




Типовыми динамическими звеньями называются звенья, описываемые дифференциальными уравнениями не выше второго порядка.
Основными типовыми звеньями являются: пропорциональное, апериодическое, колебательное, дифференцирующее, интегрирующее и звено с чистым запаздыванием.
Звенья обладают направленным действием. Это значит, что сигнал через звено может проходить только в одном направлении – от входа к выходу. Любые изменения выходной величины звена не отражаются на его входной величине. Это позволяет рассматривать каждое звено отдельно, независимо от других звеньев.
Пропорциональное звено. Пропорциональным называется звено, у которого в каждый момент времени выходная величина пропорциональна входной величине.
Уравнение переходного процесса звена
 , (3.15)
, (3.15)
где  – коэффициент усиления (передачи) звена.
– коэффициент усиления (передачи) звена.
Переходная характеристика пропорционального звена представлена на рис. 3.12.
Рис. 3.12. Переходная характеристика пропорционального звена
При подаче на вход пропорционального звена ступенчатого сигнала  соответствующее значение выходной величины
соответствующее значение выходной величины  устанавливается мгновенно.
устанавливается мгновенно.
Передаточная функция звена
 . (3.16)
. (3.16)
Примером пропорционального звена может быть реостатный датчик, транзистор, работающий в режиме усиления, безлюфтовая зубчатая передача и др.
Апериодическое звено. Апериодическим (или инерционным) называется звено, в котором при скачкообразном (ступенчатом) изменении входной величины выходная величина стремится апериодически (по закону экспоненты) к новому установившемуся значению.
Уравнение переходного процесса апериодического звена
 , (3.17)
, (3.17)
где  – постоянная времени звена; – коэффициент передачи.
– постоянная времени звена; – коэффициент передачи.
Решение уравнения (3.17) имеет вид
 , (3.18)
, (3.18)
где  – основание натурального логарифма.
– основание натурального логарифма.
Переходная характеристика апериодического звена представлена на рис. 3.13.
 |
Рис. 3.13. Переходная характеристика апериодического звена
Величина может быть найдена как проекция касательной на линию установившегося значения. Кроме того, можно найти из свойства, что в момент времени  переменная должна иметь
переменная должна иметь  значение
значение
 (3.19)
(3.19)
Для большинства практических случаев можно считать, что переходный процесс в апериодическом звене заканчивается к моменту времени  .
.
Передаточную функцию апериодического звена можно получить из выражения (3.5)
 . (3.20)
. (3.20)
К апериодическим звеньям можно отнести большинство тепловых объектов, термопары, термометры сопротивления, магнитные усилители, электрические цепи с элементами R и L, R и С.
Колебательное звено. Колебательным называется звено, в котором при подаче на вход ступенчатого воздействия выходная величина стремится к установившемуся значению, совершая затухающие колебания.
Колебательное звено иначе называют двухъемкостным, т.е. оно должно содержать два элемента, способных запасать энергию или вещество и обмениваться этими запасами через третий элемент.
Дифференциальное уравнение колебательного звена:
 (3.21)
(3.21)
или в операторной форме
 , (3.22)
, (3.22)
где  – постоянная времени, характеризующая демпфирование (затухание) собственных колебаний звена;
– постоянная времени, характеризующая демпфирование (затухание) собственных колебаний звена;  – постоянная времени, характеризующая раскачивание собственных колебаний звена; – коэффициент усиления.
– постоянная времени, характеризующая раскачивание собственных колебаний звена; – коэффициент усиления.
Переходная характеристика колебательного звена представлена на рис. 3.14.
Следует иметь в виду, что не всякое уравнение второго порядка (3.21) выражает колебательный процесс.
Если  , то практически будет иметь место апериодический процесс (кривая 2). При таких параметрах и динамическое звено называют апериодическим звеном второго порядка.
, то практически будет иметь место апериодический процесс (кривая 2). При таких параметрах и динамическое звено называют апериодическим звеном второго порядка.
Если  , то будет иметь место колебательный процесс (кривая 1). Чем меньше отношение
, то будет иметь место колебательный процесс (кривая 1). Чем меньше отношение  , тем сильнее проявляются колебания.
, тем сильнее проявляются колебания.
Решение дифференциального уравнения для колебательного звена:
 , (3.23)
, (3.23)
где – постоянная времени, характеризующая длительность переходного процесса.
Величина может быть определена графически по кривой (рис. 3.14), как постоянная времени огибающей экспоненты.
 |
Рис. 3.14. Переходная характеристика колебательного звена
Аналитически величину можно определить по формуле
 ;
;  . (3.24)
. (3.24)
Постоянные времени и часто определяют по параметрам элементов колебательного звена.
Частота собственных колебаний звена
 . (3.25)
. (3.25)
Передаточная функция колебательного звена
 . (3.26)
. (3.26)
К колебательным звеньям относятся:
– электрическая цепь с последовательным соединением R, L и C;
– сообщающиеся сосуды;
– электродвигатели, способные запасать кинетическую энергию в якоре и электромагнитную в якорной цепи;
– механические элементы, обладающие массой, упругостью и вязким трением и др.
Например, для электрической цепи с последовательным соединением параметров R, L и C (рис. 3.15), постоянные времени и можно определить по формулам:
 |

 . (3.27)
. (3.27)
Рис. 3.15. Электрическая цепь с последовательным
соединением параметров R, L и C
Дифференцирующее звено. Это звено, у которого выходная величина пропорциональна скорости изменения входной величины. Как всякое реальное звено, дифференцирующее звено имеет инерционные свойства.
Дифференциальное уравнение звена (реального):
 . (3.28)
. (3.28)
Его решение
 , (3.29)
, (3.29)
где – постоянная времени звена; – коэффициент передачи.
Переходный процесс в дифференцирующем звене представлен на рис. 3.16.
Если инерционные свойства звена незначительны в сравнении с другими звеньями САР, то величину  опускают и получают уравнение идеального дифференцирующего звена
опускают и получают уравнение идеального дифференцирующего звена
 . (3.30)
. (3.30)
Передаточная функция реального звена:
 , (3.31)
, (3.31)
а идеального звена
 . (3.32)
. (3.32)
К дифференцирующим звеньям относятся: тахогенератор (датчик скорости), у которого – угол поворота вала, а – напряжение; пневматические и гидравлические успокоители; дифференцирующий трансформатор; цепь, состоящая из элементов R и C.
Дифференцирующие звенья находят широкое применение как составные элементы корректирующих устройств САР.
 |
Рис. 3.16. Переходная характеристика дифференцирующего звена
Интегрирующее звено. Это звено, у которого скорость изменения выходной величины пропорциональна входной величине.
Уравнение идеального интегрирующего звена
 . (3.33)
. (3.33)
Уравнение интегрирующего звена с учетом инерционных свойств
 . (3.34)
. (3.34)
Переходная характеристика интегрирующего звена представлена на рис. 3.17.
 |
Рис. 3.17. Переходная характеристика интегрирующего звена
Передаточные функции:
– идеального звена  ; (3.35)
; (3.35)
– звена с инерцией  , (3.36) где k - угловой коэффициент наклона касательной к оси абсцисс.
, (3.36) где k - угловой коэффициент наклона касательной к оси абсцисс.
Примерами интегрирующего звена являются: поршневой ИМ, у которого входная величина – перемещение плунжера золотникового устройства, а выходная – перемещение силового поршня; маломощный асинхронный двигатель с полым ротором; контур R – C, если  и др.
и др.
Звено с чистым запаздыванием. У звена с чистым запаздыванием выходная величина воспроизводит без искажения все изменения входной величины с некоторым постоянным запаздыванием  (рис. 3.18).
(рис. 3.18).
 |
Уравнение звена с чистым запаздыванием
 , (3.37)
, (3.37)
где – время запаздывания.
Передаточная функция звена
W (p) = e – τ· p. (3.38)
Примеры запаздывающего звена: транспортер, подающий груз от бункера к весам; трубопровод гидросистемы; длинные воздуховоды; реле, работающие в режиме усиления и др.

Рис. 3.18. Переходная характеристика звена с чистым запаздыванием
Способы соединения звеньев САР. Существует три основных типа соединения динамических звеньев: последовательное, параллельное и встречно-параллельное (или соединение с обратной связью) (рис. 3.19).
Приведенные передаточные функции соединений звеньев САР широко применяются для получения передаточной функции всей системы регулирования, которая в дальнейшем является исходной для оценки устойчивости и качества САР.
 |
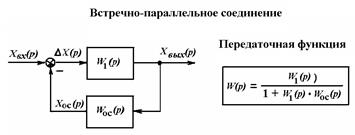 |
Рис. 3.19. Способы соединения звеньев САР
Структурная схема САР
Структурной называется схема САР, составленная из типовых
динамических звеньев. Эта схема показывает, из каких звеньев состоит САР и каким образом они соединены между собой.
На структурных схемах звенья условно изображаются прямоугольниками, внутри которых записываются их п6редаточные функции.
На рис. 3.20 представлена структурная схема САР температуры воздуха в помещении, рассмотренная в подразделе 3.1.
 |
Рис. 3.20. Структурная схема САР температуры воздуха
в помещении
Основным достоинством структурной схемы САР является то, что она позволяет весьма просто и по единообразным правилам определять передаточные функции САР и их дифференциалные уравнения. Для этого применяются простейшие зависимости, по которым определяются простейшие функции соединений звеньев, сосстоящих из последовательных, параллельных и встречно-параллельных соединений звеньев.
Например, вначале можно определить передаточную функцию разомкнутой САР, а затем – замкнутой.
Передаточная функция разомкнутой САР (для САР без главной обратной связи (см. рис. 3.21))
 . (3.39)
. (3.39)
Передаточная функция замкнутой САР

, (3.40)
или в общем виде после преобразования
 . (3.41)
. (3.41)
Из (3.41) можно увидеть, что замкнутая САР температуры воз-
духа в помещении описывается дифференциальным уравнением
третьего порядка (см. знаменатель в (3.41)).
Передаточная функция замкнутой САР необходима для оцен-
ки устойчивости и качества регулирования линейных систем.
Устойчивость линейных САР
Устойчивостью называется свойство системы регулирования возвращаться в исходный или близкий к нему режим после выхода из него в результате какого-либо воздействия.
Устойчивость – это важнейшее условие работоспособности САР.
Примеры устойчивой и неустойчивой САР с колебательным переходным процессом приведены на рис. 3.21.
Из рис. 3.21 видно, что по кривым переходных процессов, полученным экспериментально, можно ответить на вопрос устойчивости САР. Однако не во всех случаях возможно такое экспериментальное определении устойчивости. При проектировании САР это вообще невозможно. Поэтому на практике пользуются аналитическими методами устойчивости САР.
При аналитическом исследовании устойчивости за основу принимают дифференциальное уравнение, описывающее динамические свойства САР.
 |
Рис. 3.21. Переходные характеристики устойчивой и
неустойчивой САР
В общем виде такое уравнение
 (3.42)
(3.42)
Данное уравнение чаще всего определяют из передаточной функции замкнутой САР, так как  . (3.43)
. (3.43)
Способы получения передаточной функции изложены в подраз-
деле (3.3).
Если правую часть дифференциального уравнения приравнять нулю (т.е. исключить возмущающее воздействие), то можно получить однородное дифференциальное уравнение, описывающее свободное движение САР:
( ) Xсв (p)= 0, (3.44)
) Xсв (p)= 0, (3.44)
где  (p) – операторное изображение выходной величины для составляющей свободного движения системы.
(p) – операторное изображение выходной величины для составляющей свободного движения системы.
Выражение, стоящее в скобках и приравненное нулю, называется характеристическим уравнением системы
()= 0. (3.45)
Из (3.45) видно, что левая часть характеристического уравнения представляет собой знаменатель передаточной функции замкнутой САР (3.41).
Характеристическое уравнение САР является исходным при исследовании устойчивости системы регулирования.
Исследование устойчивости на практике проводят с помощью критериев устойчивости, которые позволяют по коэффициентам характеристического уравнения решить вопрос устойчивости. При этом решения дифференциального уравнения не требуется.
Критерии устойчивости могут быть разделены на алгебраические и частотные [20]. С математической точки зрения все критерии устойчивости эквивалентны, однако, целесообразный выбор того или иного критерия устойчивости при решении конкретных задач позволяет провести исследование устойчивости наиболее простым путем.
Алгебраические критерии устойчивости – позволяют судить об устойчивости системы по коэффициентам характеристического уравнения (3.44).
Критерии устойчивости Рауса и Гурвица позволяют по коэффициентам характеристического уравнения без вычисления его корней сделать вывод об устойчивости системы. Английский математик Э. Раус в 1877 г. сформулировал условие устойчивости в виде таблиц, а немецкий математик А. Гурвиц в 1895 г. разработал алгебраический критерий устойчивости в форме определителей, составленных из коэффициентов характеристического уравнения системы.
Следует заметить, что критерий Гурвица можно получить из критерия Рауса, поэтому иногда критерий Гурвица называют критерием Рауса – Гурвица.
Критерий устойчивости Рауса – Гурвица. Из коэффициентов характеристического уравнения (3.45) строят сначала главный определитель Гурвица (3.46) по следующему правилу: по главной диагонали определителя слева направо выписывают все коэффициенты характеристического уравнения от  до
до  в порядке возрастания индексов. Столбцы вверх от главной диагонали дополняют коэффициентами характеристического уравнения с последовательно возрастающими индексами, а столбцы вниз – коэффициентами с последовательно убывающими индексами. На место коэффициентов с индексами больше n (n – порядок характеристического уравнения) и меньше нуля проставляют нули.
в порядке возрастания индексов. Столбцы вверх от главной диагонали дополняют коэффициентами характеристического уравнения с последовательно возрастающими индексами, а столбцы вниз – коэффициентами с последовательно убывающими индексами. На место коэффициентов с индексами больше n (n – порядок характеристического уравнения) и меньше нуля проставляют нули.

(3.46)
Отчеркивая в главном определителе Гурвица, как показано пунктиром, диагональные миноры, получаем определители Гурвица низшего порядка:

(3.47)
Номер определителя Гурвица определяется номером коэффициента по диагонали, для которого составляют данный определитель.
Критерий устойчивости Гурвица формулируется следующим образом: для того чтобы система автоматического управления была устойчива, необходимо и достаточно, чтобы все определители Гурвица имели знаки, одинаковые со знаком первого коэффициента характеристического уравнения  , т.е. при
, т.е. при  были положительными.
были положительными.
Критерий устойчивости Гурвица обычно применяют при n ≤ 4. При n ≥ 5 целесообразно при использовании критерия устойчивости Гурвица переходить к численным методам с использованием ЭВМ.
Частотные критерии устойчивости позволяют судить об устойчивости систем автоматического управления по виду их частотных характеристик.Эти критерии являются графоаналитическими и получили широкое распространение, так как позволяют сравнительно легко исследовать устойчивость систем высокого порядка, а также имеют простую геометрическую интерпретацию и наглядность.
Критерий устойчивости Михайлова. Этот частотный критерий устойчивости, сформулированный в 1938 г. советским ученым А.В. Михайловым позволяет судить об устойчивости системы на основании рассмотрения некоторой кривой, называемой кривой Михайлова.
Пусть дано характеристическое уравнение системы четвертого порядка
 . (3.56)
. (3.56)
Представим данное уравнение в комплексной форме. Для этого оператор  заменим на
заменим на  , так как, исходя из преобразования Лапласа, (часто обозначают
, так как, исходя из преобразования Лапласа, (часто обозначают  ) является комплексным числом.
) является комплексным числом.
Тогда, заменив левую часть уравнения (3.55) на комплексный полином  , на , получим
, на , получим
 (3.57)
(3.57)
 |
где
– годограф вектора (т.е. кривая, описанная концом вращающегося вектора на комплексной плоскости);  – символ, показывающий, что рядом с ним стоящее действительное число откладывается на оси мнимых чисел.
– символ, показывающий, что рядом с ним стоящее действительное число откладывается на оси мнимых чисел.
Символ имеет значения:



 (3.58)
(3.58)
Тогда
 (3.59)
(3.59)
Выделим вещественную и мнимую части уравнения (3.58):
 (3.60)
(3.60)
где  и
и  называют соответственно вещественной и мнимой функциями Михайлова; функции
называют соответственно вещественной и мнимой функциями Михайлова; функции  и
и  представляют собой модуль и фазу (аргумент) вектора
представляют собой модуль и фазу (аргумент) вектора 
При изменении частоты  от 0 до
от 0 до  вектор , изменяясь по величине и направлению, будет описывать своим концом в комплексной плоскости
вектор , изменяясь по величине и направлению, будет описывать своим концом в комплексной плоскости  некоторую кривую, называемую кривой (годографом) Михайлова (рис. 3.22).
некоторую кривую, называемую кривой (годографом) Михайлова (рис. 3.22).
Для устойчивости САР требуется, чтобы кривая Михайлова проходила последовательно столько квадрантов, какова степень характеристического уравнения. При этом кривая Михайлова должна огибать начало координат против часовой стрелки (см. рис. 3.22).
Для устойчивости САР требуется, чтобы кривая Михайлова проходила последовательно столько квадрантов, какова степень характеристического уравнения. При этом кривая Михайлова должна огибать начало координат против часовой стрелки (см. рис. 3.22).
Также к частотным относится: критерий устойчивости Найквиста, разработанный в 1932 г. американским ученым Г. Найквистом, позволяющий судить об устойчивости замкнутой системы по виду амплитудно-фазовой характеристики разомкнутой системы; метод основанный на анализе логарифмических частотных характеристик и др. [20].
Рис. 3.22. Кривые Михайлова для устойчивых систем (а и б) и для неустойчивой системы (в)

