




Реакция со стороны направляющих на ползун 
R43= = н.
Так как внешние силы и инерционные нагрузки, приложенные к шатуну и кривошипу, не учитываются  .
.
В проекциях на оси X,Y системы координат

 .
.


 = н.
= н.  = = н.
= = н. 

Уравновешивающий момент на валу кривошипа

 .
.
М1= = Нм.
Знак “+” в результатах означает, что  — движущий момент, знак “–” - момент сопротивления.
— движущий момент, знак “–” - момент сопротивления.
Результаты расчётов представлены в табл.2 и на рис.5,6,7.
В положении механизма  строим проверочный план сил для ползуна (рис. 8). Должно выполняться условие равновесия сил:
строим проверочный план сил для ползуна (рис. 8). Должно выполняться условие равновесия сил:
. 
Табл.2
| φ град. | Рсопр. Н | QДИН. Н | R43 Н | R41x Н | R41y Н | М1 Нм |
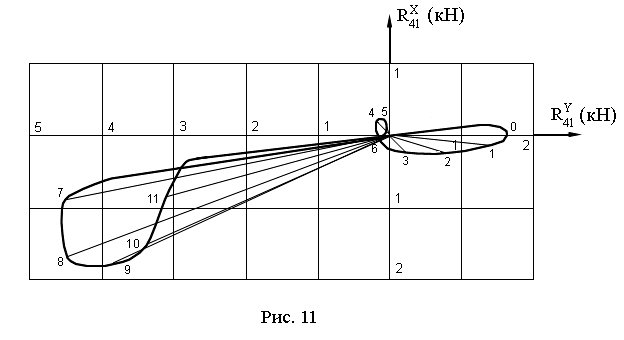
Рис.5
Рис.6
Рис.7
Рис.8
3 .Выравнивание хода машины. Расчёт маховика.
В качестве динамической модели машины принято вращающееся звено 1 (кривошип), являющееся ведущим звеном исполнительного механизма. Положение его определяется углом поворота φ, а движение – угловой скоростью ω 1. При этом все силы, действующие на звенья машины, заменяются приведенным моментом Мпр, а массы и моменты инерции всех звеньев заменяются приведенным моментом инерции Jпр.
Величина приведенного момента Мпр находится из условия равенства мощностей приводимых сил и мощности на звене приведения.
Приведенный момент инерции Jпр определяется из условия равенства кинетических энергий приводимых звеньев и звена приведения.
3.1 Расчёт работы сил сопротивления, движущей и избыточной работ.
Приведённый момент Мс от силы сопротивления Р на ползуне (с учётом его силы тяжести G3) находится по зависимости
Мс = (Р + G3 cos β) ∙ S′.
Зависимость силы Р от угла поворота кривошипа задана графиком, приводимым в задании. Знак силы Р определяется её направлением относительно оси X. Само направление силы сопротивления противоположно скорости ползуна. Значения Р, S′ подставляются с учётом знаков.
Расположение механизма определяется углом β между положительным направлением оси X и вектором силы тяжести (угол отсчитывается от оси X против часовой стрелки).
Для вертикальной схемы (ось Х- вверх) -  =180○,
=180○,
В нашем задании = ⁰.
Пример расчёта: Мс= = Нм.
Величины Мс для каждого положения приведены в табл.3 и показаны на графике (рис.10).
Зная в каждом положении величину момента Мс, можно на каждом участке определить работу сил сопротивления и сил тяжести.
АС =  Мсdφ.
Мсdφ.
Используем метод численного интегрирования.
Суть метода состоит в то, что работу на графике моментов, представляющую собой площадь криволинейной трапеции, образованной кривой графика (рис.9) и осью φ, приближённо, можно заменить площадью обычной трапеции:
АC ≈ 0,5∙ (Ма + Мв) ∙ Δφ.
Здесь  - (в радианах).
- (в радианах).

Рис.9
Точность интегрирования зависит от числа выбранного числа участков. Погрешность вычислений представляет собой (рис.9) площадь (заштрихована) между кривой графика момента и хордой, соединяющей начальную и конечную точки участка.
В данной работе расчёт ведётся для 12 участков.
При этом Δφ = (2π / 12) = 0,5236.
На участке от начального положения до первого
А 0 - 1 = 0,5(М 0 + М 1) ∙Δφ.
А 0 - 1 = = Нм.
На участке от начального положения до второго
А 0 - 2 = А 0 - 1 + А1-2 = А 0 - 1 + 0,5(М 1 + М 2) ∙Δφ.
А 0 - 2 = = Нм.
И так далее…
Работа сил сопротивления за период будет равна
 = А 0 - 11+0,5(М11+М12) ∙ Δφ.
= А 0 - 11+0,5(М11+М12) ∙ Δφ.
= = Нм.
При установившемся движении за период работа движущих сил
 = - .
= - .
Принимаем, приближённо, что МД=const. Тогда его величина определяется по формуле
Мд = () / 2π = = Нм.
Линия, соответствующая МД, показана на рис.10.
Величина движущей работы в каждом положении агрегата равна:
А д =МД*φ (φ- в радианах). А д = = Нм.
В каждом положении находится избыточная работа АИ и равное ей приращение кинетической энергии  Т агрегата.
Т агрегата.
Т = Аи = Мд · φ + Ас.
Здесь 0 ≤ φ ≤ 2π, Δφ = (2π /12) = 0,5236.
Т = Аи = = Нм.
Результаты расчётов представляются на рис.11 и приводятся в табл.3.
Рис.10
Рис.11
Ориентировочная мощность двигателя (в ваттах) определяется по формуле: N = Mд ∙ ω1 ∕ η
Здесь ω1 = π ∙ n1 / 30.
 общий коэффициент полезного действия, учитывающий потери на трение в кинематических парах, в ременной и зубчатой передачах.
общий коэффициент полезного действия, учитывающий потери на трение в кинематических парах, в ременной и зубчатой передачах.
Принимаем приближённо η = 0,85.
N= = Вт.
По найденной мощности выбираем (м.у. /3/) тип электродвигателя.
Номинальная мощность Nn= кВт.
Номинальная частота вращения nn= об/мин.
Момент инерции ротора Jр= кг.м2.
Определяем передаточное отношение от двигателя до кривошипа
iдк = nn / n1 = =.
3.2 Расчёт изменения кинетической энергии агрегата.
Изменение кинетической энергии агрегата, равное избыточной работе, определяется по зависимости:
Т = ТС + ТV.
Тc - изменение кинетической энергии вращающихся масс;
ТV- изменение кинетической энергии масс, совершающих сложно-плоское и возвратно-поступательное движения.
При малых колебаниях угловой скорости можно приближённо принять
Тv ≈ 0,5 •  (Jv - Jvн).
(Jv - Jvн).
Величину Jv приведённого момента инерции масс, совершающих поступательное движение, в каждом положении вычисляется по формуле Jv = m3 ∙ (S¢)2.
Следовательно: Тv ≈ 0,5 * * m3 ∙ (S¢)2.
Тv = = Нм.
Отсюда находится в каждом положении механизма приращение кинетической энергии вращающихся масс:
ТC = Т - ТV.
ТC= = Нм.
Величина ТC, периодически меняясь, достигает в каких-то положениях максимальных  и минимальных
и минимальных  значений. Соответственно, в этих положениях угловая скорость будет достигать также значений ωmax и ωmin. Наибольший перепад кинетических энергий вращающихся масс будет
значений. Соответственно, в этих положениях угловая скорость будет достигать также значений ωmax и ωmin. Наибольший перепад кинетических энергий вращающихся масс будет
 =
=  -
-  = = Нм.
= = Нм.
Результаты расчётов Т=АИЗБ., Тc, Тv представлены на рис.12 и приводятся в табл.3.
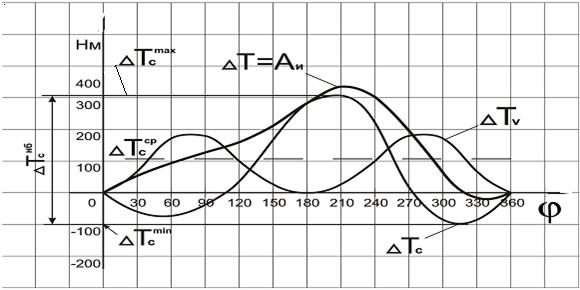
Рис.12
3.3 Определение размеров маховика.
Определяем необходимую величину Jс приведённого момента инерции вращающихся масс.
Jc = / (δ ∙  ) = = кг.м2.
) = = кг.м2.
Величина Jсо , имеющихся вращающихся масс Jсо = Jп + Jр ∙ (iдк)2.
Здесь: Jп –момент инерции передаточного механизма, приведённый к валу кривошипа (задаётся в работе);
Jр ∙ (iдк)2- момент инерции ротора двигателя, приведённый к валу кривошипа.
Jсо= = кг.м2.
Момент инерции маховика находится как разница между необходимой величиной Jс приведённого момента инерции вращающихся масс и величина Jсо , имеющихся вращающихся масс.
JМ = Jc – Jco = = кг.м2.
Конструктивно маховик выполняется в виде колеса с массивным ободом прямоугольного сечения. Расчетная схема для определения размеров обода показана на рис.13.

Рис.13
Принимаем,приближенно, что 90% момента инерции маховика относится к ободу. Задаём ориентировочно значение среднего радиуса Rср= 4*ОА. Тогда масса обода находим по формуле mоб =  = = кг.
= = кг.
Площадь сечения обода определим по формуле
b ∙ h =  = = м2.
= = м2.
где r - плотность материала (для чугуна r = 7200 кг/м3). Для определения размеров сечения b и h задаём соотношение b / h = 1.
b =h= = м.
Чтобы исключить возможность разрушения обода маховика под действием центробежных сил инерции, производим проверка окружной скорости
Vокр = wср (Rср +0,5h) ≤ VКР. Для чугуна VКР = 30м/c.
Vокр= = ≤ VКР.
По уточнённым данным вычерчиваем в масштабе эскиз маховика (рис.14), на котором проставляем наружный диаметр dН = (2RСР + h), внутренний диаметр обода dВН = (2RСР - h) и ширина обода b.
При этом численные значения этих величин округляем до ближайших стандартных из ряда нормальных линейных размеров. Все остальные элементы маховика оформляем из конструктивных соображений, их размеры не проставляем.
dН = = м.
dВН= = м.
b= м.

Рис.14
3.4 Контрольный анализ хода машины.
Анализ хода выполняется для проверки расчёта маховика и включает в себя определение мгновенных значений угловой скорости кривошипа, определение коэффициента неравномерности хода и сравнение его с заданным. Отклонение Δω угловой скорости от её среднего значения, определяем по формулам:
Δω = ( ТС -  ) / (ωср ∙ JC),
) / (ωср ∙ JC),
где - приращение кинетической энергии в положении, где ω=ωср.
=0,5( +  )= = Нм.
)= = Нм.
Δω= = с-1.
Так как при наличии маховика колебания скорости малы, на графике угловой скорости откладываем её отклонения Δω от среднего значения (рис.15).
Контрольный коэффициент неравномерности хода δК определяем по формуле δк = (Δωнб) / ωср, где Δωнб = (ωmax - ωmin) – определяются из расчётов (табл.3 и рис.15). Отклонение оценивается в процентном отношении к заданному (Δδ)% = 100(δк - δ) / δ.
Δωнб= = 1/с.
δк= =.
(Δδ)%= =.
Рис.15
Литература
1. Фролов К.В.Теория механизмов и механика машин–М.:Высш.шк.2005.
2. Кинематический и силовой расчет механизма. Метод. указания к выполнению курсовой работы
по ТММ. Изд. Кафедры ТМ и ДМ. – СПб.: ПИМаш, 2011.
3. Выравнивание хода машины. Расчёт маховика. Метод. указания к выполнению курсовой работы по ТММ. Изд. Кафедры ТМ и ДМ. – СПб.: ПИМаш, 2009.
| φ град. | ||||||||||||||
| РС Н | ||||||||||||||
| МС Нм | ||||||||||||||
| АС Нм | ||||||||||||||
| АД Нм | ||||||||||||||
| АИ Нм | ||||||||||||||
| ΔТV Нм | ||||||||||||||
| ΔTC Нм | ||||||||||||||
| Δω 1/с | ||||||||||||||
| Ω 1/с |
Табл.3

