




Основные понятия и определения методов радиолокации.
Радиолокация: радио- излучение, локус- местонахождение.
Ra dio d etection a nd ra nging – RADAR.
РЛО (Радиолокационный объект) может быть любой объект, чьи свойства резко отличаются от свойств среды. РЛО могут быть точечными или протяженными.
РЛИ (РЛ изображение)- это то, что мы видим на индикаторе - устройстве для отображения РЛИ в виде, приятном для глаза человека.
Однозначное местоположение объекта в пространстве определяется 3-мя координатами. Для оценки характера движения объекта необходимо определить производные его координат, число которых определяется сложностью движения объекта. Скорость объекта определяется через использование Доплеровского эффекта. Интегрирование скорости позволяет получить значение дальности до объекта, а дифференцирование - определить его ускорение. Из множества измерительных систем выделяют РЛ и радионавигационные измерительные системы.
Радиолокация - определение координат кого-то. Радионавигация - определение собственных координат.
Процесс обнаружения объектов, оценки значения их координат и параметров движения называется РЛ наблюдением. Устройство для обнаружения – РЛ станция.
Радиоуправление – отрасль техники, охватывающая методы и средства управления движением беспилотных объектов. Учитывая природу возникновения сигнала, несущего информацию об объекте различают:
1) Активную
2) Полуактивную
3) Активная с активным ответом
4) Пассивная
Активная РЛС.

Рис.1
Полуактивная РЛС.

Рис.2
«+» один командный пункт могут обслуживать множество приёмников.
«-» демаскирование самого себя своим излучением. При уничтожении передатчика КП, все обслуживаемые им головки выходят из строя.
Активная РЛС с активным ответом.
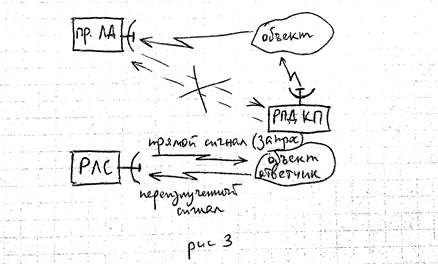
Рис.3
Пассивная РЛС.

Рис.4
«+» мы себя ничем не демаскируем
«-» мы не можем определить дальность
Физические основы радиолокации.
1) Прямолинейность распространения радиосигнала.
2) Постоянство скорости распространения 300тыс. км. в секунду.
3) Отражение сигнала от неоднородности, встречаемой на пути.
Основные координаты, характеризующие местоположение объекта в пространстве.
1) Наклонная дальность – прямая, соединяющая объект и радиостанцию.
2) Угол места – угол между направлением на объект и направлением на линию горизонта.
3) Азимут – угол между направлением на север и направлением на объект, отсчитываемый по часовой стрелке.
Методы определения местоположения объекта.
Угломерный метод.
Метод основан на использовании направленных свойств антенны. Используется в радиопеленгации и как радиокомпас.
Данный метод основан на измерении направлений – «взятии пеленгов» - на объект из нескольких точек наблюдения. Как правило, пеленг определяется как угол между направлением на объект и линией «юг-север» или любой другой.

Рис.5
Дальномерный метод.

Рис.6
Измерение угловых координат.
Фазовый метод – основной метод пеленгации. Используется система из 2 ненаправленных антенн, разнесенные в пространстве на расстояние d.
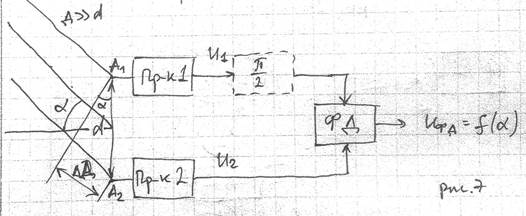
Рис.7

Метод максимума:
В точках максимума cos при значительном изменении угла наклона касательной, функция изменяется незначительно и пеленгационная чувствительность стремится к 0. В точке пеленга разностный сигнал будет равняться 0.
Механизм поворота вращает антенну; одновременно приводится в действие указатель поворота, по шкале которого отсчитывается направление оси антенны. При вращении антенны выходное напряжение приёмника U вых повторяет форму диаграммы направленности антенны (рис. 3.6).

Пеленгационная характеристика при пеленгации по максимуму.
Когда ось антенны совпадает с направлением на цель, выходное напряжение приёмника достигнет максимума; в этот момент указатель поворота антенны покажет пеленг цели φц.
Достоинствами метода являются простота его технической реализации и получение наибольшей (при прочих равных условиях) амплитуды принимаемого сигнала в момент пеленгации. Основной недостаток метода состоит в относительно низкой точности измерений угловой координаты.
Точность измерения угла характеризуется пеленгационной чувствительностью, представляющей собой крутизну пеленгационной характеристики вблизи направления на цель:

Чем больше пеленгационная чувствительность, тем выше точность измерения угловой координаты.
При пеленгации по максимуму для диаграмм направленности любого типа пеленгационная чувствительность очень мала (при точном пеленге  ), поэтому и точность измерения координат относительно низка.
), поэтому и точность измерения координат относительно низка.
Метод минимума:
В точках пеленга максимальная крутизна наклонной. Но не позволяется однозначно определить направление прихода сигнала, поэтому используется суммарно-разностный метод.
Метод пеленгации по минимуму отличается тем, что отсчёт угловой координаты производится в момент уменьшения до минимума выходного напряжения приёмника.
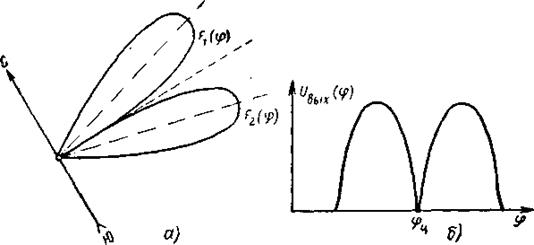
Диаграмма направленности антенного устройства (а) и пеленгационная характеристика при пеленгации по минимуму (б).
Диаграмма направленности антенны пеленгатора должна иметь в средней части провал до нуля. Этого можно добиться, например, если использовать две антенны, повёрнутые в пространстве одна относительно другой на угол, равный ширине диаграммы направленности по нулевому уровню.
При пеленгации по минимуму может быть получена высокая точность измерения угловой координаты, так как пеленгационная чувствительность велика. Но амплитуда сигнала вблизи направления пеленга мала; при точном пеленге она становится равной нулю.
Практически по методу минимума можно пеленговать только источники мощного собственного излучения. Поэтому метод пеленгации по минимуму, получивший широкое применение в радионавигации, в радиолокации не используется.
Суммарно-разностный метод (амплитудно-фазовый метод):
Используется отношение разностного сигнала к суммарному. Знак отношения будет показывать направление прихода сигнала. В точке пеленга используется максимальный сигнал. Этот метод включает достоинства 2-х предыдущих и устраняет их недостатки.
Равносигнальный метод:

Рис.8
РСН – равносигнальное направление – ось, проходящая через начала ДН и место их пересечения. Позволяет однозначно определить направление отклонения сигнала от РСН.
Ц – цель.

∆α- угол между РСН и направлением на цель.

