Общая часть
Спутниковая навигация GPS.
GPS (англ. Global Positioning System — глобальная система позиционирования, читается Джи Пи Эс) — спутниковая система навигации, обеспечивающая измерение расстояния, времени и определяющая местоположениe. Позволяет в любом месте Земли (не включая приполярные области), почти при любой погоде, а также в космическом пространстве вблизи планеты определить местоположение и скорость объектов. Система разработана, реализована и эксплуатируется Министерством обороны США. Основной принцип использования системы — определение местоположения путём измерения расстояний до объекта от точек с известными координатами — спутников. Расстояние вычисляется по времени задержки распространения сигнала от посылки его спутником до приёма антенной GPS-приёмника. То есть, для определения трёхмерных координат GPS-приёмнику нужно знать расстояние до трёх спутников и время GPS системы. Таким образом, для определения координат и высоты приёмника используются сигналы как минимум с четырёх спутников. Идея создания спутниковой навигации родилась ещё в 50-е годы. В тот момент, когда СССР был запущен первый искусственный спутник Земли, американские учёные во главе с Ричардом Кершнером наблюдали сигнал, исходящий от советского спутника и обнаружили, что благодаря эффекту Доплера частота принимаемого сигнала увеличивается при приближении спутника и уменьшается при его отдалении. Суть открытия заключалась в том, что если точно знать свои координаты на Земле, то становится возможным измерить положение и скорость спутника, и наоборот, точно зная положение спутника, можно определить собственную скорость и координаты. Реализована эта идея была через 20 лет. В 1973 году была инициирована программа DNSS, позже переименованная в Navstar-GPS, а, затем, в GPS. Первый тестовый спутник выведен на орбиту 14 июля 1974 г. США, а последний из всех 24 спутников, необходимых для полного покрытия земной поверхности, был выведен на орбиту в 1993 г., таким образом, GPS встала на вооружение. Стало возможным использовать GPS для точного наведения ракет на неподвижные, а затем и на подвижные объекты в воздухе и на земле. Первоначально GPS — глобальная система позиционирования, разрабатывалась как чисто военный проект. Но после того, как в 1983 году вторгшийся в воздушное пространство Советского Союза самолёт Корейских Авиалиний с 269 пассажирами на борту был сбит из-за дезориентации экипажа в пространстве, президент США Рональд Рейган с целью не допустить в будущем подобные трагедии разрешил частичное использование системы навигации для гражданских целей.
Во избежание применения системы для военных нужд точность была уменьшена специальным алгоритмом. Затем появилась информация о том, что некоторые компании расшифровали алгоритм уменьшения точности на частоте L1 и с успехом компенсируют эту составляющую ошибки. В 2000 г. это загрубление точности отменил своим указом президент США Билл Клинтон. Спутниковая группировка системы NAVSTAR обращается вокруг Земли по круговым орбитам с одной высотой и периодом обращения для всех спутников. Круговая орбита с высотой порядка 20200 км. является орбитой суточной кратности с периодом обращения 11 часов 58 минут; таким образом, спутник совершает два витка вокруг Земли за одни звёздные сутки (23 часа 56 минут). Наклонение орбиты (55°) является также общим для всех спутников системы. Единственным отличием орбит спутников является долгота восходящего узла, или точка, в которой плоскость орбиты спутника пересекает экватор: данные точки отстоят друг от друга приблизительно на 60 градусов. Таким образом, несмотря на одинаковые (кроме долготы восходящего узла) параметры орбит, спутники обращаются вокруг Земли в шести различных плоскостях, по 4 аппарата в каждой.
1.2 Однокристальные микро ЭВМ. С появлением однокристальных микро-ЭВМ связывают начало эры массового применения компьютерной автоматизации в области управления. По-видимому, это обстоятельство и определило термин «контроллер» (англ. controller — регулятор, управляющее устройство). В связи со спадом отечественного производства и возросшим импортом техники, в том числе вычислительной, термин «микроконтроллер» (МК) вытеснил из употребления ранее использовавшийся термин «однокристальная микро-ЭВМ». Первый патент на однокристальную микро-ЭВМ был выдан в 1971 году инженерам М. Кочрену и Г. Буну, сотрудникам американской Texas Instruments. Именно они предложили на одном кристалле разместить не только процессор, но и память с устройствами ввода-вывода.В 1976 году американская фирма Intel выпускает микроконтроллер i8048. Через 4 года, в 1980 году, Intel выпускает следующий микроконтроллер: i8051. Удачный набор периферийных устройств, возможность гибкого выбора внешней или внутренней программной памяти и приемлемая цена обеспечили этому микроконтроллеру успех на рынке. С точки зрения технологии микроконтроллер i8051 являлся для своего времени очень сложным изделием — в кристалле было использовано 128 тыс. транзисторов, что в 4 раза превышало количество транзисторов в 16-разрядном микропроцессоре i8086. На сегодняшний день существует более 200 модификаций микроконтроллеров, совместимых с i8051, выпускаемых двумя десятками компаний, и большое количество микроконтроллеров других типов. Популярностью у разработчиков пользуются 8-битные микроконтроллеры PIC фирмы Microchip Technology
и AVR фирмы Atmel, 16-битные MSP430 фирмы TI, а также 32-битные микроконтроллеры, архитектуры ARM, которую разрабатывает фирма ARM Limited и продаёт лицензии другим фирмам для их производства. Несмотря на популярность в России микроконтроллеров упомянутых выше, по данным Gartner Grup от 2009 года мировой рейтинг по объему продаж выглядит иначе первое место с большим отрывом занимает Renesas Electronics на втором Freescale, на третьем Samsung, затем идут Microchip и TI, далее все остальные. В СССР велись разработки оригинальных микроконтроллеров, также осваивался выпуск клонов наиболее удачных зарубежных образцов. В 1979 году в СССР НИИ ТТ разработали однокристальную 16-разрядную ЭВМ К1801ВЕ1, микроархитектура которой называлась «Электроника НЦ».
1.3 Однокристальные микро ЭВМ КМ1827ВЕ3, КМ1827ВЕ4. Однокристальные микро ЭВМ КМ1827ВЕ3, КМ1827ВЕ4 предназначены для цифровой обработки сигналов звуковоно диапазона частот в реальном масштабе времени. Микросхемы выполнены по n-МОП технологии с проэктными нормами 2 мкм и имеют одинаковую архитектуру. Различия заключаются в реализации ПЗУ каманд (IROM) и ПЗУ данных (DROM). Микросхема КМ1827ВЕ3 имеет внутреннюю масочную память данных и команд, программируемую при изготовлении, а КМ1827ВЕ-внешие ПЗУ, программируемую пользователем. БИС обрабатывают 16-разрядные числа, представленные в дополнительном коде, с фиксированной запятой после старшего разряда. Диапазон представления положительных чисел от 0 до 1-

, отрицательных-от- 1до -
. Сопряжение БИС с внешним устройством осуществляется посредствам программируемых 8/16-разрядных параллельного и последовательного портов ввода-вывода. Параллельный порт согласуется по сигналам интерфейса с универсальными микропроцессорами серий К590, К1810, К1816 и К1821. Микросхема KMI827BE3 с масочными IROM и DROM предназначена для построения цифровых устройств обработки сигналов и применяется в радиоэлектронной аппаратуре различного назначения (модемах, вокодерах и т. п.) с большой серийностью производства.. Структурно микросхема KMI827BE3 состоит из следующих функциональных узлов: матричного умножителя (Multiplier); арифметико-логического устройства (ALU); двухпортового ОЗУ (RAM); двух масочных ПЗУ (IROM и DROM); четырехуровневого стека S;
блоков обработки прерываний (I NT) и прямого доступа в память (DMA); двух аккумуляторов (АССА и АССВ); последовательного (S1/S0) и параллельного портов (DR/SR) ввода-вывода; вспомогательных регистров SGN, TR, К, L, Buffer RO FLAG A, FLAG В, Shift. 1.4 Принцип работы микросхемы КМ1827ВЕ3. Арифметико-логическое устройство реализует 15 арифметических и логических операций над двумя операндами, один из которых загружен в соответствующий аккумулятор АССА или АССВ, а второй через четырехканальный мультиплексор МРХ подается на вход Р ALU. Результат операции ALU загружается в тот аккумулятор, содержимое которого участвовало в данной операции. Операнды могут быть загружены в АССА или АССВ непосредственно с внутренней шины данных (ВШД) микроЭВМ или с выхода блока ALU. Источниками второго операнда для ALU, подключаемыми к его входч И через мультиплексор МРХ. могут быть выходные регистры М и N умножителя (Multiplier) ВШД, RAM или выход сдвигателя Shift.Состояние ALU в процессе обработки информации отображается в двух шестиразрядных флаговых регистрах FLAG А и F'LAG В, относящихся к соответствую- uiHM аккумуляторам. Значения флаговых регистров могут измениться в конце цик ла команды процессора, содержащей операцию ALU. Арифметико-логическое устройство выполняет следующие операции: лог. ИЛИ (OR), лог. И. (AND), лог. Исключающее ИЛ И (XOR), вычитание (SUB), сложение (ADD), вычитание с учетом заем a (SB В), сложение с учетом переноса (A DC), а также операции над содержимым любого аккумулятора, такие как увеличение на 1 (INC). уменьшение на 1 (DEC); сдвиг на один разряд вправо (SHR 1), сдвиг на I разряд влево (SHL I), сдвиг на 2 разряда влево (SHL 2), сдвиг на 4 разряда влево (SHL 4), восьмиразрядная перестановка (XCHG) и инверсия (СМР). Матричный умножитель (Multiplier) оперирует двумя 16-разрядными числами, представленными в дополнительном коде и находящимися в буферных регистрах К и L; 31 -разрядный результат умножения, также представленный в дополнительном коде, записывается в выходные регистры умножителя М и N. Старшая часть произведении (знак и 15 старших разрядов) фиксируется в регистре М, а младшая — в регистре N. Операция умножения выполняется в каждом цикле операционных команд микро ЭВМ. Структурная схема показана на рисунке 1. Память микросхемы КМ1827ВЕЗ состоит из масочного ПЗУ IROM команд, масочного ПЗУ данных DROM и двухпортового ОЗУ — RAM.
ПЗУ команд предназначено для хранения программы работы и адресуется девятиразрядным программным счетчиком PC, содержимое которого в конце каждого командного цикла увеличивается на 1, за исключением следующих случаев: при
выполнении команд вызова подпрограммы, безусловного или условного переходов в PC записывается значение адреса перехода или начального адреса подпрограммы;при прерывании работы микросхемы внешним устройством в PC записывается адрес 100Н, а текущее состояние PC заносится в верхний уровень стека S. ПЗУ данных DROM адресуется девятиразрядным счетчиком адреса RP. Для записи и хранения данных можно использовать все адресное пространство DROM, за исключением адресов ООО и 001. Данные из DROM через выходной буферный регистр Buffer могут быть выведены на ВШД или по специальной шине загружены в регистр L умножителя. Текущее состояние счетчика RP может программно уменьшаться на I или оставаться неизменным. ОЗУ данных (RAM), структурная схема которого приведена на рис. 2, состоит из двух блоков памяти (RAMI и RAM2), буферного усилителя R, мультиплексора МРХ, буферного регистра чтения/записи R/W, двух шинных формирователей(ШФ1, ШФ2) и регистра-указателя адреса DP. Каждый блок ОЗУ разделен на четыре строки по 16 слов в каждой. Адресация RAM осуществляется
семиразрядным регистром DR, старший разряд которого выбирает один из блоков RAM I или RAM2. Следующие два разряда регистра DP
указывают номер строки в пределах блока, а оставшиеся четыре младших разряда — номер ячейки в строке. Такая организация RAM позволяет осуществлять одновременную загрузку регистров К и L умножителя операндами, считываемыми из блоков RAMI и RAM2. Состояние младшей четырехразрядной части DPI регистра DP может программно изменяться, увеличиваясь или уменьшаясь на 1, сбрасываться в нуль или оставаться неизменным. Состояние
старшей трехразрядной части DPh регистра DP может быть программно модифицировано в результате поразрядной операции Исключающее ИЛИ между текущим состоянием DPh и числом, в явном виде заданным в поле DPhM операционных команд микроЭВМ. Набор внутренних регистров микросхемы содержит регистры общего назначения SON и TR, флаговые регистры FLAG А и FLAG В, регистры последовательного ввода SI и вывода SO данных, регистр данных параллельного порта DR и регистр состояний SR, отображающий состояние БИС в процессе обработки информации.

Разряды флаговых регистров FLAG А и GI.AG В имеют специальное обозначение и выполняют следующие функции: СА (СВ) — запоминает перенос из старшего (знакового) разряда числа при выполнении в ALU арифметических операций или значение старшего (младшего) разряда при выполнении некоторых сдвигов; ZA (ZB) — принимает значение I при наличии в соответствующем аккумуляторе числа ООО Н и значение 0 в противном случае; SAO(SBO) — состояние этого разряда идентично состоянию старшего разряда числа, находящегося в соответствующем аккумуляторе; OUAO (OUB0) — запоминает результат логической операции Исключающее ИЛИ между значениями переносов из двух старших разрядов ALU при выполнении арифметических операций (при переполнении ALU состояние OUAO(OUBO)равно 1); OUA1 (OUB1) — индикатор переполнения, возникающего в ALU при выполнении арифметических операций с участием содержимого соответствующего аккумулятора; SA1 (SB1) — знаковый разряд, по состоянию которого можно сулить о знаке переполнения.Регистр знака SGN служит для хранения числа +1 или —1 в зависимости от состояния разряда SAI (SB 1) флагового регистра.
Регистр общего назначения TR связан непосредственно с ВШД и предназначен для временного хранения операндов и
промежуточных результатов'вычислений. Назначение ножек приведены в таблице 1.
| Параметры
| Значение параметров
|
| Разрядность, бит
Данных
Результата умножения
Портов ввода-вывода
|
8/16
|
| Цикл команд, нс
|
|
| Организация памяти, бит
ПЗУ команд
ПЗУ констант
ОЗУ данных стека
|
512  512
512  128
128 
|
| Тактовая частота, МГц
| 6,5
|
|
Арифметических
Переходов и загрузки
|
|
Параллельный обмен информацией между микросхемой и.внешними устройствами реализуется с помощью регистров DR и SR в режимах побайтовой загрузки данных или прямого доступа в память(ПДП). В последнем случае БИС подключается к внешнему процессору через контроллер ПДП.
Специальная часть.
2.1Классификация регистров сдвига. Регистром называется устройство, предназначенное для приема, временного хранения, преобразования и выдачи n-разрядного двоичного кода. Регистры представляют собой, несколько D-триггеров, соединенных между собой тем или иным способом. На схемах регистры обозначаются буквами RG. В отечественных сериях микросхем регистрам соответствуют буквы ИР. Все регистры делятся на две большие группы: параллельные регистры и регистры сдвига (или сдвиговые регистры). Регистры с последовательным приемом или выдачей информации называются сдвиговыми регистрами, или регистрами сдвига. Регистры сдвига могут выполнять функции хранения и преобразования информации. Они могут быть
использованы при построении умножителей и делителей чисел двоичной системы счисления, так как сдвиг двоичного числа влево на один разряд соответствует умножению его на два, а сдвиг вправо – делению на два. Регистры сдвига широко используются при выполнении различных временных преобразований цифровой информации – последовательное накопление цифровой информации, с последующей одновременной выдачей (преобразование последовательной цифровой информации в параллельный код) или одновременный прием (параллельный прием) информации с последующей последовательной выдачей (преобразование параллельного кода в последовательный). Регистры сдвига могут служить также в качестве элементов задержки сигнала, представленного в цифровой форме. Действительно, регистры с последовательным приемом (вводом) и выводом осуществляют задержку передачи информации на m+1 тактов (m+1 – число разрядов регистра) машинного времени.Регистры сдвига обычно реализуются на D-триггерах или на RS-триггерах, где для ввода информации в первый разряд включается инвертор (первый разряд представляет собой D-триггер). Следует отметить, что все регистры сдвига строятся на базе двухступенчатых триггеров или синхронизируемых фронтах синхроимпульса. Разрядность регистров сдвига, как и у регистров хранения, определяется количеством триггеров, входящих в их состав. В некоторых сдвиговых регистрах сдвиг происходит не только в одну сторону, а и влево и вправо - это так называемые реверсивные регистры. Чтобы обеспечить реверс сдвига и параллельную запись сразу во все триггеры к D-входу каждого i-того триггера подключён мультиплексор, который при подаче «1» на один из управляющих входов - SL(ShiftLeft - сдвиг влево), SR(ShiftRight - сдвиг вправо) или PL(Parallelload - параллельная загрузка) подключает вход i-того триггера соответственно к выходу младшего соседа (направление A), старшего
соседа (направление B) или к выходу параллельной загрузки Di.Точка A самого младшего триггера (разряда) является входом DR, точка В самого старшего разряда - входом DL (входы DL и DR используются для наращивания разрядности реверсивных регистров). Выход i-го триггера подключён к соответствующим входам мультиплексоров соседних разрядов. По С-сигналу триггеры регистра принимают информацию с направлений, диктуемых мультиплексорами. Регистры сдвига находят применение в качестве счетчиков особого вида, называемых кольцевыми счетчиками. Подобный счетчик представляет собой регистр, у которого информационный вход триггеров D-типа (или оба входа JK- или RS-триггеров в случае их применения) соединен с выходом (или с обоими выходами) последней ступени, образуя замкнутое кольцо. Регистры сдвига (РС) широко применяются в информационных цифровых устройствах. Например, в калькуляторах, где при наборе каждой новой цифры на клавиатуре, числа на индикаторе сдвигаются влево. Регистры сдвига применяют в качестве запоминающих устройств, качестве преобразователей последовательного кода в параллельный, в качестве устройств задержки и счётчиков импульсов (правда, применение сдвигающих регистров в качестве счётчиков достаточно неэкономично). Существуют регистры и других типов, но они применяются гораздо реже, чем параллельные и сдвиговые, так как имеют узкоспециальное назначение. В параллельных регистрах каждый из триггеров имеет свой независимый информационный вход и свой независимый информационный выход. Тактовые входы всех триггеров соединены между собой. В результате параллельный регистр представляет собой многоразрядный, многовходовый триггер. В сдвиговых регистрах все триггеры соединены в последовательную цепочку. Тактовые входы всех триггеров объединены между собой. В результате такой триггер может рассматриваться как линия задержки, входной сигнал которой последовательно перезаписывается из триггера в триггер по фронту тактового сигнала. Информационные входы и выходы триггеров могут быть выведены наружу, а могут и не выводиться - в зависимости от функции, выполняемой регистром. Параллельные регистры, в свою очередь, делятся на две группы: регистры, срабатывающие по фронту управляющего сигнала С (или тактируемые регистры) и регистры, срабатывающие по уровню управляющего сигнала С (или стробируемые регистры). Чаще всего в цифровых схемах используются регистры, управляемые фронтом (то есть тактируемые), однако и стробируемые регистры имеют свой круг задач, в которых их ничто не может заменить.

 2.2 Регистр сдвига К1533ИР8.
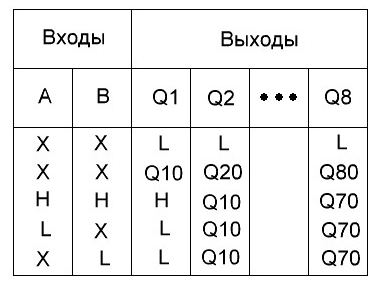
2.2 Регистр сдвига К1533ИР8. Микросхема КР1533ИР8 представляет собой восьми разрядный сдвиговый регистр на n-МОП структуре с последовательной загрузкой и параллельной выгрузке. Условное графическое обозначение показано на рисунке 3,назначение выводов приведено в таблице 2, таблица истинности таблица 3.
Таблица истинности представляет собой значение выходов от входов, а так же показывает процесс работы регистра.
2.3 Принцип работы К1533ИР8 К1533ИР8-построена на D триггерах которые соединены таким образом, что каждый последующий сигнал поступает с выхода предыдущего. Наличие двух входов последовательной загрузки А и В позволяет использовать один из них в качестве управляющего загрузкой данных: низкий уровень напряжения хотя бы одного из них по положительному фронту тактового импульса устанавливает первый триггер регистра в
состояние низкого уровня напряжения, в то же время высокий уровень напряжения на
управляющем входе позволяет по другому входу осуществлять ввод данных в последовательном коде. Низкий уровень напряжение на входе R асинхронно устанавливает все выходы микросхемы в состояние низкого уровня напряжения. Структурная схема показана на рисунке 4.

Данная схема выполнена с соблюдением ГОСТА.
2.4 Электрические параметры ниже приведены электрические параметры микросхемы К1533ИР8.
Выходное напряжение низкого уровня  ………………………………………………0,4
………………………………………………0,4
Выходное напряжение высокого уровня  …………………………………………….2,5
…………………………………………….2,5
Напряжение питания  …………………………………………………………………...+5
…………………………………………………………………...+5
Ток потребления  ,мА………………………………………………………………………24
,мА………………………………………………………………………24
Входной ток низкого уровня  мА...…………………………………………………..…
мА...…………………………………………………..… 
Входной ток высокого уровня  мкА………………………………………………………...20
мкА………………………………………………………...20
Потребляемая мощность  ……………………………………………………………750
……………………………………………………………750
Частота  ,мГц…………………………………………………………………………………………………………………5
,мГц…………………………………………………………………………………………………………………5






