




Характеристики вращающего момента и мощности приводного мотора
Характеристики вращающего момента и мощно* сти четырех типов приволкых мотороп представ лены на рис. I7.I7. Эти четыре графики показы вают врашакшшн момент н мощность привода как функции скорости вращения. Существенная часть работы при конструирова нии EV — это выбор приводного мотора(ов) и схе ма, в которой он обеспечит нужные показатели качества в сочетании с батареями и массой транс портного средства.

Методы оптимизации - математическое моделирование
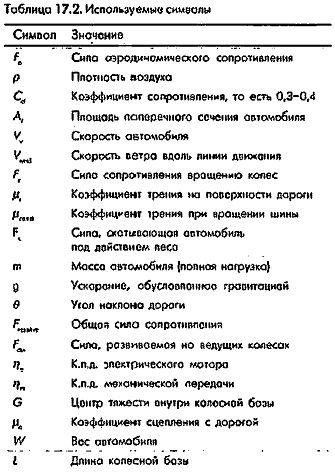
Влияние конструктивных параметров на работу электромобиля может быть смоделировано матема тически. Этот раздел представляет некоторые из ос новных приемов моделирования. На рис. 17.18 и в табл. 17.2 поясняются используемые символы.




Возможны и другие вычисления, чтобы провес ти более легальное моделирование. Если ухватить суть подхода, то это поможет сэкономить огром ное количество времени и денег в процессе раз работки.- Представленная здесь информация за имствована из превосходного исследовательского отчета: SAE paper 940336.
Новые разработки в области электромобилей
Двигатели 8 колесах - GM
Инженеры компании GM разработали потенци ально выдающуюся технологию, названную «мо торами на осях колес». Ее развитие могло бы принципиально помочь потребителям принять передовые технологии транс портных средств. Два мотора на осях колес сзади переднеприводного транспортного средства с че тырьмя цилиндрами MOiyr увеличить вращающий момент при старте до 60%. Кроме того, дополни тельный вращающий момент появляется немедлен но. Это означает, что четмрехиилшшронмй дви гатель мог бы быть выполнен с характеристиками двигателя с шестью цилиндрами. Моторы на осях колес развивают мощность примерно ло 25 кВт и весят IS кг каждый. Традиционные транспортные средства передают энергию от двигателя к колесам посредством ме ханизма сцепления, коробки передач и карданных налов. Более 10% мощности, производимой дви гателем, теряется в этом процессе. Система GM использует гибридное электрическое транспорт ное средство, чтобы сгенерировать электроэнер гию, которая направляется непосредственно к моторам. Это минимизирует объем потеря иной энергии. Моторы на осях колес создают ярлшшо- щнй момент, который доступен мгновенно и пол ностью, тогда как обычным двигателям требуется время, чтобы разогнаться. Моторы на осях колес, помимо этого, позволя ют создать более высокий уровень тяги и контро ля проскальзывания колес, улучшить руление и показатели работы транспортного средства. Спо собность управлять каждым колесом отдельно со значительно лучшей реакцией, чем это могут сде лать существующие системы управления тягой, приносит дополнительные выгоды. 1!апример. по павший в грязь автомобиль будет легко сдвинуть с места достаточно применить тяговое усилие к шине, которая имеет сцепление с дорогой!
Инфраструктура водорода
Одним из видов «топлива будущего* является водо родом, потому что он производит нулевую эмиссию, особенно когда используется в гошшвных элементах. Число эксплуатируемых транспортных средств на базе топливных элементов из числа вссх выпу щенных скоро (книга написана в 2003 г.), как
ожидается, достишег одного миллиона1. Эти транс портные средства, прежде всего, будут эксплуатиро ваться в США и Канаде, но и Европа не намного позади. Подходящая инфраструктура заправки водо родом скоро станет совершенно необходимой. Для того чтобы расширить рынок транспортных средств на основе топливных элементов, должна сушесгвовагь стабильная поддержка со стороны правительства созданию инфраструктуры водород ного питания. По оценкам, Калифорния, ведущий в отношении чистоты воздуха штат США, будет нуждаться к 2015 г, где-то в 1900 станциях заправки водородом. Трудно предсказать, как быстро транспортные средства с топливными элементами окажутся иа потребительском рынке. Вероятно, что они будут сначала востребованы некоторыми нетерпеливыми клиентами. Однако интересно отмстить, что разви тие технологии транспортного средства - только залог успеха. Если нигде нет удобного места для заправки горючим, тогда потребители (вы, и я) ни чего менять не будем!



