




| Элемент | Условное обозначение |
| Пневмодроссель нерегулируемый (Нерегулируемое пневмосопротивление) Пневмодроссель регулируемый Питание Атмосфера Устройство сопло – заслонка (пневмоконтакт) Сопло закрыто Пневмокамера постоянного объема (пневмоемкость) Переключатель | 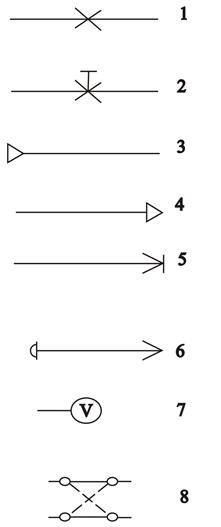
|
Пневмокамеры предназначены для накопления сжатого воздуха.
Объем пневмокамеры примерно равен 50 см3. В сочетании с дросселями пневмокамеры используют как инерционные элементы. В зависимости от схемы подвода и отвода воздуха они могут быть глухими или проточными (рис. 7.2).
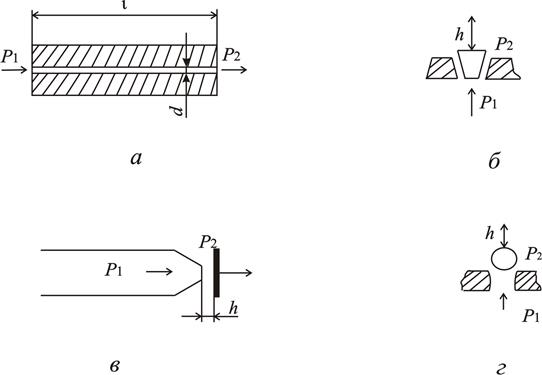
Рис. 7.1. Схемы постоянного (а), регулируемого (б) и переменных (в – сопло-заслонка, г – шарик-цилиндр) дросселей
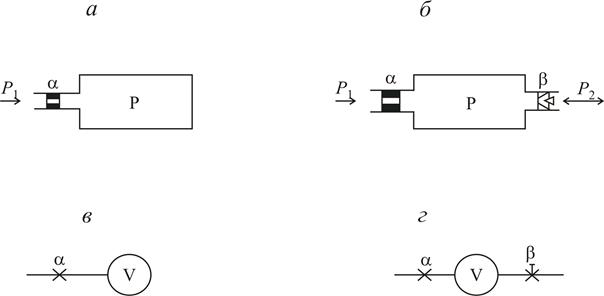
Рис. 7.2. Глухая (а) и проточная (б) пневмокамеры
и их обозначения (в, г)
7.2. Мембранные пневматические элементы УСЭППА.
Комплекс приборов «Старт»
Элемент сравнения предназначен для сравнения двух или четырех входных сигналов (рис. 7.3). Он формирует на выходе дискретные сигналы 0 или 1. Трехмембранный элемент сравнения на два входа состоит из четырех камер, ограниченных секциями корпуса и блоком трех мембран, связанных между собой штоком и закрепленных по периметру. Площадь средней мембраны превышает площади крайних. Жесткие центры крайних мембран служат заслонками сопел в камерах А и Г. Камеры А и Г сообщены между собой. Воздух питания через верхнее сопло поступает в камеру Г. Через нижнее сопло камера А сообщается с атмосферой. Давление в камерах А и Г – выходной сигнал элемента сравнения Р вых. Входные сигналы P 1 и Р 2подаются в камеры В и Б.
Блок мембран находится под воздействием сил, развиваемых давлениями в камерах элемента сравнения. Мембраны обладают малой жесткостью, и поэтому даже при рассогласовании входных давлений, равном всего 150–200 Па, суммарное усилие достаточно для перемещения блока мембран в одно из крайних положений. При P 1 > P 2 результирующая сила будет направлена вниз, и блок мембран опустится. Сопло в камере А при этом закроется и перекроет линию выхода воздуха в атмосферу, а сопло в камере Г откроется, и воздух питания, поступая в камеры А и Г, сформирует на выходе элемента сравнения сигнал 1. При P 1 < P 2 мембранный блок поднимается вверх, сопло в камере Г закроется, и прекратится подача воздуха питания, а сопло в камере А откроется, и линия выхода элемента сравнения сообщится с атмосферой. При этом сигнал на выходе станет равным 0. Таким образом, трехмембранный элемент сравнения представляет собой пневматическое реле, отрабатывающее зависимость:
Р вых = 1 при P 1 > P 2
Р вых = 0 при P 1 < P 2
На структурных схемах элементы сравнения представляют в виде последовательно соединенных узла суммирования, на который поступают входные сигналы со своими знаками, и релейного звена.
В пневматических приборах пятимембранные элементы сравнения часто используют в качестве мембранного сумматора для алгебраического суммирования непрерывных входных сигналов (рис. 7.4). Для этого выходной сигнал Р вых направляют в камеру Б (камеру отрицательной обратной связи). Элемент приходит в равновесие, когда усилия, развиваемые входными давлениями, уравновешиваются усилием, создаваемым Р вых = Р Б, и расходы воздуха через пневмоконтакты «сопло-заслонка» равны. Так как суммарные площади мембран в камерах Б, В, Г и Д одинаковы, то при равновесии справедливо равенство
Р вых = P 1 – Р 2 + Р 3.
Следовательно, при такой коммутации элемент сравнения выполняет функцию сумматора, который складывает два сигнала со знаком плюс и один – со знаком минус.
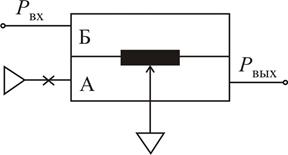
Повторители давления (усилители мощности) предназначены для усиления расхода воздуха на выходе при постоянных давлениях на входе и выходе. Их применяют для уменьшения запаздывания сигналов в пневмокамерах большого объема в длинных пневмолиниях, а также для развязки пневматических цепей.
В маломощном повторителе давления (рис. 7.5) между двумя секциями зажата по периметру мембрана, жесткий центр которой является заслонкой сопла, расположенного в камере А и сообщающего ее с атмосферой. Входной сигнал Р вх подается в камеру Б. В камеру А через постоянный дроссель, поступает давление питания. Давление в камере А – выходной сигнал Р вых. С увеличением Р вх мембрана прогибается вниз. При этом уменьшается расстояние между заслонкой и соплом, уменьшается расход воздуха из камеры А через сопло в атмосферу и выходное давление Р вых возрастает до значения Р вх. В момент равновесия расходы воздуха через постоянный дроссель и пневмоконтакт сопло-заслонка одинаковы.
Мощный повторитель давления имеет три секции и состоит из связанных в мембранный блок двух мембран равной площади и клапана-дросселя.
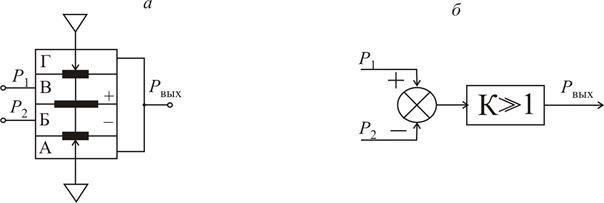
Рис. 7.3. Трехмембранный элемент сравнения (а) и его структурная схема (б)
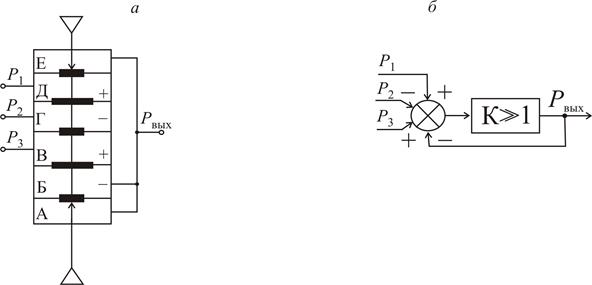
Рис. 7.4. Мембранный сумматор (а) и его структурная схема (б)
|
Уменьшение погрешности повторения обеспечивает более сложный повторитель. Он имеет четыре секции и состоит из трех мембран одинаковой площади, образующих шесть камер, клапана, поджатого пружиной, двух пневмоконтактов «сопло-заслонка» и постоянного дросселя.
Уравнение работы всех повторителей-усилителей мощности имеет вид
Р вых = Р вх
Их передаточные функции: по давлению WP (P) = 1, по расходу воздуха WF (P) = k >>1. На структурных схемах повторители-усилители представляют в виде одного звена с соответствующей передаточной функцией.
Задатчик давления (рис. 7.6) в комплекте с постоянным дросселем предназначен для ручной установки заданного сигнала. Он состоит из камер А и Б, разделенных плоской мембраной, жесткий центр которой служит заслонкой сопла. Воздух питания проходит через дроссель в камеру А и выходит из нее через сопло в атмосферу. Выходной сигнал задатчика – давление воздуха в камере А. Камера Б сообщена с атмосферой. На мембрану со стороны камеры Б действует сила натяжения пружины, устанавливаемая винтом, а со стороны камеры А – сила давления воздуха. При изменении натяжения пружины мембрана, прогибаясь, изменяет зазор пневмоконтакта «сопло-заслонка» и расход воздуха из камеры А в атмосферу. В результате этого давление воздуха в камере А и в выходной линии задатчика изменяется.
Выключающее реле (рис. 7.7) предназначено для отключения или переключения (коммутирования) входных сигналов при подаче на него командного дискретного сигнала Р к. Реле состоит из трех камер А, Б и В, которые разделены двумя мембранами, соединенными в блок штоком, двух сопел и пружины. Жесткие центры мембран выполняют роль заслонок по отношению к соплам и вместе с ними образуют два пневмоконтакта «сопло-заслонка: один (сопло C 1) – нормально открытый, второй (сопло С 2) – нормально закрытый. Входные сигналы P 1 и Р 2 подводят к соплам C 1 и С2, командный сигнал Р к – в камеру А, выходной сигнал Р вых отводится из камеры Б. Камера В сообщена с атмосферой.
Выключающее реле относится к элементам дискретного действия. При Р к = 0 блок мембран под действием пружины в камере Б опустится вниз, сопло С 2 закрывается, сопло C 1 открывается и сигнал P 1 проходит на выход реле. При Р к = 1 на блок мембран со стороны камеры А действует усилие, превышающее силу натяжения пружины, блок мембран поднимается вверх, сопло C 1 закрывается, сопло С 2 открывается и на выход реле проходит сигнал Р 2. В регуляторах реле при подаче на него давления Р к запирает выходной сигнал регулятора, а при сбросе Р к – сообщает выход регулятора с исполнительным устройством.
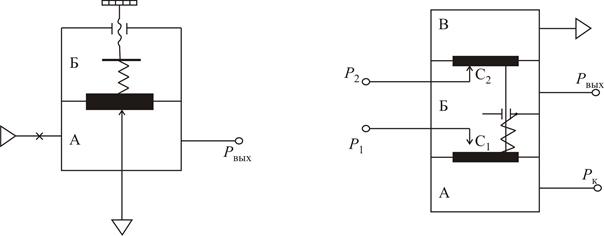
| Рис. 7.6. Задатчик давления | Рис. 7.7. Выключающее реле |
На базе элементов системы УСЭППА построен пневматический комплекс приборов «Старт», позволяющий реализовывать различные алгоритмы автоматизации взрыво- и пожароопасных процессов.
В состав комплекса «Старт» входят вторичные измерительные приборы и станции управления, регулирующие приборы, различные функциональные блоки и вспомогательные устройства. Комплекс «Старт» составляет центральную часть пневматической ветви Государственной системы промышленных приборов и средств автоматизации, в составе которой кроме аппаратуры «Старт» имеются датчики; электропневматические, пневмоэлектрические и пневмогидравлические преобразователи; исполнительные механизмы; регулирующие органы; аппаратура питания и вспомогательные устройства.
В табл. 7.2 в качестве примера приведены типы и основные характеристики некоторых регулирующих устройств комплекса приборов «Старт». Эти устройства представляют собой конструктивно законченные функциональные блоки, отличающиеся друг от друга главным образом законом регулирования.
В качестве примера регулирующего устройства рассмотрим регулятор ПР1.5. Позиционный регулятор (рис. 7.8) содержит задатчик 1 с дросселем 2 и прибором 3 (манометром) контроля значения задания Р зд, переключатель 4 каналов задания и входного сигнала Р вх, элемент сравнения 5 и повторитель – усилитель мощности 6, формирующий выходной сигнал регулятора Р вых.
Таблица 7.2
Регулирующие устройства комплекса «Старт»
| Наименование | Тип | Основная характеристика | Назначение |
| Позиционный регулятор | ПР.1.5-М1 | Погрешность срабатывания ±0,5% | Для двухпозиционного регулирования одной величины |
| Пропорциональный регулятор | ПР.2.8-М1 | Пределы настройки диапазона дросселирования, %: 5–100; 100–3000 | Для П-регулирования одной величины |
| Пропорционально-интеграль-ный регулятор с линейной статической характеристикой | ПР.3.31-М1 | Пределы настройки диапазона дросселирования, %: 5–100; 100–3000 плюс настройка времени изодрома от 3 с до 100 мин | Для ПИ-регулирования одной величины |
| Пропорционально-интегрально-дифференциальный регулятор | ПР.3.35-М1 | Пределы настройки диапазона дросселирования, %: 5–100; 100–3000 плюс настройка времени предварения от 3 с до 10 мин | Для ПИД-регулирования одной величины |
| Прибор умножения на постоянный коэффициент | ПР.1.3.9-М1 | Коэффициент умножения настраивается от 0,2 до 1 и от 1 до 5 | Умножение входного параметра на постоянный коэффициент (масштабирование) |
Регулятор настраивают на максимум (Р вых = 1при Р вх£ Р зд) или на минимум (Р вых = 0при Р вх£ Р зад) поворотом диска переключателя 4. Настройка заданного давления осуществляется в диапазоне Р зд = 21–100 кПа вращением винта задатчика 1.
При настройке регулятора на минимум (сплошные линии на рис. 7.8, а) сигнал Р вх подводят в камеру Бэлемента сравнения, а заданное значение Р зд – в камеру В. При Р вх < Р зд блок мембран элемента 5 перемещается вниз, сопло в камере Г открывается, а сопло в камере Азакрывается, воздух питания проходит в камеру Гповторителя 6и на выходе регулятора появляется сигнал Р вых= 1. При Р вх> Р зд мембранный блок элемента сравнения поднимается вверх, сопло в камере Гзакрывается, а в камере Аоткрывается.
При этом давление на выходе элемента сравнения, в камере Гповторителя и на выходе регулятора Р вых падает до нуля. При настройке на максимум сигнал Р вх подается в камеру В элемента сравнения, а Р зд – в камеру Б. Структурная схема регулятора ПР1.5 приведена на (рис. 7.8, б).
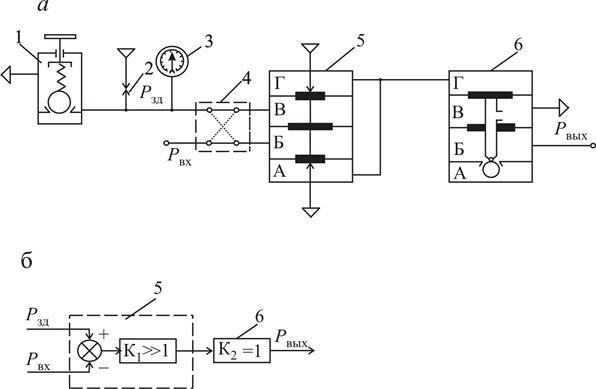
Рис. 7.8. Позиционный регулятор ПР1.5 (а) и его структурная схема (б)
Нижнее (0) значение Р вых регулятора находится в интервале 0–10 кПа, а верхнее (1) – от 110 кПа до давления питания. За основную погрешность регулятора принимают наибольшее рассогласование между значениями Р вх и Р зд, при котором срабатывает регулятор. Основная погрешность прибора составляет ±0,5 %.
7.3. Струйные пневмоэлементы
Струйные устройства основаны либо на принципе взаимодействия свободных струй, либо на принципе отрыва пограничного слоя (эффект Коанда). Струйные элементы называются активными, если к ним подводится давление питания, и пассивными, если в них используется энергия только входных сигналов. Все активные элементы являются усилителями. На (рис. 7.9, а) показан усилитель с взаимодействием струй. Он может быть и аналоговым – в этом случае струя из канала 1, куда подается давление питания Р пит, будет отклоняться тем больше, чем больше управляющий сигнал Р упр, поступающий из канала 2. При этом давление Р вых в выходном канале 3 будет возрастать. Коэффициент усиления К = Р вых/ Р упр= 3 – 4. Усилитель может быть дискретным: в этом случае при отсутствии сигнала Р упр величина Р вых= 0. При подаче определенного сигнала Р упр возникает выходной сигнал Р вых= 1, т.е. реализуется логическая связь ДА. Принцип действия струйного элемента с использованием эффекта Коанда (рис. 7.9, б) состоит в том, что если струя протекает вблизи профилированной стенки 5, тоона прилипает к ней за счет большого давления во внешней части струи. При отсутствии управляющего сигнала в канале 2струя из канала 1 попадает в канал 3. При подаче управляющего сигнала, равного порогу срабатывания Р ср (рис. 7.9, в), струя отрывается от стенки 5 и появляется выходной сигнал в канале 4. При уменьшении управляющего сигнала до величины Р отп струя снова прилипает к стенке. Таким образом элемент выполняет по каналу 3 функцию НЕ, а по каналу 4 – функцию ДА.
Достоинства струйной пневмоавтоматики (пневмоники) – надежность, долговечность, стойкость к температурным и агрессивным воздействиям окружающей среды, миниатюрность и низкая себестоимость связаны с отсутствием механических подвижных частей. Устройства пневмоники изготавливаются литьем под давлением из металла, пластмассы, керамики. Схемы строятся или с использованием набора элементов, выполняющих простейшие логические функции, или на модульном принципе. Каждый модуль реализует логическую функцию, состоящую из нескольких элементарных функций (ячейка сравнения, регистр памяти и т.д.). При серийном выпуске эффективен макромодульный принцип, при котором часть схемы (счетчик импульсов, дешифратор и т.д.) или вся она в целом отпечатывается одним штампом.
На (рис. 7.10, а) изображен струйный элемент для реализации логической функции ИЛИ на два входных сигнала. Здесь давление в выходном канале 3 возникает при появлении сигнала в любом из входных каналов 1 или 2, т.е. Q =  . В элементе И (рис. 7.10, б) при подаче сигнала на один из входов 1 или 2на выходе 3 сигнала не будет. Лишь при одновременной подаче сигналов на входы 1 и 2 в результате взаимодействия струй появится сигнал на выходе, т.е. Q =
. В элементе И (рис. 7.10, б) при подаче сигнала на один из входов 1 или 2на выходе 3 сигнала не будет. Лишь при одновременной подаче сигналов на входы 1 и 2 в результате взаимодействия струй появится сигнал на выходе, т.е. Q =  .
.
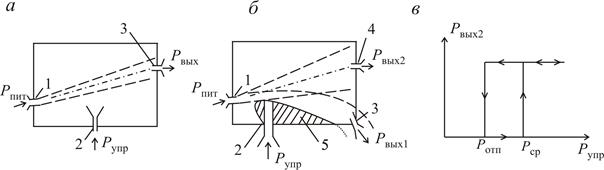
Рис. 7.9. Струйные усилители: а – с взаимодействием струй; б – с отрывом пограничного слоя; в – характеристика
Произвольная логическая функция может быть реализована как с использованием основных логических элементов НЕ, И, ИЛИ, так и с помощью различных элементарных функций, составляющих полный набор. Одной из таких функций является элемент ИЛИ-НЕ (стрелка Пирса), показанный на (рис. 7.10, в).
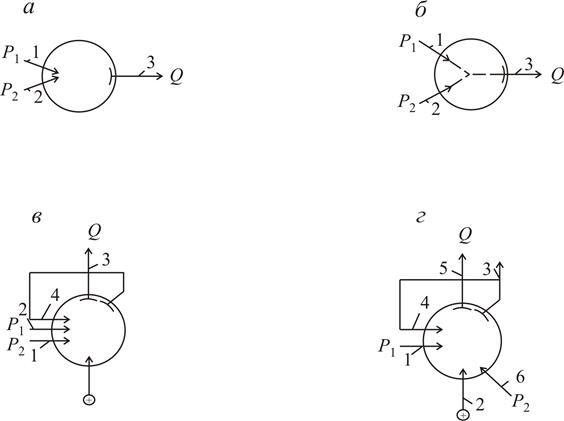
Рис. 7.10. Основные логические элементы с использованием взаимодействия свободных струй: а – элемент ИЛИ; б – элемент И; в – элемент ИЛИ-НЕ; г – элемент ПАМЯТЬ
Здесь сигнал в выходном канале 3 будет только в том случае, если нет сигналов ни в одном из входных каналов 1и 2. Канал 4 служит для устойчивого поддержания струи питания в отклоненном положении за счет обратной связи. Выходной сигнал в этом элементе  . В логическом элементе ПАМЯТЬ (рис. 7.10, г) при подаче сигнала р 1 во входной канал 1 струя из канала питания 2 поступает в выходной канал 3. При прекращении сигнала положение струи не меняется, потому, что часть воздуха из канала 3 поступает в канал обратной связи 4. Для переброса струи в исходное положение (в канал 5) подается импульс
. В логическом элементе ПАМЯТЬ (рис. 7.10, г) при подаче сигнала р 1 во входной канал 1 струя из канала питания 2 поступает в выходной канал 3. При прекращении сигнала положение струи не меняется, потому, что часть воздуха из канала 3 поступает в канал обратной связи 4. Для переброса струи в исходное положение (в канал 5) подается импульс  во второй входной канал 6. Элемент ПАМЯТЬ выполняет функции триггера с раздельными входами.
во второй входной канал 6. Элемент ПАМЯТЬ выполняет функции триггера с раздельными входами.
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ
1. Подлесный, Н. И. Элементы систем автоматического управления и контроля: учеб. для вузов / Н. И. Подлесный, В. Г. Рубанов. – Киев: Выща школа, 1991. – 461 с.
2. Медведев, А. Е. Системы автоматизации и управления: учеб. пособие / А. Е. Медведев, В. Г. Каширских.– Кемерово: КузГТУ, 1998. – 188 с.
3. Келим, Ю. М. Типовые элементы систем автоматики: учебник / Ю. М. Келим. – М.: Форум: Инфра, 2002. – 320 с.
4. Фрейден, Дж. Мир электроники: современные датчики: справочник / Дж. Фрейден. – М.: Техносфера, 2005. – 592 с.
5. Конюх, В. Л. Компьютерная автоматизация производства: Учеб. пособие: в 2 ч. / В. Л. Конюх; ГУ КузГТУ. – Кемерово, 2003. – 222 с.
6. Комплексная автоматизация производства: каталог Simatic ST70. 2003. – SIEMENC, 2003. – 975 с.
7. Краткий каталог продукции 7.0: передовые технологии автоматизации. – Компания ПРОСОФТ, 2001. – 253 с.
8. Веб-сайт Интернет по промышленным компьютерам и контроллерам: http: //www.ipc2u.ru
9. Веб-сайт Интернет по программируемым контроллерам ТЕКОН: http: //www.tecon.ru
10. Веб-сайт Интернет по приборам регулирующим про-граммируемым микропроцессорным: http: //www.aqua-kip.ccr.ru
11. Семейство контроллеров КРОСС-500, ТРАССА-500, Ремиконт Р-130 ISA: Руководство по эксплуатации: в 2 ч. / Чебоксар. завод электроники и механики. – Чебоксары, 2004. – 98 с.
 АЛЕКСЕЙ ЕЛИСЕЕВИЧ МЕДВЕДЕВ
АЛЕКСЕЙ ЕЛИСЕЕВИЧ МЕДВЕДЕВ

