




—игнал с внутриимпульсной частотной модул€цией Ц это радиоимпульс, высокочастотное заполнение которого имеет переменную частоту.
–ис. 5.14 Ћ„ћ Ц сигнал.
Ћ„ћ Ц сигналы
≈сли закон изменени€ мгновенной частоты заполнени€ имеет линейный характер, то такие сигналы нос€т название Ћ„ћ Ц сигналов (линейна€ частотна€ модул€ци€). Ќаиболее широкое применение они получили в радиолокации. ѕример Ћ„ћ Ц сигнала с огибающей пр€моугольной формы приведен на рис. 5.14
Ћ„ћ Ц сигналы имеют одно замечательное свойство. ≈сли сигнал подать на частотно-зависимую линию задержки, врем€ задержки сигнала которой велико на малых частотах (в начальной части Ћ„ћ Ц сигнала) и уменьшаетс€ по мере нарастани€ частоты в Ћ„ћ Ц сигнале, то на выходе такой линии происходит "сжатие" сигнала в один период высокочастотного колебани€ путем суммировани€ амплитудных значений всех периодов сигнала. ѕри этом происходит увеличение амплитуды выходного сигнала и уменьшение статистических шумов, так как суммируемые одновременно по этим же периодам шумы не коррелированны.
ƒл€ модели радиоимпульса с пр€моугольной огибающей примем его длительность равной tи, и точку t = 0 поместим в центр радиоимпульса. ƒопустим также, что частота заполнени€ линейно нарастает от начала импульса к его концу со скоростью m (с-2), при этом:
w(t) = wo + mt.
ƒевиаци€ частоты за врем€ длительности импульса и полна€ фаза сигнала:
Dw = m×tи.
y(t) = wot + mt2/2.
”равнение Ћ„ћ Ц сигнала:
u(t) = 
—пектр пр€моугольного Ћ„ћ Ц сигналавычисл€етс€ через преобразование ‘урье. ƒевиаци€ частоты за врем€ длительности импульса по сравнению с несущей частотой обычно мала (Dw << wo) и форма спектра зависит от так называемой базы импульса:
Dw×tи = m×tи2.
Ќа рис. 5.15 приведен пример формы спектральной плотности Ћ„ћ Ц сигнала при малом значении базы в области несущей частоты сигнала.
–ис.5.15 —пектр Ћ„ћ- сигнала. –ис. 5.16 —пектр при B>>1.
Ќа практике значение базы сигналов обычно много больше 1. ”величение базы сопровождаетс€ расширением полосы спектра Dw, при этом в пределах этой полосы модуль спектральной плотности практически посто€нен и равен Um×  . ѕример спектра приведен на рис. 5.16
. ѕример спектра приведен на рис. 5.16
»мпульсна€ модул€ци€
¬ импульсной модул€ции в качестве носител€ модулированных сигналов используютс€ последовательности импульсов, как правило Ц пр€моугольных. ¬ беспроводных системах передачи данных (в радиосв€зи) эти последовательности заполн€ютс€ высокочастотными колебани€ми, создава€ тем самым двойную модул€цию. ак правило, эти виды модул€ции примен€ютс€ при передаче дискретных данных. ƒл€ пр€моугольных импульсов наиболее широко используютс€ амплитудно-импульсна€ (ј»ћ) и широтно-импульсна€ (Ў»ћ) модул€ци€.
јмплитудно-импульсна€ модул€ци€ (ј»ћ) заключаетс€ в изменении приращени€ амплитуды импульсов пропорционально функции управл€ющего сигнала при посто€нной длительности импульсов и периоде их следовани€:
U(t) = Uo + kЈs(t), tи = const, T = const.
|
|
|
—пектр ј»ћ рассмотрим на примере модулировани€ однотонального сигнала s(t), приведенного на рис. 5.17
Ќапишем уравнение модулированного сигнала в следующей форме:
u(t) = (1+M cos Wt)Јf(t),
где f(t) Ц периодическа€ последовательность пр€моугольных импульсов с частотой wo, которую можно аппроксимировать р€дом ‘урье (без учета фазы):
f(t) = Uo +  Un cos nwot.
Un cos nwot.
получаем:
u(t) = (1+M cos Wt)Uo+ Un cos nwot Ј(1+M cos Wt) =
u(t) = Uo + UoM cos Wt + Un cos nwot +
+ 0.5M Un cos (nwo+W)t + 0.5M Un cos (nwo-W)t.
‘орма спектра, в начальной части спектрального диапазона, приведена на рис. 5.17. ¬ целом, спектр бесконечен, что определ€етс€ бесконечностью спектра пр€моугольных импульсов. ќколо каждой гармоники nwo спектра пр€моугольных импульсов по€вл€ютс€ боковые составл€ющие nwo±W, соответствующие спектру моделирующей функции (при многотональном сигнале Ц боковые полосы спектров). ѕри дополнительном высокочастотном заполнении импульсов весь спектр смещаетс€ в область высоких частот на частоту заполнени€.

–ис. 5.17
Ўиротно-импульсна€ модул€ци€ ( Ў»ћ, pulse width modulation, PWM), которую иногда называют модул€цией по длительности импульсов (ƒ»ћ), заключаетс€ в управлении длительностью импульсов пропорционально функции управл€ющего сигнала при посто€нной амплитуде импульсов и периоде следовани€ по фронту импульсов:
t(t) = to + kЈs(t), U = const, T = const.
–ассмотрим выполнение Ў»ћ на примере гармонического колебани€, приведенного на рис. 5.18
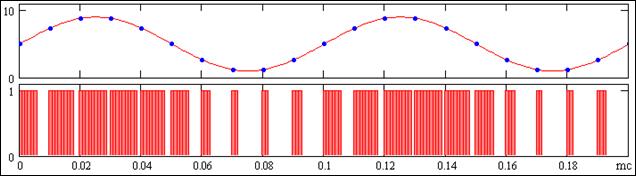
–ис. 5.18 Ўиротно-импульсна€ модул€ци€.
ѕередаваема€ крива€ дискретизируетс€, при этом имеет значение, как интервал дискретизации, так и количество уровней квантовани€. ѕри передаче данных пр€моугольные импульсы начинаютс€ в моменты дискретных отсчетов данных, а длительность импульсов устанавливаетс€ пропорциональной значению отсчетов, при этом максимальна€ длительность импульсов не должна превышать интервала дискретизации данных. ѕример сформированных импульсов приведен на рис. 5.18 непосредственно под дискретизированной гармоникой, при этом число уровней квантовани€ гармоники прин€то равным 8.

–ис. 5.19 —пектр Ў»ћ Ц сигнала. –ис. 5.20 ¬осстановленный сигнал.
Ќа рис. 5.20 приведен спектр сформированного сигнала Ў»ћ. ¬ начальной части спектра он содержит посто€нную составл€ющую среднего уровн€ сигнала и пик частоты гармоники, закодированной в Ў»ћ Ц сигнале. ≈сли выделить из спектра эти две составл€ющие, то восстанавливаетс€ исходный сигнал с погрешностью квантовани€, приведенный на рис. 5.20 ≈стественно, что при малом числе уровней квантовани€ погрешность восстановлени€ исходного гармонического сигнала очень велика.
ѕопутно заметим, что широтно-импульсна€ модул€ци€ с последующим выделением посто€нной составл€ющей может весьма эффективно использоватьс€ (и используетс€) дл€ слежени€ за средним уровнем сигнала и автоматического регулировани€ его динамического диапазона, как, например, в системах установки громкости звука и €ркости цветов и изображени€ в целом в современных телевизионных установках.
¬ременна€ импульсна€ модул€ци€ (¬»ћ) представл€ет собой девиацию импульсов по временной оси по закону модулирующего сигнала, и по существу аналогична угловой модул€ции гармонической несущей. ќна также может быть фазовой (‘»ћ) или частотной („»ћ).
одоимпульсна€ модул€ци€ ( »ћ) заключаетс€ в том, что в точках дискретизации модулирующего сигнала производитс€ квантование его значений и кодирование квантованных значений, как правило, в двоичной системе исчислени€. одированные значени€ затем передаютс€ при помощи соответствующей кодовой последовательности стандартных символов.
|
|
|
ћетоды демодул€ции
6.1 6.1
много сложнее демодул€ции сигналов јћ.
ѕри демодул€ции полностью зарегистрированных цифровых сигналов обычно используетс€ метод формировани€ комплексного аналитического сигнала с помощью преобразовани€ √ильберта:
ua(t) = u(t) + juh(t),
где uh(t) Ц аналитически сопр€женный сигнал или квадратурное дополнение сигнала u(t), которое вычисл€етс€ сверткой сигнала u(t) с оператором √ильберта (1/πt):
uh(t) = (1/π)  u(t') dt'/(t-t').
u(t') dt'/(t-t').
ѕолна€ фаза колебаний представл€ет собой аргумент аналитического сигнала:
y(t) = arg(ua(t)).
ƒальнейшие операции определ€ютс€ видом угловой модул€ции. ѕри демодул€ции ‘ћ сигналов из фазовой функции вычитаетс€ значение немодулированной несущей ωоt:
j(t) = y(t) - ωot.
ѕри частотной модул€ции фазова€ функци€ дифференцируетс€ с вычитанием из результата значени€ частоты ωо:
j(t) = y(t)/dt - ωo.
¬ принципе, данный метод может примен€тьс€ и в реальном масштабе времени, но с определенной степенью приближени€, поскольку оператор √ильберта слабо затухает.
ќбычно в реальном масштабе времени используетс€ квадратурна€ обработка, при которой входной сигнал умножаетс€ на два опорных колебани€ со сдвигом фазы между колебани€ми в 90о:
u1(t) = u(t) cos(ωot) = Um cos(ωot+j(t) cos(ωot) = ½ Um cos j(t) + ½ cos(2wot+j(t)),
u2(t) = u(t) sin(ωot) = Um cos(ωot+j(t) sin(ωot) = - ½ Um sin j(t) + ½ sin(2wot+j(t)).
»з этих двух сигналов фильтрами низких частот выдел€ютс€ низкочастотные колебани€, и формируетс€ аналитический сигнал:
ua(t) = ½ Um cos j(t) - ½j Um sin j(t).
јргумент этого аналитического сигнала, как и в первом случае, представл€ет полную фазу колебаний, обработка которой выполн€етс€ аналогично.

