




При сплошном мониторинге состояния экосистем в заданном районе основной целью является обнаружение всех видов повреждений организмов, живущих в данном месте. Для примера в качестве объекта наблюдения будем рассматривать древесные растения.
Обнаружение повреждений древесных растений осуществляется в основном методами визуального поиска, поэтому в основе теории организации такого мониторинга лежат фундаментальные положения общей теории поиска объектов произвольной природы.
Примем следующие обозначения:
g - вероятность обнаружения искомого объекта за один прием наблюдения.
H – площадь поля фиксации наблюдательного средства
G – общая площадь поля наблюдения
 (8.1)
(8.1)
Тогда вероятность не обнаружения объекта за одни прием наблюдения равна  . А та же вероятность, но за n приемов составит:
. А та же вероятность, но за n приемов составит:
 (8.2)
(8.2)
 (8.3)
(8.3)
Вероятность обнаружения цели в этом случае может быть определена из следующего соотношения:

 (8.4)
(8.4)
Здесь φ – поисковый потенциал системы мониторинга.
Выражение (8.4) является основным уравнением теории поиска. Преобразования, выполненные в формуле (8.4), основаны на следующем известном в высшей математике преобразовании:

| (8.5) |
В рассматриваемом в работе случае поисковый потенциал системы мониторинга зависит от следующих переменных величин:
 (8.6)
(8.6)
Где:
v – скорость перемещения наблюдателя по обследуемой территории, км/час.
l – ширина полосы, обследуемой за один прием наблюдения одним наблюдателем, км.
N – число наблюдателей, чел.
Т – время наблюдения, час.
S – площадь экосистемы, на которой организуется система сплошного мониторинга ее состояния, км2.
Согласно основному уравнению теории поиска, поисковый потенциал должен быть безразмерной величиной, так как он стоит в показателе степени экспоненты. Отсюда получаем его вид в зависимости от определяющих его переменных с учетом размерностей последних:

| (8.7) |
Произведение  , имеющее размерность
, имеющее размерность  , часто называется производительностью поиска одного наблюдателя, и поисковый потенциал системы мониторинга тогда равен следующему выражению (8.8):
, часто называется производительностью поиска одного наблюдателя, и поисковый потенциал системы мониторинга тогда равен следующему выражению (8.8):
| (8.8) |
Основное уравнение теории поиска имеет следующую особенность: для обеспечения высоких вероятностей обнаружения всех без исключения искомых объектов, а в нашем случае ими являются повреждения деревьев или прочих биологических объектов, взятых в качестве индикаторов состояния окружающей среды, требуются очень большие величины поискового потенциала. Из выражения (8.8) очевидно, что числитель его имеет размерность площади, покрываемой системой мониторинга. Обозначим эту площадь как А. Тогда:
 (8.9)
(8.9)
Тогда основное уравнение (8.4) принимает следующий вид (8.10):

| (8.10) |
Из выражения (8.10) можно определить отношение  , соответствующее различным вероятностям обнаружения повреждений древесной растительности.
, соответствующее различным вероятностям обнаружения повреждений древесной растительности.
P=0,99 
P=0,95 
P=0,90 
P=0,65 
Таким образом, для безошибочного обнаружения всех без исключения повреждений растительности, например с вероятностью 99%, требуется многократное (почти пятикратное) обследование территории. Поэтому на практике рекомендуется принимать значение вероятности обнаружения повреждений равное 65-70%, соответствующее полному, но однократному обследованию контрольной территории.
Основное уравнение позволяет определить следующие важные для организации мониторинга величины:
· Время, необходимое для проведения мониторинга на заданной площади данным числом наблюдателей

| (8.11) |
· Совокупную производительность поиска, необходимую для заданной территории за данное время

| (8.12) |
· Необходимое число наблюдателей с заданной производительностью поиска для проведения мониторинга на заданной территории за данное время

| (8.13) |
· Площадь лесов, на которой возможно провести мониторинг при имеющихся средствах

| (8.14) |
Мониторинг лесов может проводиться с помощью различных технических типов средств наблюдения (например, наземных и авиационных), в этом случае основное уравнение принимает следующий вид:

| (8.15) |
Где  - поисковый потенциал i-го типа средств наблюдения.
- поисковый потенциал i-го типа средств наблюдения.
Распределение площади лесов, подлежащей мониторингу, между различными типами средств наблюдения целесообразно осуществлять исходя из минимизации совокупного поискового потенциала:
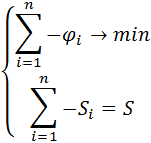
| (8.16) |
Для решения этой экстремальной задачи используем метод неопределенных множителей Лагранжа. Для этого построим функцию Лагранжа, возьмем ее производные по площади и приравняем к нулю.

| (8.17) |
Здесь q – неопределенный множитель Лагранжа.

| (8.18) |
Из выражения (8.18) следует, что:

| (8.19) |
Это и есть выражение, позволяющее определить распределение площадей под мониторинг различными типами средств наблюдений.
Пусть n=2 тогда из (8.19) получаем:

Откуда следует, что:
| (2.20) |
Выражение (8.20) вместе с условием  позволяет вычислить площади, предназначенные для мониторинга различными типами технических средств наблюдения, минимизирующие совокупный поисковый потенциал.
позволяет вычислить площади, предназначенные для мониторинга различными типами технических средств наблюдения, минимизирующие совокупный поисковый потенциал.
Распределение площади лесов для контроля различными средствами может быть осуществлено по экономическому критерию минимизации стоимости проведения мониторинга. В этом случае в выражении (8.20) величины производительности поиска  должны быть заменены на стоимости использования соответствующих технических средств наблюдения
должны быть заменены на стоимости использования соответствующих технических средств наблюдения  . В остальном полученные формулы не изменятся.
. В остальном полученные формулы не изменятся.
Контрольное задание
1. Обосновать величины производительности поиска повреждений деревьев (определить величину u) для следующих типов средств наблюдения:
Таблица 8.1.
Исходные данные
| Вар. | Тип наблюдательного средства | N, шт | S, тыс га | Т, дней |
| Наземный пеший | ||||
| Авиационный легкомоторный | ||||
| Авиационный вертолетный | ||||
| Авиационный самолетный | ||||
| Пеший наземный | ||||
| Авиационный вертолетный |
Принять величину вероятности обнаружения повреждений 
Продолжительность рабочего дня принять равной 8 часам.
2. Определить площадь лесов, на которой можно организовать мониторинг следующими силами:
Таблица 8.2.
Исходные данные
| Вар. | Тип наблюдательного средства | N. | Т | v, км/час | l, м. |
| Пеший наземный | 1 месяц | ||||
| Авиа. легкомоторные | 7 дней | ||||
| Авиа. вертолет | 7 дней | ||||
| Самолет | 7 дней | ||||
| Пеший наземный | 20 дней | ||||
| Вертолет | 10 дней |
l – ширина полосы наблюдения, м.
Продолжительность рабочего дня принять равной 8 часам.
3. Необходимо провести мониторинг состояния лесов за два месяца на известной площади.
Определить:
А) Необходимую совокупную производительность поиска (u·N).
Б) Необходимое число единиц наблюдателей различного типа:
Таблица 8.3.
| Тип наблюдательного средства | v, км/час | l, м. |
| Пеший наземный | ||
| Авиа. легкомоторный | ||
| Авиа. вертолет | ||
| Самолет |
Таблица 8.4.
Исходные данные
| Вар | S, тыс га | Т, мес |
| 1. | 1278,5 | |
| 2. | 948,6 | |
| 3. | 881,7 | |
| 4. | 269,8 | |
| 5. | 663,4 | |
| 6. | 614,0 | |
| 7. | 615,2 | |
| 8. | 197,7 | |
| 9. | 600,1 | |
| 10. | 335,0 | |
| 11. | 267,5 | |
| 12. | 72,1 |
4. Распределить площадь лесов (табл. 8.4) для мониторинга указанными в табл. 8.3. средствами, если имеются следующие ресурсы:
Таблица 8.5
Исходные данные для распределения площадей мониторинга
| Тип наблюдательного средства | N | Т |
| Пеший наземный | 100 чел | 1 месяц |
| Авиа. легкомоторный | 10 шт | 7 дней |
| Авиа. вертолет | 1 шт | 3 дня |
| Самолет | 1 шт | 1 день |
Занятие 9

