




Кожна автоматична система має свої особливості щодо структури, складу елементів та їх характеристик, показників функціонування і інш. Для спрощення задач аналізу та синтезу НЛС виділяються типові нелінійності – ланки, які мають певні характеристики і з їх допомогою можна подавати (відтворювати) нелінійні характеристики елементів різної природи. Можна провести аналогію з типовими сигналами, типовими елементарними ланками тощо. Виділення типових елементів, сигналів – один з ефективних методів теорії автоматичного керування.
При складанні диференціальних рівнянь в нелінійній системі виділяють, як правило, дві частини: приведену лінійну з передаточною функцією Wл(p) – всі лінійні елементи, в тому числі лінеаризовані несуттєві нелінійності, і суттєво нелінійну частину, яка характеризується залежністю  (рис.1.1).
(рис.1.1).
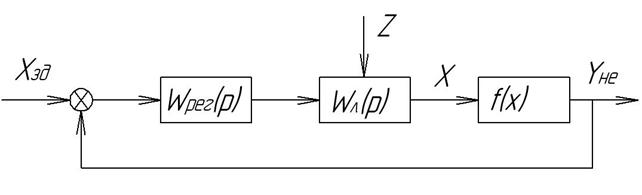
Рис.1.1. Узагальнена структура НЛС
При класифікації нелінійностей їх спочатку розбивають на дві групи: статичні та динамічні. Статичні нелінійності є безінерційними, вихідна величина яких в кожен момент часу залежить лише від вхідної в той же момент часу, тобто вихід і вхід безінерційного нелінійного елемента зв’язані між собою функціональною залежністю. Динамічні нелінійності описуються нелінійними диференціальними рівняннями, тобто вихідна величина залежить від вхідної та її похідної.
В задачах аналізу та синтезу АСР в більшості випадків можна обмежитись урахуванням статичних нелінійностей, які в свою чергу поділяють на дві групи: з однозначними характеристиками та неоднозначними.
Типові нелінійності з однозначними і неоднозначними характеристиками наведені відповідно в табл. 1.1 та 1.2.
Типові нелінійності з однозначними характеристиками мають такі особливості:
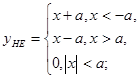
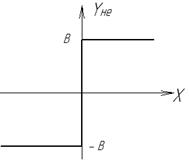
- статичні характеристики – однозначні функції Х;
- фазовий зсув в першій гармоніці вихідного сигналу дорівнює нулю.
Таблиця 1-1
Типові нелінійності з однозначними характеристиками
| № п/п | Нелінійність | Статична характеристика |
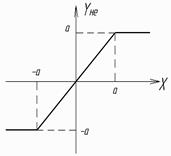
| 1. 2. 3. | Підсилювальний елемент (ланка) з обмеженням амплітуди Підсилювальний елемент (ланка) із зоною нечутливості Двохпозиційне реле |  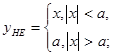
|
Таблиця 1.2
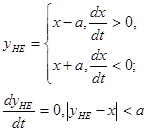
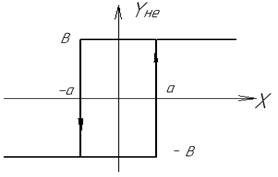
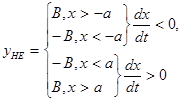
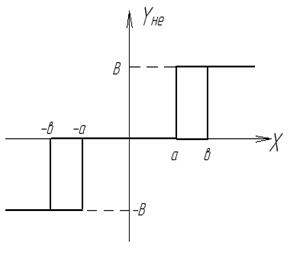
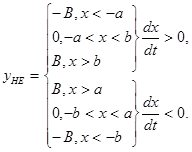
Типові нелінійності з неоднозначними характеристиками (гістерезисом)
| № п/п | Нелінійність | Статична характеристика |
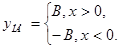
| 1. 2. 3. | Підсилювальний елемент із зоною застою Двохпозиційне реле із зоною повернення Трьохпозиційне реле із зоною нечутливості та зоною повернення | 
|
Наведені в табл.1-1 нелінійності є практично в кожній автоматичній системі: обмеження ходу регулюючого органу, межа чутливості, елементи сигналізації, перемикання і інш. Крім того, двохпозиційне реле крім звичайних функцій може використовуватись для форсування сигналів керування, зокрема для досягнення максимальної швидкодії.
Типові нелінійності з неоднозначними характеристиками мають такі особливості:
- статичні характеристики є неоднозначними функціями вхідного сигналу;
- вихідний сигнал залежить не лише від величини вхідного сигналу, а й від напряму його змінювання, тобто від знаку похідної 
- перша гармоніка змушених коливань на виході відстає від вхідного гармонічного сигналу за фазою.

