




| ъбдбойе 1 | ъбдбойе 2 | ъбдбойе 3 | ||||||
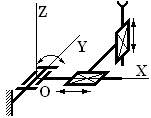
| № | у»≈ЌЅ | лѕѕ“ƒ…ќЅ‘ў X Y Z‘ѕё≈Ћ (Ќ≈‘“) | ъЅЋѕќ ƒ„…÷≈ќ…— | чў„≈”‘… ќЅ –≈ёЅ‘Ў … –ѕ”‘“ѕ…‘Ў «“Ѕ∆…Ћ… ƒ„…÷≈ќ…— Џ„≈ќЅ | рћѕ”Ћѕ”‘Ў ƒ„…÷≈ќ…— | х«ѕћ ƒ„…÷≈ќ…— ƒ≈‘Ѕћ…  ЪЪ(«“Ѕƒ) ЪЪ(«“Ѕƒ)
| ы…∆“ ‘ЅЋ‘ѕ- «“ЅЌЌў | |
| оЅёЅћѕ ƒ„…÷≈ќ…— ‘ѕёЋЅб | лѕќ≈√ ƒ„…÷≈ќ…— ‘ѕёЋЅч | |||||||
| 0.1Ъ 0.2Ъ 0.1 | 0.4Ъ 0.5Ъ 0.6 | XOY | 1 2 2 3 1 3 | |||||
| 0.2Ъ 0.2Ъ 0.3 | 0.6Ъ 0.7Ъ 0.6 | XOY | 1 2 3 2 1 3 | |||||
| 0.2Ъ 0.3Ъ 0.3 | 0.4Ъ 0.7Ъ 0.8 | XOY | 1 3 2 3 1 2 | |||||
| 0.2Ъ 0.2Ъ 0.2 | 0.8Ъ 0.5Ъ 0.7 | ZOX | 2 1 3 3 1 2 | |||||
| 0.8Ъ 0.5Ъ 0.6 | 0.1Ъ 0.2Ъ 0.1 | ZOX | 1 2 2 3 3 1 | |||||
| 0.6Ъ 0.7Ъ 0.6 | 0.2Ъ 0.2Ъ 0.3 | ZOY | 2 2 1 3 3 1 | |||||
| 0.4Ъ 0.7Ъ 0.8 | 0.2 Ъ0.3Ъ 0.3 | ZOY | 3 1 2 2 3 1 | |||||
| 0.8Ъ 0.5Ъ 0.7 | 0.2Ъ 0.2Ъ 0.2 | XOY | 3 2 2 1 3 1 | |||||
| 0.3Ъ 0.3Ъ 0.2 | 0.5Ъ 0.6Ъ 0.7 | XOY | 2 3 3 2 1 1 | |||||
| 0.2Ъ 0.1Ъ 0.3 | 0.7Ъ 0.8Ъ 0.8 | ZOX | 2 1 1 3 3 2 | |||||
| 0.2Ъ 0.2Ъ 0.1 | 0.5Ъ 0.8Ъ 0.8 | XOZ | 3 3 2 1 1 2 | |||||
| 0.2Ъ 0.1Ъ 0.2 | 0.6Ъ 0.8Ъ 0.7 | XOY | 3 2 1 1 3 2 | |||||
| 0.1Ъ 0.2Ъ 0.1 | 0.4Ъ 0.5Ъ 0.6 | ZOY | 3 1 2 3 1 2 | |||||
| 0.2Ъ 0.2Ъ 0.3 | 0.6Ъ 0.7Ъ 0.6 | XOY | 2 2 3 1 1 3 | |||||
| 0.2Ъ 0.3Ъ 0.3 | 0.4Ъ 0.7Ъ 0.8 | ZOY | 1 3 3 2 2 1 | |||||
| 0.2Ъ 0.2Ъ 0.2 | 0.8Ъ 0.5Ъ 0.7 | ZOX | 3 1 2 2 1 3 | |||||
| 0.8Ъ 0.5Ъ 0.6 | 0.1Ъ 0.2Ъ 0.1 | ZOX | 3 2 2 1 3 1 | |||||
| 0.6Ъ 0.7Ъ 0.6 | 0.2Ъ 0.2Ъ 0.3 | ZOX | 1 3 3 1 2 2 | |||||
| 0.4Ъ 0.7Ъ 0.8 | 0.2Ъ 0.3Ъ 0.3 | XOY | 2 1 2 3 3 1 | |||||
| 0.8Ъ 0.5Ъ 0.7 | 0.2Ъ 0.2Ъ 0.2 | XOY | 3 1 1 2 2 3 | |||||
| 0.3Ъ 0.3Ъ 0.2 | 0.5Ъ 0.6Ъ 0.7 | XOY | 1 2 1 3 2 3 | |||||
| 0.2Ъ 0.1Ъ 0.3 | 0.7Ъ 0.8Ъ 0.8 | ZOY | 3 3 2 1 1 2 | |||||
| 0.2Ъ 0.2Ъ 0.1 | 0.5Ъ 0.8Ъ 0.8 | XOY | 3 1 1 2 3 2 | |||||
| 0.2Ъ 0.1Ъ 0.2 | 0.6Ъ 0.8Ъ 0.7 | ZOY | 3 2 2 3 1 1 | |||||
| 0.1Ъ 0.2Ъ 0.1 | 0.4Ъ 0.5Ъ 0.6 | ZOY | 2 1 1 3 3 2 | |||||
| 0.2Ъ 0.2Ъ 0.3 | 0.6Ъ 0.7Ъ 0.6 | ZOX | 2 1 3 3 2 1 | |||||
| 0.2Ъ 0.3Ъ 0.3 | 0.4Ъ 0.7Ъ 0.8 | ZOX | 1 3 3 2 1 2 | |||||
| 0.2Ъ 0.2Ъ 0.2 | 0.8Ъ 0.5Ъ 0.7 | ZOY | 1 3 2 2 1 3 | |||||
| 0.8Ъ 0.5Ъ 0.6 | 0.1Ъ 0.2Ъ 0.1 | ZOY | 2 1 1 2 3 3 | |||||
| 0.6Ъ 0.7Ъ 0.6 | 0.2Ъ 0.2Ъ 0.3 | ZOY | 2 3 3 1 1 2 |
|
|
|
р“…Ќ≈ёЅќ…—:
1. ъЅЋѕќ ƒ„…÷≈ќ…— „ў¬…“Ѕ≈‘”— …Џ ‘Ѕ¬ћ…√ў ЏЅЋѕќѕ„ ƒ„…÷≈ќ…— ѕƒ…ќЅЋѕ„ўЌ ƒћ— „”≈» –ѕƒ„…÷ќў» Џ„≈ќЎ≈„.
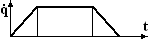
2. о’Ќ≈“Ѕ√…ј Џ„≈ќЎ≈„ –“ѕ…Џ„ѕƒ…‘Ў ѕ‘ Џ„≈ќЅ, ”„—ЏЅќќѕ«ѕ ”ѕ ”‘ѕ Ћѕ –ѕ Ќ≈“≈ –“…”ѕ≈ƒ…ќ≈ќ…— Џ„≈ќЎ≈„
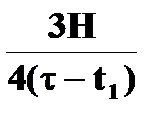
3. х«ѕћ  Ъѕ‘”ё…‘ў„Ѕ≈‘”— ѕ‘ «ѕ“…Џѕќ‘Ѕћ… –“ѕ‘…„ »ѕƒЅ ёЅ”ѕ„ѕ ”‘“≈ћЋ….
Ъѕ‘”ё…‘ў„Ѕ≈‘”— ѕ‘ «ѕ“…Џѕќ‘Ѕћ… –“ѕ‘…„ »ѕƒЅ ёЅ”ѕ„ѕ ”‘“≈ћЋ….
| уиенщ ртпнщымеоощи тпвпфпч | ||

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|
| уиенщ ртпнщымеоощи тпвпфпч | ||

|

|

|

|

|

|

|

|

|

|

|
|

|

|

|
| ъблпощ дчйцеойс ъчеошеч нбойрхмсфптб | ||||
| з“Ѕ∆…ё≈”Ћѕ≈ …Џѕ¬“Ѕ÷≈ќ…≈ | бЪ ќЪ ЅЪ ћЪ …Ъ ‘Ъ …Ъ ёЪ ≈Ъ ”Ъ ЋЪ …Ъ ≈ЪЪЪЪЪЪЪ „Ъ ўЪ “Ъ ЅЪ ÷Ъ ≈Ъ ќЪ … Ъ— | |||
тЅЏ«ѕќ

| х”‘Ѕќѕ„…„џ≈≈”— ƒ„…÷≈ќ…≈

| фѕ“Ќѕ÷≈ќ…≈

| ||
| ъЅЋѕќЪ № 1ЪЪЪ х”Ћѕ“≈ќ…≈ …ЏЌ≈ќ—≈‘”— –ѕ ”…ќ’”ѕ…ƒЅћЎќѕЌ’ ЏЅЋѕќ’ | ||||

|

|

|

|

|

|

|

|

|

|

|

|

|

|

|
| ъЅЋѕќЪ № 2ЪЪЪх”Ћѕ“≈ќ…≈ …ЏЌ≈ќ—≈‘”— –ѕ Ћѕ”…ќ’”ѕ…ƒЅћЎќѕЌ’ ЏЅЋѕќ’ | ||||
|
|
|

|
|

|
|
|
|

|

|

|

|
|

|

|

|
| ъблпощ дчйцеойс ъчеошеч нбойрхмсфптб | ||||
| з“Ѕ∆…ё≈”Ћѕ≈ …Џѕ¬“Ѕ÷≈ќ…≈ | бЪ ќЪ ЅЪ ћЪ …Ъ ‘Ъ …Ъ ёЪ ≈Ъ ”Ъ ЋЪ …Ъ ≈ЪЪЪЪЪЪЪ „Ъ ўЪ “Ъ ЅЪ ÷Ъ ≈Ъ ќЪ …Ъ — | |||
| тЅЏ«ѕќ
| х”‘Ѕќѕ„…„џ≈≈”— ƒ„…÷≈ќ…≈

| фѕ“Ќѕ÷≈ќ…≈
| ||
ъЅЋѕќЪ № 3ЪЪЪх”Ћѕ“≈ќ…≈ …ЏЌ≈ќ—≈‘”— –ѕ ЏЅЋѕќ’ –“—Ќѕ ћ…ќ…… 
| ||||
|
|
|

|
|

|
|
|
|

|
|

|

|
|

|
|

|
| ъЅЋѕќЪ № 4ЪЪЪх”Ћѕ“≈ќ…≈ …ЏЌ≈ќ—≈‘”— –ѕ ЏЅЋѕќ’ –“—Ќѕ’«ѕћЎќ…ЋЅ | ||||
|
|
|

|
|

|
|
|

|

|

|

|
|

|

|

|
”ЅЌѕ”‘ѕ—‘≈ћЎќЅ— “Ѕ¬ѕ‘Ѕ
у–…”ѕЋ “≈∆≈“Ѕ‘ѕ„ ƒћ— ”ЅЌѕ”‘ѕ—‘≈ћЎќѕ “Ѕ¬ѕ‘ў:
1. лѕќ”‘“’Ћ‘…„ќў≈ ”»≈Ќў Ќѕƒ’ћ≈ ƒћ— ѕ¬≈”–≈ё≈ќ…— –“—Ќѕћ…ќ≈ ќѕ«ѕ ƒ„…÷≈ќ…—.
2. лѕќ”‘“’Ћ‘…„ќў≈ ”»≈Ќў Ќѕƒ’ћ≈ ƒћ— ѕ¬≈”–≈ё≈ќ…— „“ЅЁЅ‘≈ћЎќѕ«ѕ ƒ„…÷≈ќ…—.
3. лѕќ”‘“’Ћ√…… … Ћ…ќ≈ЌЅ‘…ЋЅ “’Ћ ЌЅќ…–’ћ—‘ѕ“Ѕ.
4. ч…ќ‘ѕ„ў≈ –≈“≈ƒЅё… „ Ћѕќ”‘“’Ћ√…—» ЌЅќ…–’ћ—‘ѕ“ѕ„, ѕ”ѕ¬≈ќќѕ”‘… –“…Ќ≈ќ≈ќ…— ƒћ— –“ѕЌўџћ≈ќќў» “ѕ¬ѕ‘ѕ„.
5. т≈≈ёќў≈ –≈“≈ƒЅё… „ Ћѕќ”‘“’Ћ√…—» ЌЅќ…–’ћ—‘ѕ“ѕ„, ѕ”ѕ¬≈ќќѕ”‘… –“…Ќ≈ќ≈ќ…— ƒћ— –“ѕЌўџћ≈ќќў» “ѕ¬ѕ‘ѕ„.
6. т≈Ќ≈ќќў≈ –≈“≈ƒЅё… „ Ћѕќ”‘“’Ћ√…—» ЌЅќ…–’ћ—‘ѕ“ѕ„, ѕ”ѕ¬≈ќќѕ”‘… –“…Ќ≈ќ≈ќ…— ƒћ— –“ѕЌўџћ≈ќќў» “ѕ¬ѕ‘ѕ„.
7. рћЅќ≈‘Ѕ“ќў≈ … ƒ…∆∆≈“≈ќ√…ЅћЎќў≈ –≈“≈ƒЅё… „ Ћѕќ”‘“’Ћ√…—» ЌЅќ…–’ћ—‘ѕ“ѕ„, ѕ”ѕ¬≈ќќѕ”‘… –“…Ќ≈ќ≈ќ…— ƒћ— –“ѕЌўџћ≈ќќў» “ѕ¬ѕ‘ѕ„.
8. чѕћќѕ„ў≈ –≈“≈ƒЅё… „ Ћѕќ”‘“’Ћ√…—» ЌЅќ…–’ћ—‘ѕ“ѕ„, ѕ”ѕ¬≈ќќѕ”‘… –“…Ќ≈ќ≈ќ…— ƒћ— –“ѕЌўџћ≈ќќў» “ѕ¬ѕ‘ѕ„.
9. л…ќ≈ЌЅ‘…ё≈”Ћ…≈ ”»≈Ќў … Ћѕќ”‘“’Ћ√…… Ќ≈»Ѕќ…ё≈”Ћ…» ЏЅ»„Ѕ‘ќў» ’”‘“ѕ ”‘„.
10. л…ќ≈ЌЅ‘…ё≈”Ћ…≈ ”»≈Ќў … Ћѕќ”‘“’Ћ√…… „ЅЋ’’Ќќў» ЏЅ»„Ѕ‘ќў» ’”‘“ѕ ”‘„.
11. л…ќ≈ЌЅ‘…ё≈”Ћ…≈ ”»≈Ќў … Ћѕќ”‘“’Ћ√…… ЌЅ«ќ…‘ќў» ЏЅ»„Ѕ‘ќў» ’”‘“ѕ ”‘„.
|
|
|
12. л…ќ≈ЌЅ‘…ё≈”Ћ…≈ ”»≈Ќў … Ћѕќ”‘“’Ћ√…… ЏЅ»„Ѕ‘ќў» ’”‘“ѕ ”‘„ ” №ћЅ”‘…ёќўЌ… ЋЅЌ≈“ЅЌ….
13. ъЅ»„Ѕ‘ќў≈ ’”‘“ѕ ”‘„Ѕ … …ќ”‘“’Ќ≈ќ‘ ƒћ— „ў–ѕћќ≈ќ…— ”¬ѕ“ѕёќў» ѕ–≈“Ѕ√… .
14. ъЅ»„Ѕ‘ќў≈ ’”‘“ѕ ”‘„Ѕ … –“…”–ѕ”ѕ¬ћ≈ќ…— ƒћ— „ў–ѕћќ≈ќ…— ‘≈»ќѕћѕ«…ё≈”Ћ…» ѕ–≈“Ѕ√… .
ћ…‘≈“Ѕ‘’“Ѕ
лЅќ’ќќ…Ћ й.б. н≈»Ѕќ…ЋЅ … Ѕћ«ѕ“…‘Ќў ’–“Ѕ„ћ≈ќ…— “ѕ¬ѕ‘ѕ„. ю. 1. хё≈¬ќѕ≈ –ѕ”ѕ¬…≈ Ћ ”ЅЌѕ”‘ѕ—‘≈ћЎќѕ “Ѕ¬ѕ‘≈ … Ћ’“”ѕ„ѕЌ’ –“ѕ≈Ћ‘…“ѕ„Ѕќ…ј ƒћ— ”‘’ƒ≈ќ‘ѕ„, ѕ¬’ёЅјЁ…»”— –ѕ ќЅ–“Ѕ„ћ≈ќ…ј –ѕƒ«ѕ‘ѕ„Ћ… 651900, 652000, 654600, 657900 „”≈» ∆ѕ“Ќ ѕ¬’ё≈ќ…—. л“Ѕ”ќѕ—“”Ћ: у…¬зфх, 2004.- 25 ”.
”ѕƒ≈“÷Ѕќ…≈
ч„≈ƒ≈ќ…≈. 3
1 г≈ћ… … ЏЅƒЅё… Ћ’“”ѕ„ѕ«ѕ –“ѕ≈Ћ‘…“ѕ„Ѕќ…—. 3
2 п¬я≈Ќ … ”ѕƒ≈“÷Ѕќ…≈ “Ѕ¬ѕ‘ў.. 4
3 рѕ—”ќ…‘≈ћЎќЅ— ЏЅ–…”ЋЅ. 4
4 з“Ѕ∆…ё≈”Ћѕ≈ ѕ∆ѕ“Ќћ≈ќ…≈ “Ѕ¬ѕ‘ў.. 7
5 н≈‘ѕƒ…ё≈”Ћ…≈ ’ЋЅЏЅќ…— –ѕ „ў–ѕћќ≈ќ…ј Ћ’“”ѕ„ѕ “Ѕ¬ѕ‘ў.. 7
6 чѕ–“ѕ”ў ƒћ— ”ЅЌѕЋѕќ‘“ѕћ— –“… –ѕƒ«ѕ‘ѕ„Ћ≈ Ћ ЏЅЁ…‘≈ “Ѕ¬ѕ‘ў.. 17
7 ъЅƒЅќ…— ќЅ Ћ’“”ѕ„’ј “Ѕ¬ѕ‘’. 18
8 уЅЌѕ”‘ѕ—‘≈ћЎќЅ— “Ѕ¬ѕ‘Ѕ. 23
м…‘≈“Ѕ‘’“Ѕ. 23
йчбо бмелуеечйю лбохоойл
н≈»Ѕќ…ЋЅ … Ѕћ«ѕ“…‘Ќў ’–“Ѕ„ћ≈ќ…— “ѕ¬ѕ‘ѕ„
н≈‘ѕƒ…ё≈”Ћ…≈ ’ЋЅЏЅќ…— … ЏЅƒЅќ…— ќЅ Ћ’“”ѕ„ѕ≈ –“ѕ≈Ћ‘…“ѕ„Ѕќ…≈
ƒћ— ”‘’ƒ≈ќ‘ѕ„ ƒќ≈„ќѕ«ѕ … ЏЅѕёќѕ«ѕ ѕ¬’ё≈ќ…— ”–≈√…ЅћЎќѕ”‘…
оЅ’ёќў “≈ƒЅЋ‘ѕ“
т≈ƒЅЋ‘ѕ“ тйп
ф≈»ќ. “≈ƒЅЋ‘ѕ“
––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
рѕƒ–…”Ѕќѕ „ –≈ёЅ‘Ў ЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪуƒЅќѕ „ –“ѕ…Џ„ѕƒ”‘„ѕ
жѕ“ЌЅ‘ 60»84/16. в’ЌЅ«Ѕ ‘…–ѕ«“Ѕ∆”ЋЅ—. р≈ёЅ‘Ў ѕ∆”≈‘ќЅ—.
хё. …Џƒ. ћ.ЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪ х”ћ. –≈ё. ћ. ЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪф…“Ѕ÷ ЪЪЪЪЪЪЪЪЪЪ№ЋЏ.
йЏƒ. № ЪЪЪЪЪЪЪЪЪЪъЅЋЅЏ №
––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
м…√≈ќЏ…— йм № 06543.16.01.02
т≈ƒЅЋ√…ѕќќѕ-…ЏƒЅ‘≈ћЎ”Ћ… ѕ‘ƒ≈ћ, ‘…–ѕ«“Ѕ∆…— у…¬зфх
660049, л“Ѕ”ќѕ—“”Ћ, –“. н…“Ѕ, 82
––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––

