




Двигатели постоянного тока классифицируются по способу включения обмотки возбуждения по отношению к якорю. В соответствии с этим имеем двигатели: а) параллельного возбуждения, б) последовательного возбуждения, в) смешанного возбуждения.
ДПТ использ-я в промыш-сти, там, где необход-о широкое и плавное регулирование скорости вращ-я (прокат.станы, мощные Ме режущ.станки).
ДПТ класс-ся по спос-бу возб-ия:
1). независимого:
-возбуждение с пом-ю пост. маг.
2). самовозб-ем:
- с парал-ным возб-ем
- с посл-ым возб-ем
- со смеш-м возб-ем


В Д НВ токи якоря Iа и нагрузки I равны. В Д паралл. и смеш. I= Iа+iв. В Д послед.возб. I= Iа= iв
4.6 Рабочие характеристики ДПТ
3 вида:
1 ) пусковые; 2) рабочие; 3) регулировочные.
Рабочие хар-и – зависимость потреб-й мощности Р1, потребл-го тока I, скорости n, момента М и кпд от полезной мощности Р2 при U = const и неизменных положениях регулирующих реостатов.
Раб. хар-и Д парал-го возбуждения малой мощности при отсутствии добавочного сопрот-я в цепи якоря

Одновр-о с увелич-м мощности на валу Р2 растет и момент на валу М. Поскольку с увелич-м Р2 и М скорость n неск-ко уменьш-ся, то М= Р2/ n растет неск-ко быстрее Р2. Увелич-е Р2 и М, сопровожд-ся увелич-м тока дв. I. Пропорц-о I растет потреб-я из сети мощность Р1. При х.х. (Р2=0), кпд η=0, затем с увелич-м Р2 сначала η быстро растет, но при больших нагрузках в связи с большим ростом потерь в цепи якоря η снова начинает уменьш-я.
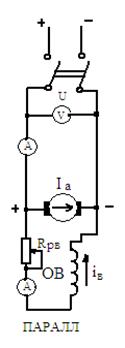
Схема снятия раб.хар-к д/ незав-го и паралл-го возб.

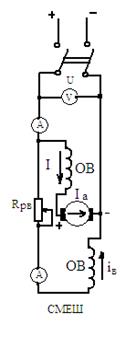
Схема снятия раб.хар-к д/ послед-го возбужд-я.
RB – реостат цепи возб-я (д/регул-я тока возб-я)
RП – пусковой реостат (для ограничения тока при пуске);
RРТ – регулиров-й реостат частоты вращения при снятии мех.хар-к.
RП = 0, RРТ = const.

