




дћ— ЏЅƒЅќќѕ ”»≈Ќў –“ѕЌўџћ≈ќќѕ«ѕ “ѕ¬ѕ‘Ѕ ќ≈ѕ¬»ѕƒ…Ќѕ:
Ю „ў„≈”‘… ∆ѕ“Ќ’ћў, ѕ–“≈ƒ≈ћ—јЁ…≈ ≈«ѕ Ћ…ќ≈ЌЅ‘…ё≈”Ћ…≈ –Ѕ“ЅЌ≈‘“ў, ‘ѕ ≈”‘Ў ѕ–“≈ƒ≈ћ…‘Ў Ћѕѕ“ƒ…ќЅ‘ў X Y Z, ”Ћѕ“ѕ”‘… vx vy vz … ’”Ћѕ“≈ќ…— ax ay az ЏЅ»„Ѕ‘Ѕ –ѕ ЏЅƒЅќќўЌ ЏЅЋѕќЅЌ ƒ„…÷≈ќ…— Џ„≈ќЎ≈„ ЌЅќ…–’ћ—‘ѕ“Ѕ;
Ю „ў¬“Ѕ‘Ў ќ≈ѕ¬»ѕƒ…Ќў≈ “ЅЏЌ≈“ў Џ„≈ќЎ≈„ ЌЅќ…–’ћ—‘ѕ“Ѕ, ’”‘Ѕќѕ„…‘Ў ќЅёЅћЎќў≈ … Ћѕќ≈ёќў≈ –ѕћѕ÷≈ќ…— –ѕƒ„…÷ќў» Џ„≈ќЎ≈„, Ѕ ‘ЅЋ÷≈ ЌЅЋ”…ЌЅћЎќў≈ –≈“≈Ќ≈Ё≈ќ…— (»ѕƒ) –ѕƒ„…÷ќў» Џ„≈ќЎ≈„.
Ю –ѕ –ѕћ’ё≈ќќўЌ ∆ѕ“Ќ’ћЅЌ ”ѕ”‘Ѕ„…‘Ў –“ѕ«“ЅЌЌ’ … „ўё…”ћ…‘Ў ЏќЅё≈ќ…— Ћ…ќ≈ЌЅ‘…ё≈”Ћ…» –Ѕ“ЅЌ≈‘“ѕ„;
Ю –ѕ “≈Џ’ћЎ‘Ѕ‘ЅЌ „ўё…”ћ≈ќ… –ѕ”‘“ѕ…‘Ў:
Ю ‘“Ѕ≈Ћ‘ѕ“…ј ƒ„…÷≈ќ…— √≈ќ‘“Ѕ ЏЅ»„Ѕ‘Ѕ „ –“ѕ”‘“Ѕќ”‘„≈ќќѕ ”…”‘≈Ќ≈ Ћѕѕ“ƒ…ќЅ‘ OXYZ;
Ю «“Ѕ∆…Ћ… ”Ћѕ“ѕ”‘≈ vx vy vz … ’”Ћѕ“≈ќ… ax ay az „ ∆’ќЋ√…… ѕ‘ „“≈Ќ≈ќ… t;
Ю «“Ѕ∆…Ћ… –≈“≈Ќ≈Ё≈ќ…—, ”Ћѕ“ѕ”‘… … ’”Ћѕ“≈ќ…— ѕƒќѕ«ѕ …Џ Џ„≈ќЎ≈„ ЌЅќ…–’ћ—‘ѕ“Ѕ „ ∆’ќЋ√…… ѕ‘ „“≈Ќ≈ќ… t.
лѕѕ“ƒ…ќЅ‘ў ќЅёЅћЅ ƒ„…÷≈ќ…— (‘ѕёЋЅ б) … Ћѕќ√Ѕ ƒ„…÷≈ќ…— (‘ѕёЋЅ ч) ЏЅƒЅќў.
о≈ƒѕ”‘ЅјЁ…≈ –Ѕ“ЅЌ≈‘“ў, ‘ЅЋ…≈ ЋЅЋ ќ≈…ЏЌ≈ќ—≈Ќў≈ “ЅЏЌ≈“ў Џ„≈ќЎ≈„, „“≈Ќ— ƒ„…÷≈ќ…—  , „“≈Ќ— “ЅЏ«ѕќЅ … ‘ѕ“Ќѕ÷≈ќ…— t 1 ќЅЏќЅёЅј‘”— ”ЅЌѕ”‘ѕ—‘≈ћЎќѕ.
, „“≈Ќ— “ЅЏ«ѕќЅ … ‘ѕ“Ќѕ÷≈ќ…— t 1 ќЅЏќЅёЅј‘”— ”ЅЌѕ”‘ѕ—‘≈ћЎќѕ.
н≈‘ѕƒ…ЋЅ Ћ…ќ≈ЌЅ‘…ё≈”Ћѕ«ѕ …””ћ≈ƒѕ„Ѕќ…— –“ѕЌўџћ≈ќќў» “ѕ¬ѕ‘ѕ„ …Џћѕ÷≈ќЅ „ ’ё≈¬ќѕЌ –ѕ”ѕ¬…… [1]
тЅ””Ќѕ‘“…Ќ ЋѕќЋ“≈‘ќў –“…Ќ≈“. дћ— ”»≈Ќў ЌЅќ…–’ћ—‘ѕ“Ѕ (“…”’ќѕЋ 1,Ѕ) ЏЅƒЅќў ”…ќ’”ѕ…ƒЅћЎќў≈ ЏЅЋѕќў …ЏЌ≈ќ≈ќ…— ѕ¬ѕ¬Ё≈ќќў» Ћѕѕ“ƒ…ќЅ‘. ф“≈¬’≈‘”— ќЅ ‘… –ѕћѕ÷≈ќ…≈ √≈ќ‘“Ѕ ЏЅ»„Ѕ‘Ѕ „ ќ≈–ѕƒ„…÷ќѕ ”…”‘≈Ќ≈ Ћѕѕ“ƒ…ќЅ‘ OXYZ (S).
„ў„ѕƒ “Ѕ”ё≈‘ќў» ∆ѕ“Ќ’ћ, ѕ–“≈ƒ≈ћ—јЁ…» Ћ…ќ≈ЌЅ‘…ё≈”Ћ…≈ –Ѕ“ЅЌ≈‘“ў
ƒ„…÷≈ќ…— ЏЅ»„Ѕ‘Ѕ
йЏѕ¬“ЅЏ…Ќ ”»≈Ќ’ ЌЅќ…–’ћ—‘ѕ“Ѕ „ ”ѕ”‘ѕ—ќ…… ƒ„…÷≈ќ…— (“…”’ќѕЋ 1,¬). ч„≈ƒ≈Ќ ƒѕ–ѕћќ…‘≈ћЎќў≈ ‘“… –ѕƒ„…÷ќў≈ ”…”‘≈Ќў Ћѕѕ“ƒ…ќЅ‘(S1,S2 … S3). у…”‘≈Ќ’ O1X1Y1Z1(S1), ”„—÷≈Ќ ” „“ЅЁЅјЁ≈ ”— Ћѕћѕќќѕ 1. пќЅ –ѕ„≈“ќ’‘Ѕ „ѕЋ“’« ѕ”… Z ѕ‘ќѕ”…‘≈ћЎќѕ ќ≈–ѕƒ„…÷ќѕ ”…”‘≈Ќў Ћѕѕ“ƒ…ќЅ‘ S ќЅ ’«ѕћ  . у…”‘≈Ќ’ O2X2Y2Z2(S2) Ъ ”„—÷≈Ќ ”ѕ Џ„≈ќѕЌ 2. ь‘Ѕ ”…”‘≈ЌЅ Ћѕѕ“ƒ…ќЅ‘ –≈“≈Ќ≈ЁЅ≈‘”— ѕ‘ќѕ”…‘≈ћЎќѕ ”…”‘≈Ќў S1 „ „≈“‘…ЋЅћЎќѕЌ ќЅ–“Ѕ„ћ≈ќ…… „ƒѕћЎ ѕ”… Z1 ќЅ „≈ћ…ё…ќ’ l2. у…”‘≈Ќ’ O3X3Y3Z3(S3) Ъ”„—÷≈Ќ ”ѕ Џ„≈ќѕЌ 3. ь‘Ѕ ”…”‘≈ЌЅ Ћѕѕ“ƒ…ќЅ‘ ”Ќ≈Ё≈ќЅ –ѕ ѕ‘ќѕџ≈ќ…ј Ћ ”…”‘≈Ќ≈ S2 –ѕ ѕ”… Y ќЅ „≈ћ…ё…ќ’ Ѕ … –ѕ ѕ”… Z ќЅ „≈ћ…ё…ќ’ b. (“…”’ќѕЋ 1,¬).д„…÷≈ќ…≈ ‘ѕёЋ… у „ ”…”‘≈Ќ≈ Ћѕѕ“ƒ…ќЅ‘ S3 ѕ–…”ў„Ѕ≈‘”— “Ѕƒ…’”-„≈Ћ‘ѕ“ѕЌ
. у…”‘≈Ќ’ O2X2Y2Z2(S2) Ъ ”„—÷≈Ќ ”ѕ Џ„≈ќѕЌ 2. ь‘Ѕ ”…”‘≈ЌЅ Ћѕѕ“ƒ…ќЅ‘ –≈“≈Ќ≈ЁЅ≈‘”— ѕ‘ќѕ”…‘≈ћЎќѕ ”…”‘≈Ќў S1 „ „≈“‘…ЋЅћЎќѕЌ ќЅ–“Ѕ„ћ≈ќ…… „ƒѕћЎ ѕ”… Z1 ќЅ „≈ћ…ё…ќ’ l2. у…”‘≈Ќ’ O3X3Y3Z3(S3) Ъ”„—÷≈Ќ ”ѕ Џ„≈ќѕЌ 3. ь‘Ѕ ”…”‘≈ЌЅ Ћѕѕ“ƒ…ќЅ‘ ”Ќ≈Ё≈ќЅ –ѕ ѕ‘ќѕџ≈ќ…ј Ћ ”…”‘≈Ќ≈ S2 –ѕ ѕ”… Y ќЅ „≈ћ…ё…ќ’ Ѕ … –ѕ ѕ”… Z ќЅ „≈ћ…ё…ќ’ b. (“…”’ќѕЋ 1,¬).д„…÷≈ќ…≈ ‘ѕёЋ… у „ ”…”‘≈Ќ≈ Ћѕѕ“ƒ…ќЅ‘ S3 ѕ–…”ў„Ѕ≈‘”— “Ѕƒ…’”-„≈Ћ‘ѕ“ѕЌ  .
.
 ЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪ
ЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪ 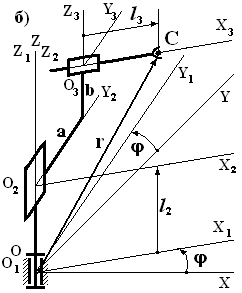
т…”’ќѕЋ 1
лѕѕ“ƒ…ќЅ‘ў „≈Ћ‘ѕ“Ѕ  , ѕ–“≈ƒ≈ћ—јЁ≈«ѕ –ѕћѕ÷≈ќ…≈ √≈ќ‘“Ѕ ЏЅ»„Ѕ‘Ѕ у „ ќ≈–ѕƒ„…÷ќѕ ”…”‘≈Ќ≈ Ћѕѕ“ƒ…ќЅ‘ OXYZ, ¬’ƒ’‘:
, ѕ–“≈ƒ≈ћ—јЁ≈«ѕ –ѕћѕ÷≈ќ…≈ √≈ќ‘“Ѕ ЏЅ»„Ѕ‘Ѕ у „ ќ≈–ѕƒ„…÷ќѕ ”…”‘≈Ќ≈ Ћѕѕ“ƒ…ќЅ‘ OXYZ, ¬’ƒ’‘:
 ,ЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪ (1)
,ЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪ (1)
«ƒ≈  Ъ-„≈Ћ‘ѕ“ ‘ѕёЋ… у „ ”…”‘≈Ќ≈ S2.
Ъ-„≈Ћ‘ѕ“ ‘ѕёЋ… у „ ”…”‘≈Ќ≈ S2.
нЅ‘“…√’ –≈“≈»ѕƒЅ  …Џ ”…”‘≈Ќў S3 „ ќ≈–ѕƒ„…÷ќ’ј ”…”‘≈Ќ’ S –ѕћ’ё…Ќ, ’Ќќѕ÷…„ ЌЅ‘“…√ў
…Џ ”…”‘≈Ќў S3 „ ќ≈–ѕƒ„…÷ќ’ј ”…”‘≈Ќ’ S –ѕћ’ё…Ќ, ’Ќќѕ÷…„ ЌЅ‘“…√ў  ,
,  Ъ….
Ъ…. 
 ЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪ (2)
ЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪ (2)
й”ЋѕЌў≈ Ћѕѕ“ƒ…ќЅ‘ў „≈Ћ‘ѕ“Ѕ r „ ќ≈–ѕƒ„…÷ќѕ ”…”‘≈Ќ≈ Ћѕѕ“ƒ…ќЅ‘ OXYZ “Ѕ„ќў
 ЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪ (3)
ЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪ (3)
д…∆∆≈“≈ќ√…“’— –ѕћ’ё≈ќќў≈ ’“Ѕ„ќ≈ќ…— ‘“Ѕ≈Ћ‘ѕ“…… √≈ќ‘“Ѕ ЏЅ»„Ѕ‘Ѕ у –ѕ „“≈Ќ≈ќ… t, –ѕћ’ё…Ќ „ў“Ѕ÷≈ќ…— –“ѕ≈Ћ√…… ”Ћѕ“ѕ”‘… ‘ѕёЋ… у ќЅ Ћѕѕ“ƒ…ќЅ‘ќў≈ ѕ”…:
 ЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪ (4)
ЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪ (4)
е”ћ… –“ѕƒ…∆∆≈“≈ќ√…“ѕ„Ѕ‘Ў –ѕ „“≈Ќ≈ќ… ЅќЅћ…‘…ё≈”Ћ…≈ „ў“Ѕ÷≈ќ…— ƒћ— ”Ћѕ“ѕ”‘…, ‘ѕ –ѕћ’ё…Ќ –“ѕ≈Ћ√…… ’”Ћѕ“≈ќ…— ‘ѕёЋ… у
|
|
|
 ЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪ (5)
ЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪЪ (5)

