




Основным средством приведения в движение рабочих машин является электрический двигатель, а, следовательно, основным типом привода служит электрический привод или электропривод (ЭП). Наиболее широко используют системы автоматизированного электропривода (АЭП). Современные АЭП выполняют в виде замкнутых систем автоматического управления.
Основными управляемыми параметрами (координатами) электропривода принято считать частоту вращения, ток, момент, точность позиционирования (положение).
В качестве примера, рассмотрим электропривод с двигателем постоянного тока независимого возбуждения (ДПТНВ). Электрическая схема системы управляемого ЭП постоянного тока с двигателем независимого возбуждения, включенного по системе «генератор двигатель» дана на рис. 4.
Для регулирования параметров ЭП используют типовые законы регулирования: П–закон (пропорциональный), И–закон (интегральный), ПИ–закон (пропорционально интегральный), ПИД–закон (пропорциональный интегрально дифференциальный), А–закон (апериодический). В данном случае выбираем П-закон регулирования.
По принципиальной схеме системы автоматизированного ЭП с ДПТНВ необходимо составить структурную схему (рис.5).
| BR |
| G |
| M |
| УМ |
| R 2 |
| R 1 |
 U П U П
|
| RP |
| U y |
| U зд |
| U я |
| U ос |
| + |
| - |
| OBG |
| OBM |
| U в |
| DA |
Рис. 4. принципиальная схема ЭП ДПТНВ с регулятором по скорости
RP - устройство сравнения, Р - регулятор, УМ - усилитель мощности, ОBG -обмотка возбуждения генератора, G - генератор, М - двигатель, ОВ М – обмотка возбуждения двигателя, BR – тахогенератор
В структурной схеме каждый элемент электропривода представлен передаточной функцией (ПФ) Wi (s), где s – аргумент преобразования Лапласа.
| Тахогенератор |
| W р(s) |
| W ум(s) |
| W г(s) |
| W д(s) |
| WBR (s) |
| Регулятор |
| Усилитель мощности |
| Генератор |
| Двигатель |
Рис. 5. Структурная схема электропривода с ДПТНВ
Для анализа системы управления ЭП используют аппарат теории управления. Систему автоматического управления ЭП исследуют на устойчивость и определяют показатели качества. Устойчивость и качественные показатели ЭП определяют по переходному процессу. Построение переходного процесса является достаточно трудоемкой процедурой. Однако, существуют косвенные методы или критерии для определения устойчивости и качественных показателей.
Передаточные функции типовых элементов ЭП с ДПТНВ приведены в таблице 3.
Таблица 3 - Выражения передаточных функций Wi (s)
| W ум(s) | W г(s) | W д(s) | WBR (s) | W пи(s) | W п(s) |
| K yм | 
| 
| 
| 
| K п |
Проверим систему ЭП на устойчивость с помощью программы VisSim. Для этого построим переходный процесс рисунок 9. С помощью программы VisSim. Для устойчивой системы переходной процесс должен быть затухающим. Построив переходный процесс определили что он затухающий, следовательно, наша система устойчива.
Определим один из качественных показателей переходного процесса – время.
tпер.процесса = 15секунд
Значение коэффициентов и постоянных величин
| Кум | Кг | Тг | Тд | Кд | КBR | Кп |
| 1,6 | 2,4 | 0,14 | 0,8 | 1,5 |
Изобразим принципиальную схему электропривода с П регулятором (приложение 3).
Исследуем систему на устойчивость. Определим эквивалентную передаточную функцию




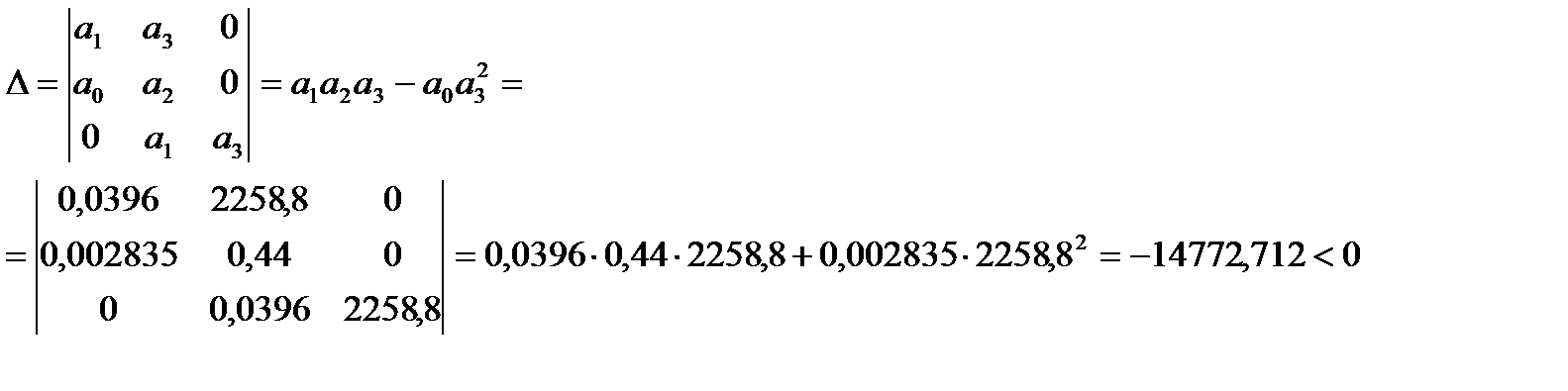
Применим критерий Гурвица
Построим логарифмические частотные характеристики (рис.2). Для построения амплитудо-частотной используем соотношение

Фазо-частотную характеристику строим по формуле

Таблица 3
| lgA | 66,9 | 58,7 | 43,8 | 29,0 | 13,6 | -3,131 |
| lgω | -1,176 | 0,45 | 1,045 | 1,398 | 1,699 | 2,0 |
| φ(ω) | -45,377 | -157,94 | -251,496 | - | - | - |
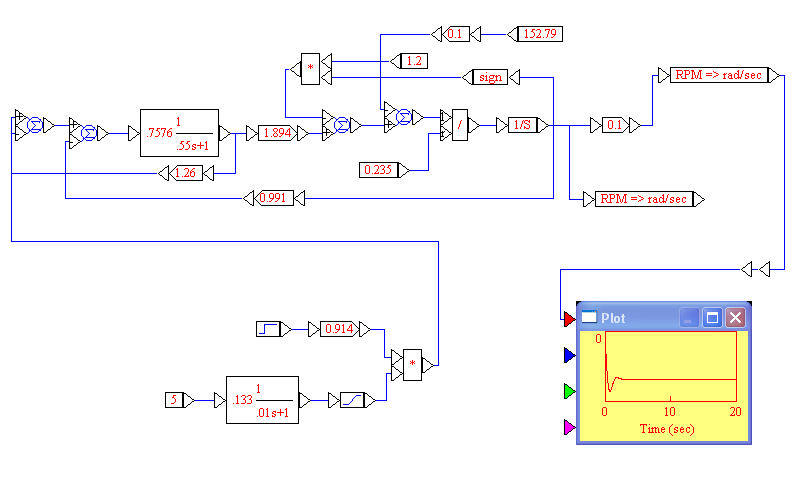 Рисунок Структурная схема моделирования электропривода в среде VisSim
Рисунок Структурная схема моделирования электропривода в среде VisSim
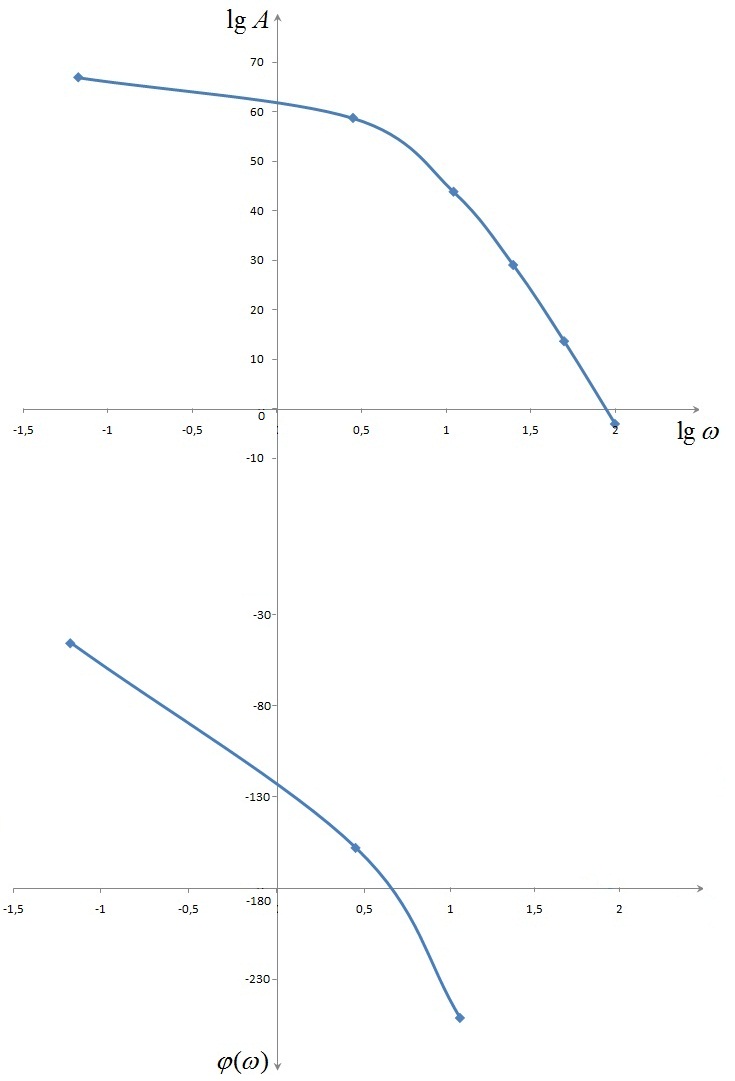
Рис.2. Характеристики ЛАЧХ и ЛФЧХ.
Заключение
В данной курсовой работе изучили машины постоянного тока. На примере двигателя постоянного тока независимого возбуждения разработали систему электропривода с управлением по скорости. Проверили ее на устойчивость, для чего построили переходный процесс. Определили один из качественных показателей переходного процесса – время.
Список используемой литературы
1. Буштрук Т. Н. Методические указания к выполнению курсовой работы по дисциплине «Электрические машины и электропривод» для студентов специальностей «Локомотивы», «Вагоны», «Электрический транспорт железных дорог» всех форм обучения [Текст] / Т. Н. Буштрук, Л. И. Брятова. – Самара: СамГАПС, 2005. – с.: ил. Библиогр.: с.– 300 экз.
2. Учебник для вузов ж.-д. Трансп. А.Е. Зорохович А.А. Реморов, под ред. А.Е. Зороховича.-М.:Транспорт,1982.367 с.
3. Электрические машины: учебник для электротехн. средн. спец. учебных заведений / М.М. Кацман. – 4-е изд.,перераб. и доп. – М.:Высш.шк., 2002. – 469с.
4. Тяговые электрические машины и преобразователи. Л. «Энергия», 1977.
5. Винокуров В.А., Попов Д.А. Электрические машины железнодорожного транспорта. Учебник для вузов. – М.: Транспорт, 1986. – 511с.

