




ВВЕДЕНИЕ
Развитие микроэлектроники и широкое применение ее изделий в промышленном производстве, в устройствах и системах управления самыми разнообразными объектами и процессами является в настоящее время одним из основных направлений научно-технического прогресса.
Использование микроконтроллеров в изделиях не только приводит к повышению технико-экономических показателей (стоимости, надежности, потребляемой мощности, габаритных размеров), но и позволяет сократить время разработки изделий и делает их модифицируемыми, адаптивными. Использование микроконтроллеров в системах управления обеспечивает достижение высоких показателей эффективности при низкой стоимости.
Микроконтроллеры представляют собой эффективное средство автоматизации разнообразных объектов и процессов. Все это определяет необходимость изучения микропроцессорных систем.
Знания, полученные при разработке микропроцессорной системы в курсовой работе, необходимы не только для узкого круга специалистов, занимающихся разработкой компьютеров, но и любому инженеру, работающему с микропроцессорной системой. Они необходимы для четкого понимания принципов работы любого компьютера, что поможет при необходимости найти и исправить возможные неполадки, усовершенствовать используемую систему, разработать новую. Знание внутренней организации ЭВМ необходимо для написания программ, напрямую работающих с аппаратными средствами микропроцессорных систем. Схема, разрабатываемая в данной курсовой работе, выполняет функцию сбора и обработки информации и содержит все функциональные блоки любого компьютера. Основным достоинством микропроцессора, применяемого в данной курсовой работе, является его дешевизна, что позволило ему найти широкое применение.
ПОСТАНОВКА ЗАДАЧИ
Контроллер, который разрабатывается в этой курсовой работе, должен обеспечивать:
· периодический опрос Р аналоговых датчиков и преобразование их сигналов с заданной точностью в цифровой код;
· обработку цифровых кодов с целью вычисления заданной функциональной зависимости Y(t) в реальном масштабе времени;
· отображение вычисленных значений функции Y(t) на дискретных индикаторах;
· преобразование цифровой функции в аналоговый сигнал y(t).
Номер варианта 6;
Количество аналоговых датчиков, Р 15;
Максимальное напряжение на выходе датчиков, Umax 3 В;
Требуемый период коммутации датчиков, Т 160 мкс;
Требуемая точность преобразования, d 0,05;
Разрешённые номера портов ввода/вывода, <V> 32 – 47;
Функция Y(t) = [N(1)/1 + N(2)/2+…+ N(P)/P].
Контроллер исполняется микропроцессора КР1821ВМ85А с использованием различных блоков и устройств на базе 580-й серии или других – полностью совместимых с этой серией микросхемах.
Для выполнения проекту необходимо решить задачу по разработке аппаратной части контроллера.
Выбор и обоснование структурной схемы
Под разработкой структурной схемы понимается: определение функционального состава входящих в микропроцессорный контроллер блоков (модулей); расчет и обоснование технических требований к указанным блокам и установление необходимых электрических связей между ними.
Согласно заданию на проектирование, разрабатываемое устройство должно обеспечивать:
· периодический опрос датчиков аналоговой информации и преобразование ее в цифровую;
· вычисление в реальном масштабе заданной функциональной зависимости Y(t)отображение вычисленных значений функции Y(t) на дискретных индикаторах;
· преобразование цифровых кодов Y(t) в аналоговый сигнал y(t).
Для управления процессом преобразования и вычислений в состав проектируемого устройства должен в обязательном порядке входить микропроцессорный блок (МБ), который по сути дела должен предоставлять микро-ЭВМ, работающую по «жесткой» программе и обладающую возможностями подключения к ней устройств ввода и вывода данных.
Дня решения первой задачи в состав проектируемого устройства необходимо включить блок ввода аналоговых данных (БВВАД); второй задачи -блок вывода аналоговых данных (БВАД); третьей задачи - блок отображения информации (БОИ). Все указанные блоки должны сопрягаться с микропроцессорным блоком через интерфейсные блоки.
Структурная схема микропроцессорного контроллера приведена на рисунке 1.
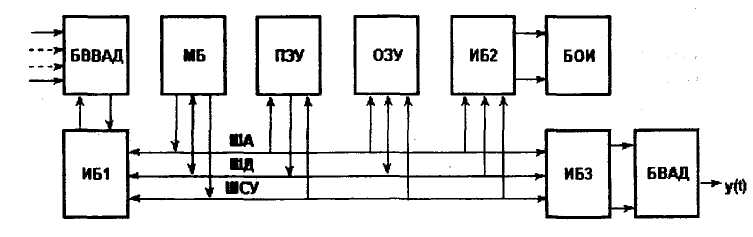
Рисунок 1 — Структурная схема контроллера: МБ - микропроцессорный блок; БВВАД- блок ввода аналоговых данных; БВАД- блок вывода аналоговых данных; БОИ-блок отображения информации; ПЗУ, ОЗУ- постоянное и оперативное запоминающее устройства; ИБ1 -ИБЗ — интерфейсные блоки
Контроллер, как и любую МПС, следует строить по модульному (блочному) принципу с шинной организацией связей между блоками, что и отображено на рисунке 1. Физически шины адреса (ША), данных (ЩД) и сигналов управления (ШСУ) представляют собой параллельные проводники, предназначенные для передачи многоразрядных цифровых кодов либо в двух, либо в одном направлении. Достоинство шинных связей - существенное уменьшение числа соединительных проводов. Однако наличие шинных связей предъявляет определенные требования к подключенным к ним блокам и узлам. В первую очередь по выходу блоки и узлы обязательно должны иметь высокоимпедансное состояние (Z - состояние). Можно нагружать на шины так же микросхемы, допускающие объединение по выходу (схемы с открытым коллектором). Кроме того, при работе на шину блоки и узлы должны обладать достаточной нагрузочной способностью.

