




Лабораторная работа № 128
ИЗУЧЕНИЕ ЗАТУХАЮЩИХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ
ПРУЖИННОГО МАЯТНИКА
Цель работы:
Определение декремента затухания, силы сопротивления вязкой среды, и добротности колебательной системы при колебаниях подвешенного на пружине тела в вязкой среде.
Метод измерения и расчётные соотношения.
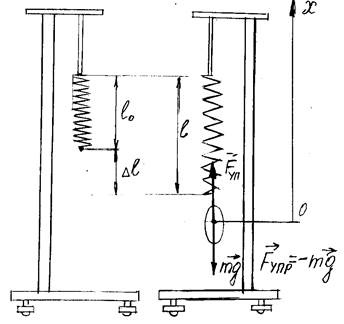
Пружинным маятником называется система, состоящая из упругой пружины и груза подвешенного на ней. В общем случае движение пружинного маятника в поле силы тяжести довольно сложно и описывается большим числом степеней свободы. Практический интерес, однако, представляют колебания с одной степенью свободы, когда движение маятника происходит вдоль вертикальной оси.
|
| Рис.1 |
Для полного описания колебаний в этом случае необходимо знать поведение только одной переменной, например, вертикальной координаты центра масс тела маятника. Теоретически пружинный маятник может совершать незатухающие механические колебания при условии, что пружина является идеально упругой, а тело движется в окружающей среде без трения. На тело, подвешенное на пружине в поле силы тяжести, действуют две силы (без учета сил трения) сила тяжести  и упругая сила
и упругая сила  . Начало координат выберем в центре тяжести тела. При этом сила тяжести будет скомпенсирована некоторым начальным растяжением пружины Δl в дальнейшем рассмотрении участвовать не будет.
. Начало координат выберем в центре тяжести тела. При этом сила тяжести будет скомпенсирована некоторым начальным растяжением пружины Δl в дальнейшем рассмотрении участвовать не будет.
При отклонении тела от точки равновесия будет возникать возвращающая сила F(х). Рассмотрим колебания пружинного маятника с малой амплитудой. Для пружинного маятника условия малости колебаний удовлетворяются при смещениях, Уравнение движения пружинного маятника при этом имеет вид

| (1) |
где: k - коэффициент жесткости пружины, m - масса маятника. 
Если физическая величина x(t) изменяется со временем по гармоническому закону
| (2) |
то колебания называются гармоническими. В функции (2) А — амплитуда колебаний;w - круговая частота

|
T — период колебаний; t — время, пошедшее от начала колебаний; φ0—начальная фаза колебаний. Функция х{t) из (1) представляет решение дифференциального уравнения

| (3) |
называемого уравнением свободных колебаний. Физическую систему, выведенную из состояния равновесия и представленную самой себе, в которой изменение одного из параметров х описывается дифференциалльным уравнением (3) называют классическим гармоническим осциллятором. Сравнивая (2) с (2), получим

| (4) |
В реальных осцилляторах, за счет сил сопротивления (в большей степени трения), происходит рассеяние (диссипация) запасенной энергии, в результате чего свободные колебания со временем затухают. Если жидкость неподвижна, а скорость движения тела невелика, то перемещение тела не оказывает влияния на удалённые слои жидкости. Взаимодействие происходит только со слоем, непосредственно соприкасающимся с телом. При движения пружинного маятника в вязкой среде, с небольшими скоростями сила сопротивления пропорциональна скорости движения

| (5) |
где коэффициент r зависит от вязкости среды и площади соприкосновения поверхности S
тела с жидкостью
| r ~ηS | (6) |
где η – коэффициент внутреннего трения жидкости (динамическая вязкость жидкости)
Дж. Стокс эмпирически установил, что для тел сферической формы радиуса R коэффициент сопротивления равен  . Следовательно, сила сопротивления среды равна
. Следовательно, сила сопротивления среды равна

| (7) |
При равномерном движении сферы в идеальной (не вязкой) жидкости, она не испытывает никакого сопротивления. Выводы Стокса для сферы верны также для эллипсоида вращения и других тел с подобными поверхностями.
Сила Архимеда, действующая, на груз и направленная в одну и ту же сторону, будет скомпенсирована некоторым начальным растяжением пружины Δl в дальнейшем рассмотрении участвовать не будет.
Для описания движения груза пружинного маятника в вязкой среде необходимо в правую часть уравнения (1) величину силы трения (5). Поэтому свободные колебания будут затухающими (следовательно, не гармоническими). В результате второй закон динамики для механического осциллятора при наличии вязкого трения можно записать так:

| (8) |
где  - коэффициент затухания;
- коэффициент затухания;  - собственная частота незатухающих колебаний.
- собственная частота незатухающих колебаний.
Можно показать, что решением этого уравнения является функция

| (9) |
где  - частота затухающих колебаний.
- частота затухающих колебаний.
Отношение двух соседних амплитуд  называется декрементом затухания.
называется декрементом затухания.
Величина  - называется логарифмическим декрементом затухания.
- называется логарифмическим декрементом затухания.
По истечение N колебаний эта величина определяется по формуле

| (10) |
Энергия пружинного маятника пропорциональна квадрату амплитуды колебаний

| (11) |
где  - энергия пружины при максимальной начальной амплитуде, то есть начальный запас энергии пружинного маятника.
- энергия пружины при максимальной начальной амплитуде, то есть начальный запас энергии пружинного маятника.
Потеря энергии маятника за период равна

| (12) |
Из (10) и (11) следует

| (13) |
При малых затуханиях  и соотношение (12) можно преобразовать к виду
и соотношение (12) можно преобразовать к виду

| (14) |
Описание схемы установки.
На Рис. 2 представлена схема установки. На платформе 1 расположены стойка 3, к которой подвешена пружина 8, стеклянный цилиндр с жидкостью 4, секундомер 2 для отсчёта числа колебаний за установленные интервалы времени, инфракрасный датчик 9 для отсчёта числа колебаний флажка 7, закреплённого на штоке 6. На штоках 6 крепятся грузы - металлический шар или эллипсоид. Консоль 11 держит подвесную систему.
Для проведения опытов необходимы следующие средства измерений:
1.Электронный секундомер с точностью отсчёта ± 0,01с, для измерения времени и установленного числа колебаний груза. В установке используется программируемый электронный секундомер, измеряющий число прохождений флажка 7 через луч датчика 9 за установленное время (10 секунд).
2. Линейка с миллиметровой шкалой 10, закреплённая на стойке 3, для измерений смещений груза по вертикали.
Выполнение работы.
1. Вращением ножек основания установить стойку 3 в вертикальное положение.
2. Измерить с помощью линейки длину пружины без груза  .
.
3. Установить консоль 11 так чтобы подвесная система находилась вне цилиндра 4, закрепить на конце пружины шток 6 с выбранным грузом (металлические шар или эллипсоид известной массы) и измерить длину пружины с грузом  , отсчитав положения её первого и последнего витка по миллиметровой шкале.
, отсчитав положения её первого и последнего витка по миллиметровой шкале.
4. Установить консоль 11 так, чтобы подвесная система находилась внутри цилиндра 4.
5. Включить секундомер 2.
6. С помощью штока 6 переместить груз вертикально вниз до момента пересечения флажком 7 луча датчика 11. При этом измеритель числа колебаний должен показать О. Произвести отсчёт на миллиметровой шкале 12 положения флажка 7 (начальное отклонение груза  от положения равновесия).
от положения равновесия).
7. Отпустить шток 6 и привести в движение маятник.
8. По истечении установленного времени (10 секунд отсчитываются прибором автоматически и не показываются на табло счётчика) записать показания электронного счётчика, который измерит число Z прохождений флажка через луч датчика 9 за десять секунд.
9. Нажать кнопку 13 электронного счётчика. При этом он покажет общее число прохождений флажка 7 через луч датчика 9 от начала процесса колебаний.

|
| Рис. 2 |
10. Произвести отсчёт амплитуды выбранного последнего колебания  флажком 7 на шкале
флажком 7 на шкале
11. Для статистической обработки измеренных величин пункты 6 и 10 повторить не менее 5 раз.
12. Повторить для двух грузов – шара и эллипсоида.

