




Розглянемо приклад застосування мереж Петрі для внутрішньоцехового планування. Метою планування на внутрішньоцеховому рівні є отримання плану, оптимального з точки зору часу обробки однієї партії деталей та зведення до мінімуму міжопераційного очікування матеріалів при рівномірному завантаженні обладнання.
Для зручності планування робочі центри поєднуються в групи. На чолі кожної такої групи постає головний робочий центр. Робочі центри, що входять у групу називають підлеглими робочими центрами. У якості головних робочих центрів приймаємо кластерне встаткування цеху, а виробничі ділянки, що входять у цехи приймемо за підлеглі робочі центри. При розробці технологічного маршруту необхідно враховувати наявність транспортних зв'язків й їхні часи на кожному рівні робочого центру.
Розроблені на основі мереж Петрі методики дозволяють спростити аналіз й обробку інформації внаслідок подання взаємозв'язку транспортної системи відповідно до ієрархії робочих центрів. Методики застосовні для формування транспортних зв'язків між складською системою й робочими ділянками.
При аналізі автоматизованого виробництва було виявлено, що основними одиницями, при виготовленні продукції, на рівні ділянки, є: верстати, накопичувачі, транспортні засоби, склад на рівні ділянки.
Деталі для подальшої обробки потрапляють з іншого цеху партіями на ділянку та складуються у приймальному накопичувачі. У ділянку входять 2 слюсарні верстати, на яких деталі оброблюються тими самими партіями, після чого вони передаються до одного шліфувального верстата. Транспортний засіб єдиний на ділянці та здійснює доставку партій деталей з приймального накопичувача до слюсарних верстатів, від слюсарних до шліфувального та від шліфувального верстата до вихідного складу.
Отже у модель роботи цієї ділянки слід виокремити позиції, що представляють стан верстата (вільний, зайнятий обробкою деталей), стан транспортного засобу (вільний, зайнятий доставкою), приймальний накопичувач, вихідний склад.
Переходи моделі відображують здійснення операцій доставки деталей (до слюсарних верстатів, між слюсарними та шліфувальним верстатом, від шліфувального до вихідного складу) та операції обробки деталей (слюсарна обробка та шліфування), додатковий перехід вертає транспортний засіб на місце, тобто вивільняє його.
Отже, множина позицій моделі:
{Zakazy; St 1 svob; Det 1 gotova; St 3 svob; Det poln got; Transport; Vypolneno; P10; St 2 svob; Det 2 gotova}
множина переходів:
{W1; W3; Vzyat Zakaz; Trans gotovogo; Zagr 2; Vozvrat; W2; Zagr 3; Vzyat Zakaz 2}
матриця інциденцій має вид (рядки відповідають позиціям, стовпці – переходам у тому порядку, як вони перелічені вище):
(0 0 1 0 0 0 0 0 0)
(1 0 -1 0 0 0 0 0 0)
(-1 0 0 0 1 0 0 0 0)
(0 1 0 0 -1 0 0 -1 0)
(0 -1 0 1 0 0 0 0 0)
(0 0 1 1 1 -1 0 1 1)
(0 0 0 -1 0 0 0 0 0)
(0 0 -1 -1 -1 1 0 -1 -1)
(0 0 0 0 0 0 1 0 -1)
(0 0 0 0 0 0 -1 1 0)
Для побудови та аналізу моделі виробничої ділянки за допомогою мереж Петрі застосуємо один з інструментальних засобів моделювання таких мереж – вільно розповсюджуване програмне забезпечення HPSim (розробка Henryk Anschuetz, 1999-2000). Загальний вигляд вікна програми показано на рис. 17.
Структура вікна типова для середовища Windows: рядок меню, горизонтальна панель інструментів, вертикальна панель інструментів, вікно моделі, вікно огляду властивостей елементів моделі, рядок стану. Під час імітації активуються також додаткові вікна, у яких відбуваються можливі та здійсненні операції на кожному кроці.

Рис. 17. Загальний вигляд вікна HPSim.
Для побудови моделі необхідно скористатися боковою панеллю інструментів, показаною на рис. 18.
 |

Рис. 18. Панель інструментів, яка містить елементи мережі Петрі.
Вставимо позицію «Zakazy», яка відповідає наявность партій деталей для обробки. Для цього натиснемо кнопку «Place» (вона залишиться натиснутою доки не буде обрано щось інше) та вкажемо кнопкою миші у вікні моделі місце, де має знаходитися ця позиція. Позиціям та переходам автоматично надаються імена Pi, Tj, де i, j – порядкові номера позицій та переходів. Зміна імені та інших властивостей здійснюється у вікні вікно огляду властивостей позиції, яке показано на рис. 19.
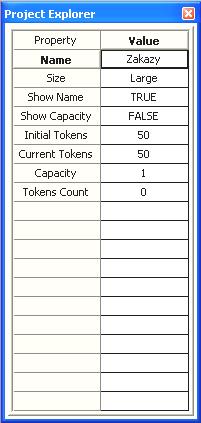
Рис. 19. Вікно огляду властивостей позиції моделі.
На рис. 19 показано параметри, які мають бути задані для позиції наявності партій: початкова кількість партій становить 50, відображення місткості позиції не потрібне (False).
Так само встановлюємо й решту позицій моделі, при цьому для позиції, яка відбиває наявність вільного транспорту (Transport) початкове маркування дорівнює одиниці, для решти – нулю.
Для встановлення переходів натиснемо кнопку «Transition» на панелі інструментів (рис. 18) та вкажемо місця розташування у моделі усіх переходів. Властивості переходів показано на рис. 20.
Для переходу можна задавати час затримки (час здійснення) переходу у одиницях часу. Після того, як цей час сплине перехід буде обрано для здійснення. Можливе встановлення таких видів затримки: миттєвий перехід (Immediate), детермінований час (Deterministic), за експоненційним законом розподілу (Exponential Distribution) та рівномірним законом розподілу (Uniform Distribution). Детермінований час встановлюється параметром Initial Delay як однаковий для усіх здійснень переходу. Той самий параметр визначає середній час для експоненційного розподілу. Для рівномірного розподілу нижня границя визначаються параметром Initial Delayа верхня – параметром Range Delay. Випадкові затримки у здійснення переходів розраховуються за допомогою вбудованих генераторів випадкових чисел.


Рис. 20. Вікно властивостей переходу.
Встановлюємо усі перелічені вище переходи, при цьому для переходу Vozvrat (вивільнення транспорту) час затримки нульовий (Immediate), для решти переходів – детермінований час затримки, а саме для переходів, які відповідають за транспортування партії до слюсарних верстатів – Vzyat Zakaz, Vzyat Zakaz 2 - 1 одиниця часу, для переходів обробки партії на слюсарному верстаті W1, W2 – 5 одиниць, для переходів транспортування партії від слюсарного верстата до шліфувального – Zagr 2, Zagr 3 – 2 одиниці, для обробки на шліфувальному верстаті – W3 – 10 одиниць, для переходу транспортування готової партії деталей до вихідного складу – Trans gotovogo – 1 одиниця. Також для переходів, які відбивають обробку деталей встановимо параметр відображення часу затримки – True.
Після встановлення усіх позицій та переходів їх необхідно з’єднати дугами. Для цього натиснемо кнопку Arc на панелі інструментів (рис. 18). Для з’єднання двох елементів необхідно натиснути кнопку миші на елементі-початку дуги та, утримуючи її натиснутою, довести дугу до елементу-кінця й відпустити кнопку миші. Дуги, так само як і позиції та переходи, мають свої властивості, які показано на рис. 21.




Рис. 21. Властивості дуг.
Для усіх луг встановлюємо одиничну вагу та нормальний тип дуги.
Готова модель показана на рис. 22, двома контурами показано дві стадії обробки деталей.

Рис. 22. Модель виробничої ділянки з трьома верстатами.
Для пояснення окремих елементів моделі можна додавати графічні об’єкти за допомогою бокової панелі інструментів: лінія (Line), замкнена фігура (Polygon), прямокутник (Rectangular), текстове поле (Text), для яких також задаються властивості.
Після побудови моделі можна перейти до її запуску. Управління імітацією здійснюється за допомогою панелі інструментів Simulation Bar, яка показана на рис. 23, або командами з позиції меню Simulation.

 | |||
 | |||
Рис. 23. Панель інструментів управління імітацією.
Натиснемо кнопку початку імітації. У вікні програми з’являється нове вікно статусу (стану імітації), яке показано на рис. 24. У цьому вікні відбиваються загальні властивості моделі (кількість позицій та

Рис. 24. Вікно статусу.
переходів), часовий інтервал (1 мс), обмеження імітації (1000 мс або 1000 кроків), попередження про можливі конфлікти переходів. У даному випадку 5 переходів претендують на один ресурс, їх перелік показано нижче.
Для здійснення одного кроку імітації натиснемо кнопку Step. У вікні статусу показано, що для двох переходів почато відлік часу затримки, ці переходи на схемі моделі показано жовтим кольором, рис. 25.
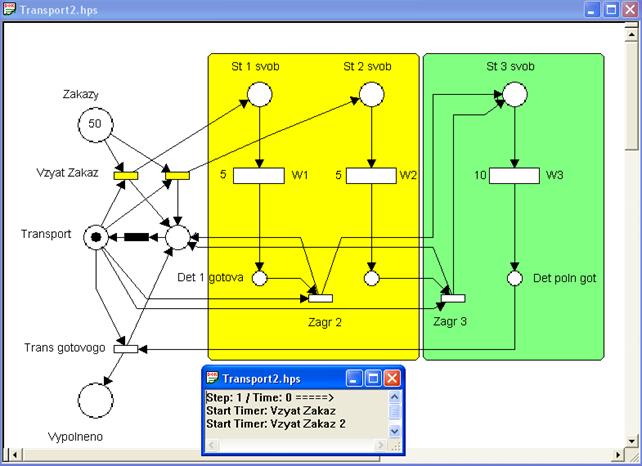
Рис. 25. Перший крок імітації.
Після кожного кроку імітації у вікні статусу відображається результат здійснення цього кроку. На рис. 26 показано результат другого кроку імітації.
Отже, на другому кроці з двох конкуруючих переходів було здійснено перехід Vzyat zakaz, що призвело до зменшення кількості фішок на одну у вхідних позиціях Zakazy і Transport, та збільшенні також на одну кількості фішок у позиції St 1 svob, яка відбиває початок обробки

Рис. 26. Результат здійснення другого кроку імітації.
партії деталей. Перехід, який відбувся на поточному кроці, помічається на схемі зеленим кольором. По закінченні імітації у вікні статусу відбивається причина закінчення: вичерпання часу (Time Limit reached), вичерпання кількості можливих кроків (Step Limit reached), неможливість здійснення жодного переходу (Deadlock at Time:).
Спостереження за ходом імітації дозволяє зробити висновок, що конфлікти між переходами, які відбивають конкуренцію щодо транспортування партії деталей, призводять до затримки у роботі слюсарних верстатів і страт виробничого часу.
За вихідних умов моделі імітація зупиняється через вичерпання кількості кроків, але при цьому 4 партії деталей все ще залишаються в обробці, тобто не поступають до вихідного складу. Отже, виконати виробниче замовлення за відведений час виявляється неможливо.
Для більш детального аналізу стану мережі на кожному кроці результати імітації можна зберегти у файлі формату MS Excel. Для цього перед початком імітації слід натиснути кнопку Output file на пенелі інструментів (рис. 23). У такому разі буде створено файл з ім’ям Name_OUT.csv, де Name – ім’я файлу HPSim, у якому зберігається модель, розширення.csv вказує на те, що роздільниками є коми. Як тільки імітацію закінчено для забезпечення доступу до вихідного файлу результатів слід «вивільнити» натиснуту кнопку Output file. Результати імітації можна переглянути у середовищі MS Excel. У табл. 3 показано результати здійснення перших кроків імітації роботи моделі.
Таблиця 3

