Пуск (пониженном напряжении)
Этот способ применяют при пуске в ход мощных двигателей, для которых недопустимо прямое включение в сеть. Для понижения подводимого к обмотке статора напряжения используют дроссели и понижающие автотрансформаторы. После пуска в ход на обмотку статора подается напряжение сети.
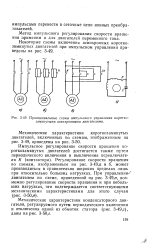
Понижение напряжения производят с целью уменьшения пускового тока, но одновременно, происходит уменьшение пускового момента. Если напряжение при пуске понизить в раз, пусковой момент понизится в 3 раза. Поэтому этот способ пуска можно применять только при отсутствии нагрузки на валу, т.е. в режиме холостого хода.
Основные недостатки этого способа пуска: высокая стоимость пусковой аппаратуры и невозможность пуска с нагрузкой на валу.
Tорможение (в генераторном режиме)
Машина переходит в режим генератора, если n>n0, т.е. если ротор вращается быстрее магнитного поля. Этот режим может наступить при регулировании скорости вращения увеличением числа пар полюсов или уменьшением частоты источника питания, а также в подъемно-транспортных машинах при опускании груза, когда под действием силы тяжести груза ротор начинает вращаться быстрее магнитного поля.
В режиме генератора изменяется направление электромагнитного момента, т.е. он становится тормозным, под действием чего происходит быстрое снижение скорости вращения. Одновременно изменяется фаза тока в обмотке статора, что приводит к изменению направления передачи электрической энергии. В режиме генератора происходит возврат энергии в сеть
8. синтез систем автоматического управления на контактных элементах
Автоматическая система управления – это соединение отдельных элементов в определенную конфигурацию, обеспечивающую заданные характеристики. Связь между входом и выходом – это, по сути, преобразование одного сигнала в другой, причем довольно часто с усилением мощности. В разомкнутой системе управления для получения желаемой реакции объекта обычно используется регулятор или исполнительное устройство.
Измеренное значение выхода называют сигналом обратной связи. Простейшая замкнутая система управления – система регулирования, поддерживающая желаемое значение выходного сигнала. Замкнутая система стремится поддержать заданное соотношение между двумя переменными путем сравнения функций от этих переменных и использования их разности в качестве управляющего сигнала. Чаще всего разность между заданным значением выходной переменной и ее действительным значением усиливается и используется для воздействия на объект управления, в результате чего эта разность постоянно уменьшается. Принцип обратной связи лежит в основе анализа и синтеза систем управления.
В замкнутой системе производится измерение выходной переменной и его результат в виде сигнала обратной связи сравнивается с эталонным входным сигналом, несущим информацию о заданном значении выходной переменной
9. Рассказать о синтезе систем автоматического управления на бесконтактных элементах.
В настоящее время системы управления на электромеханических реле применяются редко. Вместе с тем языки релейно-контактных схем широко распространены при программировании логических контроллеров. Это объясняется тем, что релейные структуры имеют определенные преимущества перед схемами на бесконтактных логических элементах. В частности, в релейных схемах легче анализировать последовательность протекания автоматического цикла.
Таким образом, релейно-контактный вариант системы управления можно рассматривать как промежуточную модель, которую затем легко перевести на бесконтактные логические элементы
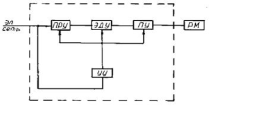
32. Любое машинное устройство состоит из машины-двигателя, передаточного механизма и рабочего механизма.Двигатель и передаточный механизм называют приводом, так как они служат для передачи мощности и движения рабочему механизму (машине) с нужной угловой частотой вращения.В настоящее время в качестве двигателей используются простые в управлении, экономичные, надежные в эксплуатации электрические двигатели, поэтому привод современных производственных механизмов получил название электропривода.
Функциональная схема электропривода: ПРУ - преобразующее устройство; ЭДУ - электродвигательное устройство; ПУ - передающее устройство; УУ -у правляющее устройствоВ современном автоматизированном электроприводе существенную роль играют преобразовательные (ПРУ) установки (выпрямительные устройства, регуляторы напряжения, частоты и др.) и аппаратура управления (УУ), совместная работа которых обеспечивает надлежащий ход технологического процесса.
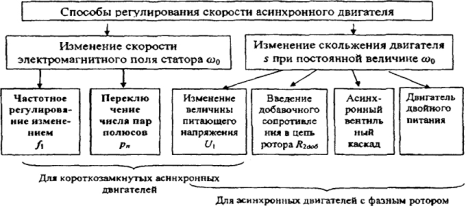
34. Этот способ регулирования часто называют реостатным. Он заключается во введении добавочных (активных) сопротивлений в статорную или роторную цепь Д. Способ очень прост, но сопровождается значительными потерями и не позволяет получить высокое качество регулирования. Здесь может быть несколько вариантов.Первый вариант: включение добавочного резистора в цепь статора. Второй вариант: включение добавочного резистора в цепь ротора
35. Регулирование можно производить следующими способами: Частотное регулирование. Регулирование путем изменения числа полюсов. Регулирование путем включения реостата в цепь ротора. Изменение направления вращения. Для изменения направления вращения ротора электродвигателя надо изменить направление вращения магнитного поля. для этого необходимо изменить порядок чередования тока в фазах обмоток статора. В трехфазных машинах это осуществляется путем переключения двух любых проводов, подводящих ток из трехфазной сети к фазам этой обмотки.
36. Импульсное регулирование скорости производится путем периодического включения двигателя в сеть и отключения его от сети либо путем периодического шунтирования с помощью контактора или полупроводниковых вентилей сопротивлений, включенных последовательно в цепь статора. При этом двигатель беспрерывно находится в переходном режиме ускорения или замедления скорости вращения ротора и в зависимости от частоты и продолжительности импульсов работает с некоторой, приблизительно постоянной скоростью вращения. Следует отметить, что надежная и четкая работа систем импульсного регулирования скорости вращения двигателей зависит от надежности и быстродействия аппаратов управления.
38. Применение частотно-регулируемого электропривода обеспечивает: · изменение скорости вращения автоматизированного электропривода в ранее нерегулируемых технологических процессах; · синхронное управление несколькими электродвигателями от одного преобразователя частоты; · замена приводов постоянного тока на частотный асинхронный электропривод, что позволяет снизить расходы, связанные с эксплуатацией; · создание замкнутых систем асинхронного электропривода с возможностью точного поддержания заданных технологических параметров; · возможность исключения механических систем регулирования скорости вращения (вариаторов, ременных передач); · повышение надежности и долговечности работы оборудования; · большую точность регулирования скорости движения, оптимальные параметры качества регулирования скорости в составе механизмов, работающих с постоянным моментом нагрузки (конвейеры, загрузочные кулисные механизмы и т. п.).
.37.