




Ширина рабочего спектра частот военной гидроакустической аппаратуры составляет пять-шесть октав. Инфранизкие частоты, лежащие у нижней границы этого спектра, используются датчиками давления гидродинамических мин, реагирующих на уменьшение давления воды при прохождении вблизи от них корабля. Это понижение давления представляет собой гидродинамический эффект (эффект Бернулли), а не результат воздействия звуковых волн, поскольку для его существования упругие свойства среды не играют роли и оно не распространяется от места возникновения. Однако в мине этот процесс воспринимается датчиком так, как если бы он представлял собой звуковую волну. Промежутки времени, в течение которых проявляются указанные изменения давления, соответствуют, как правило, частотам ниже 1 Гц.
В противоположность гидродинамическим акустические мины чувствительны к собственно звуковому излучению корабля. Поэтому мины этого типа взрываются, когда звуковое давление в полосе пропускания их датчиков достигает определённого уровня. При тралении акустические мины подрывают, воздействуя на них звуковым полем мощного источника, буксируемого тральщиком. В акустических минах и средствах их уничтожения обычно используется полоса частот, соответствующая максимуму излучения кораблей-целей.
Собственное излучение надводных и подводных кораблей является также фактором, используемым для их обнаружения методами шумопеленгования. Прослушивание шумов кораблей осуществляется с помощью гидрофонных антенн, устанавливаемых на других кораблях или на дне моря на большом расстоянии от шумящего объекта.
Спектр частот, прослушиваемых при пассивном обнаружении, несколько выше, чем в акустических минах, поскольку для пеленгования шумящих целей приёмная антенна должна обладать достаточно высокой направленностью.
Примером большой современной активной гидроакустической станции является гидролокатор AN/SQS-26, устанавливаемый на надводных кораблях (рис. 1.1). В этой станции излучение производится в горизонтальной и вертикальной плоскостях мощными импульсами большой длительности. Принятые эхосигналы обрабатываются для представления на индикаторных устройствах с использованием современных методов. Если судить по входящим в гидролокатор устройствам, AN/SQS-26 представляет собой весьма сложную гидроакустическую систему, обладающую значительной гибкостью в выборе режима работы.

Другим типом гидроакустических станций для надводных кораблей является буксируемый гидролокатор AN/SQS-35 (рис. 1.2) Акустическая антенна этого гидролокатора размещена в теле обтекаемой формы, буксируемом за кораблём на глубине нескольких десятков или сотен метров. Благодаря этому удаётся опустить антенну ниже слоёв с большими температурными градиентами и одновременно обеспечить поиск целей в кормовом секторе, где гидролокаторы с подкильной антенной работать не могут.

Рис. 1.2. Буксируемое тело гидролокатора AN/SQS-35 с подъёмно-опускным устройством, установленным в кормовой части эскадренного миноносца
Умеренно высокие частоты используются в самонаводящихся торпедах. Применение повышенных частот позволяет получить достаточно узкую характеристику направленности при небольших размерах антенны и снизить влияние шумов. В зависимости от используемого метода обнаружения и пеленгования целей самонаводящиеся торпеды подразделяются на активные и пассивные. В обоих случаях, обнаружив цель, торпеда автоматически наводится на неё и далее движется в её направлении.
В гидроакустических станциях миноискания и гидролокаторах для поиска малых объектов применяются высокие частоты, позволяющие реализовать острую направленность акустических антенн. Узкие характеристики направленности в сочетании с короткими излучаемыми импульсами обеспечивают обнаружение мин и других небольших объектов на фоне реверберационных помех.
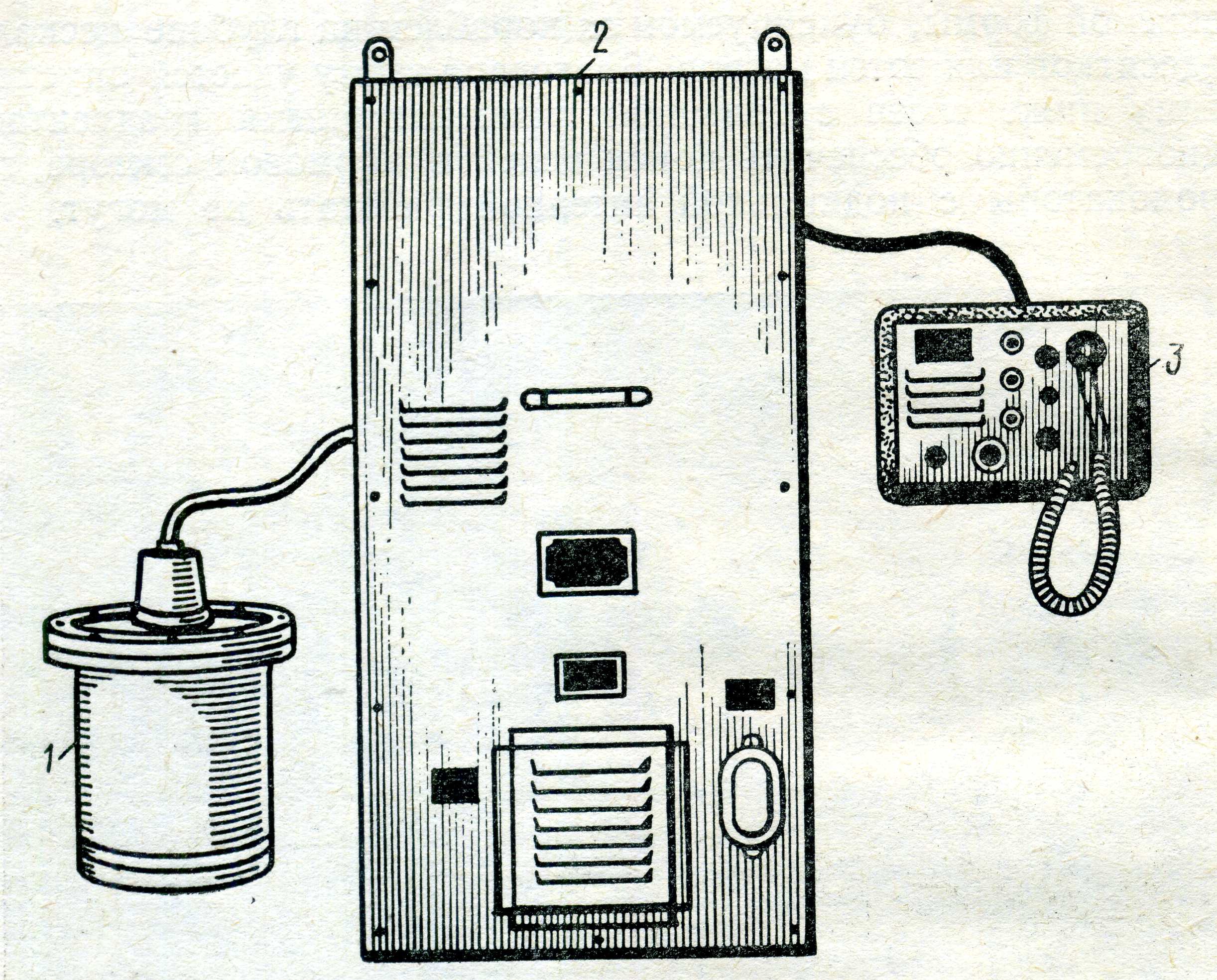
Рис. 1.3. Гидроакустический телефон UQC-1 для связи с подводными лодками [10]
1 – акустическая антенна АТ-186/UQC-1; 2 – приёмопередатчик RT-158C/UQC-1; 3 – пульт управления С-535А/UQC-1
Можно назвать несколько гидроакустических устройств специального назначения. Одним из них является подводный телефон, предназначенный для связи надводных кораблей с подводными лодками или подводных лодок друг с другом. На рис. 1.3 изображено устройство подобного типа UQC-1, работающее на несущей частоте 8 кГц с однополосной модуляцией речевым сигналом и представляющее собой гидроакустический аналог приёмо-передатчика радиоволн.
Вторым примером специального применения подводной акустики являются радиогидроакустические буи — небольшие гидролокационные устройства, сбрасываемые с самолёта для эхолокации подводных целей или прослушивания создаваемых ими шумов. Трансляция принятых сигналов на самолёт осуществляется в этих малогабаритных локаторах с помощью миниатюрных радиопередатчиков. На рис. 1.4 изображены буй, подводная лодка — цель и самолёт.

Рис. 1.4. Поиск подводной лодки с самолётом
1 – заряд взрывчатого вещества; 2 – радиоакустический буй; 3 – самолёт;
4 – подводная лодка
Активная локация подводных целей может осуществляться также с помощью специальных взрывных зарядов, сбрасываемых с самолёта. В этом случае радиогидроакустический буй используется для приёма эхосигналов и передачи их на самолёт. Общий вид буя и его основные компоненты показаны на рис. 1.5.

Рис. 1.5. Основные элементы радиогидроакустического буя
1 — антенна; 2 — плавающий корпус с электронной аппаратурой; 3 — гибкая подвеска;
4 — демпфирующий цилиндр;
5 — предусилитель; 6 ‒ гидрофон; 7 — груз

