




схемы направляющего устройства
Основные кинематические схемы направляющего устройства подвески представлены на рис. 2. 1.
При зависимой подвеске с полуэллиптическими рессорами упругий элемент полностью или частично выполняет функции направляющего устройства (рис. 2.1-а, -б). При использовании в зависимой подвеске пружин в качестве упругих элементов, кинематика подвески обеспечивается пространственным механизмом. Такой механизм обычно состоит из четырех диагональных или трех…четырех продольных и одной поперечной штанги, называемой тягой Панара (рис. 2.1-в, -г).
Независимые подвески подразделяют на двух-, одно- и безрычажные (телескопические). Как правило, двухрычажные схемы выполняют с качанием рычагов в поперечной плоскости (рис. 2.1-д, -е), а однорычажные – с качанием рычагов в поперечной, продольной и диагональной плоскостях (рис. 2.1-ж…к). Схема безрычажной подвески с вертикальным перемещением колеса показана на рис. 2.1-л.

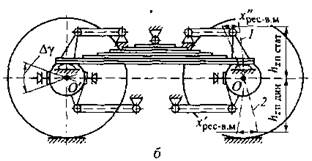


Рис. 2. 1. Кинематические схемы направляющего устройства подвески:
а – зависимой рессорной; б – зависимой балансирной; в – с четырьмя диагональными штангами; г – зависимой с тремя продольными и одной поперечной штангами


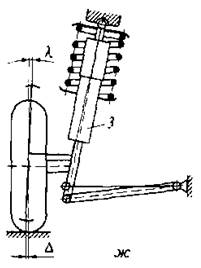




Рис. 2. 1. (продолжение) Кинематические схемы направляющего устройства подвески:
д – независимой двухрычажной с рычагами равной длины; е – независимой двухрычажной с рычагами разной длины; ж – независимой рычажно-телескопической; з…к - независимой однорычажной с качанием рычага в продольной, поперечной и диагональной плоскостях соответственно; л – независимой телескопической;
1, 1 - траектории движения рессоры и ведущего моста; 3 - амортизатор
Для обеспечения устойчивости и управляемости автомобиля, в частности, устойчивое прямолинейное движение, и снижения изнашиваемости шин, для подвесок управляемых колес должны быть заданы определенные значения установочных параметров: поперечный ( ) и продольный (
) и продольный ( ) углы наклона шкворня (оси поворота колеса); плечи обкатки колеса в поперечной (
) углы наклона шкворня (оси поворота колеса); плечи обкатки колеса в поперечной ( )и продольной (
)и продольной ( ) плоскостях; углы развала (
) плоскостях; углы развала ( ) и схождения (
) и схождения ( ) колес (схождение колес
) колес (схождение колес  ). При движении автомобиля эти параметры должны изменяться как можно меньше. Это, в значительной степени, зависит от кинематической схемы направляющего устройства подвески.
). При движении автомобиля эти параметры должны изменяться как можно меньше. Это, в значительной степени, зависит от кинематической схемы направляющего устройства подвески.
Кроме этого, кинематическая схема подвески оказывает влияние на такой параметр, как плечо крена, характеризующий поперечный угол наклона подрессоренной массы автомобиля. Этот параметр необходимо учитывать при расчете стабилизатора поперечной устойчивости.
Таким образом, кинематическую схему направляющего устройства подвески управляемых колес и размеры его элементов следует выбирать из условия выполнения следующих требований: обеспечение малых углов  поворота плоскости колеса; небольших изменений колеи и базы автомобиля; обеспечение необходимого статического и динамического прогибов подвески; ограничения поперечного угла наклона части подрессоренной массы автомобиля, приходящейся на рассматриваемую подвеску; согласованность кинематики направляющего устройства и рулевого привода; а также, согласованность перемещения управляемого колеса с угловыми перемещениями карданной передачи (в случае ведущего колеса).
поворота плоскости колеса; небольших изменений колеи и базы автомобиля; обеспечение необходимого статического и динамического прогибов подвески; ограничения поперечного угла наклона части подрессоренной массы автомобиля, приходящейся на рассматриваемую подвеску; согласованность кинематики направляющего устройства и рулевого привода; а также, согласованность перемещения управляемого колеса с угловыми перемещениями карданной передачи (в случае ведущего колеса).
Схема с двумя поперечными рычагами равной длины (рис. 2.1-д) полностью исключает изменение угла наклона плоскости вращения колеса, но приводит к значительному изменению колеи, что вызывает быстрое изнашивание шин. Аналогичная двухрычажная подвеска с рычагами разной длины (рис.2.1-е) – наиболее часть используемая схема подвески, позволяет минимизировать изменения угла наклона плоскости колеса и изменение колеи, за счет подбора геометрических параметров направляющего устройства: при отношении длин рычагов  угол составляет 5…60 (при соответствующем изменении угла ), а поперечное перемещение колеса
угол составляет 5…60 (при соответствующем изменении угла ), а поперечное перемещение колеса  -- не более 20…25 мм, что, как правило, компенсируется деформацией шины.
-- не более 20…25 мм, что, как правило, компенсируется деформацией шины.
Схема рычажно-телескопической подвески (рис.2.1-ж) предполагает один нижний рычаг и телескопическую пружинную стойку, которая совмещает функции направляющего, упругого, демпфирующего и поворотного устройств управляемого колеса. При использовании такой схемы подвески происходит незначительное изменением колеи, развала и схождения управляемых колес в ограниченном диапазоне прогибов подвески, что позволяет получить при этих прогибах малый износ шин и заданную устойчивость движения автомобиля. Такая схема направляющего устройства подвески позволяет получить большие прогибы, меньшую массу и число шарниров по сравнению с двухрычажной схемой.
Для трехостных автомобилей типичной подвеской среднего и заднего мостов является балансирная подвеска с полуэллиптической рессорой (рис.2.1-б). Такая схема подвески обеспечивает выравнивание вертикальных реакций на колесах обоих мостов, и приводит к тому, что вертикальное перемещение подрессоренной массы (кузова) в точке крепления оси балансира получается вдвое меньше, чем соответствующие перемещения колес мостов тележки. Кинематическая схема балансирной подвески должна обеспечивать выполнение следующих дополнительных требований:
-- обеспечивать достаточный динамический прогиб, если перемещения колес одинаковы по величине и противоположны по знаку;
-- обеспечивать минимальные горизонтальные перемещения рессоры относительно балки моста, которые вследствие высоких удельных давлений вызывают износ трущихся поверхностей рессоры и её опорной поверхности на балке моста;
-- обеспечивать минимальное угловое перемещение  , которое влияет на долговечность карданной передачи и равномерность вращения её валов.
, которое влияет на долговечность карданной передачи и равномерность вращения её валов.

