




Введение
Целями данной курсовой работы являются:
- сравнительный анализ параметров и характеристик разрабатываемой системы мобильной и пейджинговой связи;
- выбор способа формирования рабочей зоны и антенных комплексов для базовых станций и ретрансляторов;
- предварительное проектирование коммуникационных ячеек и позиций базовых станций с учетом характеристик используемых стандартов RDS для пейджинговой связи и GSM -900– для сотовой связи;
- предварительный расчет качества радиопокрытия зоны обслуживания с использованием имеющихся моделей радиоволн и характеристик местности для сотовой связи;
- составление территориально-частотного плана зоны обслуживания, представляющего собой распределение частотных каналов в соответствии с принципом повторного использования частот;
- предварительная оценка для системы сотовой связи интенсивности телетрафика и емкости для наиболее характерных или критичных участков и сети в целом на основе моделей B,C Эрланга.
В данной работе требуется разработать систему пейджинговой и сотовой связи для покрытия города Гаврилов Ям, общая численность которого составляет 18,2 тыс. человек, а площадь – 11 000 000 м2. Для обоснования целесообразности использования сотовой системы связи опеределенной конфигурации проведем экономический расчет для подтверждения «выгодности» ее использования по истечению 10 лет.
В связи с большим объемом расчетов, целесообразно разработать студенческий САПР «Частотное планирование» в среде Microsoft EXCEL с возможностью использования языка программирования Visual Basic.
Проектирование системы пейджинговой связи
В данном разделе проведем расчет и анализ системы педжинговой связи в САПР «Частотное планирование». Также построим структуру зоны обслуживания города Гаврилов Ям.
Общие сведение об объекте проектирования
Системы персонального радиовызова (СПРВ), или пейджинговые системы (от английского термина paging – поиск), представляют собой системы мобильной радиосвязи, обеспечивающие одностороннюю передачу коротких сообщений из центра системы (терминала персонального радиовызова, или пейджингового терминала) на миниатюрные абонентские приемники (пейджеры), причем передаваемые сообщения могут быть четырех типов – тональные, цифровые, буквенно-цифровые и речевые.
Отличительной чертой СПРВ служит ее работа вне реального времени, т.е. сообщения передаются не в момент его выдачи отправителем, а в порядке очереди, устанавливаемой центром управления, хотя на практике величина задержки между моментом отправления и получения не превышает нескольких минут.
Для передачи сообщения от абонента сети требуемому мобильному абоненту СПРВ используется радиоканал между базовым передатчиком и носимым терминалом абонента (радиоприемником). Вызывные сообщения от телефонного абонента поступают на базовый передатчик через контрольно-оконечную станцию (КОС), подключенную к стационарной сети – рисунок 1.
Мобильные системы персонального вызова предназначены для организации вызова абонентов, местоположение которых неизвестно. Так как абоненты системы могут перемещаться в пространстве (являются мобильными), то процесс вызова требуемого абонента соответствует его поиску. Каждый мобильный абонент системы имеет индивидуальное радиоприемное устройство – пейджер, представляющий собой миниатюрный радиоприемник со встроенной рамочной антенной, объемная диаграмма направленности которой представляет собой сферу.
Рисунок 1 – Организация радиосвязи в СПРВ
В отличии от сотовых и транкинговых (пучковых) систем мобильной радиосвязи, использующих общую группу свободнодоступных рабочих частот (trunk), пейджинговые системы работают на одной рабочей частоте, на которую настраиваются базовый радиопередатчик и пейджеры системы. Вызов требуемого мобильного абонента осуществляется путем передачи цифровой кодограммы, содержащей номер (адрес) вызываемого пейджера. Другие пейджеры отвергают этот адрес как чужеродный сигнал внешней помехи. Кроме адресного признака кодограмма вызова включает также информационную часть, состоящую из совокупности формализованных команд и сообщений, в соответствии с которыми действует пользователь пейджера. Вызывающим абонентом является абонент стационарной телефонной сети общего пользования (PSTN), который осуществляет заявку на вызов. Заявка на вызов по телефону через АТС поступает на контрольно-оконечную станцию (КОС) или центр пейджинговой связи системы персонального радиовызова, которая формирует кодограмму вызова и подает ее на базовый радиопередатчик по модуляционной линии
Пейджинговая радиосистема, предназначена для массового обслуживания пользователей и может рассматриваться как специфическая система управления, для которой должны выполняться следующие основные требования:
1) обеспечение передачи заданного объема сообщений;
2) минимальное время доставки сообщения мобильному абоненту;
3) обеспечение заданной достоверности доставляемой информации.
1.2 Способы расширения зоны обслуживания пейджинговой системы связи
Для расширения зоны обслуживания пейджинговой системы связи используют ретрансляторы путем добавления к основной рабочей зоне соседних (пригород, зоны отдыха) или удаленные на десятки километров (райцентры и др.), а также для «подсветки» радиозатененных участков основной рабочей зоны.
По технологии организации связи можно выделить три способа построения ретрансляторов:
· трансляция с использованием эхо-репиторов;
· технология «simulcast» (косвенно относящаяся к системам ретрансляции);
· сотовая технология.
Сотовый принцип построения систем связи обеспечивает высокую надежность приема сигналов на обслуживаемой территории и позволяет в дальнейшем расширять зону обслуживания за счет рационального размещения вновь вводимых передающих устройств. Основной проблемой при построении сотовой (многозоновой) сети является взаимное влияние (интерференция) сигналов соседних радиопередающих устройств (рисунок 1.2). Для устранения этого эффекта применяется либо синхронное (simulcast) вещание, либо временное разделение передаваемых сообщений.

Рисунок 1.2 – Схема взаимного влияния сигналов радиопередатчиков
В сетях синхронного вещания (технология «simulcast») передатчики работают одновременно, но пейджер «не замечает» их взаимного влияния и принимает сигнал лишь одного определенного передатчика. Это позволяет достичь максимальной абонентской емкости в сети (примерно 20 тыс. абонентов при применении стандарта РОСSАG со скоростью передачи информации 1200 бит/с). Однако платой за это является высокая цена аппаратуры и очень жесткие требования к каналам связи. Существует другой вариант построения синхронного вещания, когда управление передатчиками осуществляется на служебной (дополнительной) частоте. Это требует дополнительного разрешения Госкомсвязи РФ на использование служебной частоты. Данный вариант значительно ограничивает дальность прямой радиовидимости, которая определяется радиусом действия центральной передающей станции, излучающей сигналы на служебной частоте. В настоящее время синхронное вещание нашло свое применение лишь в пяти крупных городах России, поэтому оно, скорее всего, исключение, чем правило.
Способ разделения сигналов в региональных сетях, основан на применении пейджинговых репиторов. В этом случае каждая базовая станция оборудуется не только передатчиком, но и приемником пейджинговых сообщений, работающими на одной частоте. Во время передачи сигналов соседними станциями сообщения поступают в приемник и накапливаются в специальном буфере, а в определенное время (временное окно), приписанное данной базовой станции, они передаются (рисунок 1.3). Однако применение в сети одного пейджингового репитора приводит к снижению абонентской емкости системы примерно в 2 раза.
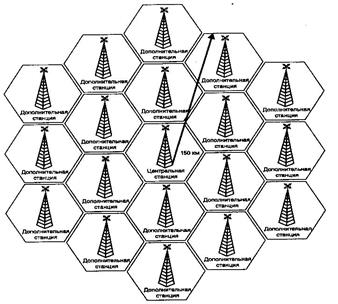
Рисунок 1.3 – Передача информации с применением пейджинговых репиторов
1.3 Описание принципов и особенностей функционирования и протокола системы пейджинговой связи стандарта RDS
Разрабатываемая пейджинговая система строится по стандарту RDS.
Многоцелевой стандарт RDS (Radio Data System), предназначен для передачи пейджинговых сообщений по каналам радиовещания ЧМ в диапазоне УКВ. В 1983 г. стандарт RDS был принят членами Европейского радиовещательного союза (EBU) в качестве единого многоцелевого стандарта. Отличительной особенностью данного стандарта является использование его при передаче в сетях радиовещания и телевидения (радиовызов на поднесущей вещательного диапазона).
Стремление к более эффективному использованию существующих систем связи привело к тому, что через имеющиеся сети вещательных радиопередатчиков наряду с обычной информацией в настоящее время производится передача дополнительной информации. Такая дополнительная информация не слышна обычному абоненту, не мешает работе обычных приемников, и принимать ее можно только при наличии в приемниках специальных функциональных узлов. Основными видами такой информации являются:
информация для водителей автотранспорта (Autofar Rundfunk Information - ARI, VRS), называемая в литературе дорожной информацией;
собственно дополнительная информация, например, сигналы времени, сигналы управления приемником, радиотекст, и т.п.
Дополнительная информация может передаваться в диапазоне 150-1600 кГц (ДВ и СВ) или в УКВ диапазоне 87,5-104 МГц. В связи с тем, что в диапазонах ДВ и СВ используется, как правило, АМ-вещание, а в УКВ диапазоне - ЧМ, введение дополнительных сигналов имеет ряд особенностей в зависимости от используемого диапазона. В силу значительной развитости сети УКВ ЧМ вещательных передатчиков в Западной Европе, США, Японии, передача дополнительной информации на УКВ получила широкое развитие и осуществляется уже длительное время, с начала 80-ч годов. Использование же для этих целей станций с АМ носит пока в основном экспериментальный характер. Небольшой радиус действия вещательных УКВ ЧМ передатчиков позволяет создавать локальные региональные зоны обслуживания. Системы передачи данных, использующие стандарт RDS (Radio Data System), являются в настоящее время наиболее распространенными.
Основные параметры стандарта RDS:
Частота поднесущей - RDS 57 кГц
Частота пилот-тона (pilot-tone) - 19 кГц ± 3 кГц
Допустимое отклонение частоты поднесущей RDS - ± 6 Гц
Номинальная девиация несущей RDS- ± 1,2 кГц
Скорость передачи данных - 1187,5 ± 0,125 бит/с
В настоящее время большинство HI-FI приемников и автомагнитол оборудованы блоками для приема данных в системе RDS.
Структура сигнала
Передача дискретной информации требует сравнительно большой ширины частотного спектра. На рисунке представлен спектр излучения ЧМ станции при передаче стереосигнала по системе с пилот-тоном.

Рис 1.2 Спектр излучения ЧМ станции при передаче стереосигнала по системе с пилот-тоном.
Слева расположена полоса частот, простирающаяся от 40 Гц до 15 кГц, которая принимается обычным монофоническим приемником. Она содержит сумму сигналов правого и левого звуковых каналов (L + R), передаваемых в стереофонической системе. Правее по оси, на частоте 19 кГц, расположен пилот-сигнал, и далее, две боковых полосы частот модуляции с подавленной поднесущей 38 кГц (L - R), которые предназначены для стереофонической передачи звука.
Излучение сигналов RDS происходит около частоты 57 кГц, которая является третьей гармоникой пилот-сигнала. Подавление частоты поднесущей в системе RDS не производится. Это одно из условий ее совместимости с аналогичной системой передачи данных ARI, разработанной ранее в Германии и в Австрии для трансляции дорожной информации владельцам автомобилей.
Модуляция поднесущей 57 кГц амплитудная, при этом модулирующий сигнал цифровой. Скорость его передачи составляет 1187,5 бит/с. Для надежной передачи сигналов малого уровня, сравнимого с уровнем помех, цифровые сигналы предварительно кодируются дифференциальным и бифазным способами. Такая кодировка позволяет уменьшить число ошибок при приеме даже слабых сигналов.
Информация передается пакетами. Объем одного пакета составляет 104 бит и включает в себя четыре блока по 26 бит. Каждый блок состоит из информационного слова длиной 16 бит, в котором передаются данные, и контрольного (проверочного) слова из 10 бит.
Первый блок каждого пакета содержит в информационном слове коды, идентифицирующие пакет (код радиостанции PI, номер пакета PIN и другие). В третьем и четвертом блоках размещено по 16 бит данных, выводимых на табло приемника. Во втором блоке передаются коды, определяющие характер этих данных, например, TP и PTY.
Контрольная группа - это код, корректирующий данные информационного слова. Он позволяет надежно обнаружить все одиночные и двойные ошибки, которые могут возникнуть при передаче, а также цепочки ошибок длиной до 10 бит. С меньшей вероятностью обнаруживаются более длинные цепочки ошибочных данных. Корректирующая способность контрольного кода обеспечивает возможность исправления всех одиночных ошибок и цепочек ошибок длиной до 5 бит. Это позволяет детектировать слабые сигналы и безошибочно принимать данные при значительном уровне помех.
Сервисные возможности
В настоящее время насчитывается более двух десятков RDS-функций. Одни из них широко используются, другие лишь поддерживаются стандартом, но не используются, или используются ограниченно, использование третьих специалистами только обсуждается. Поэтому остановимся на рассмотрении нескольких, наиболее распространенных приложений:

