Информация об углах крена и тангажа необходима для пилотирования и обеспечения функционирования ряда бортовых самолет (систем автоматического управления, антенн, курсовых систем и т.д.).
Для определения углов крена и тангажа с помощью авиагоризонта на борту самолета необходимо построить вертикаль места, которая определяет перпендикулярную к ней горизонтальную плоскость. В соответствие с этим базовым элементом авиагоризонта должен быть построитель вертикали.
Так как направление истинной вертикали совпадает с вектором силы тяжести G, для определения этого направления в принципе можно использовать маятник. Однако на самолете, полет которого практически всегда происходит с ускорениями, поставленная цель не будет достигнута, так как маятник будет стремиться устанавливаться по равнодействующей сил тяжести и инерции, обусловленной ускорением, т.е. по направлению так называемой кажущейся вертикали. Непригоден для этого и свободный гироскоп, ротор которого сохраняет неизменную ориентацию в мировом пространстве. Из-за вращения Земли и движения объекта относительно нее положение вертикали относительно гироскопа будет изменяться. Поэтому наблюдатель на объекте будет отмечать изменяющиеся во времени отклонения оси ротора гироскопа от вертикали (если ось ротора первоначально была установлена вертикально).
По указанным причинам применяют системы построения вертикали, базирующиеся на трехстепенном гироскопе с маятниковой коррекцией, чем достигается осреднение случайных колебаний маятника в полете. При больших ускорениях цепи коррекции отключают и используют для определения вертикали только гироскоп, способный выполнять такую задачу с точностью, зависящей от длительности некорректируемого режима.
Принцип построения авиагоризонтов наиболее простой кинематической схемы для маломаневренных самолетов и вертолетов поясняется на рис. Ось внешней рамки (2) расположена параллельно продольной оси ВС. Маятниковые чувствительные элементы (3) и (4) размещены на внешней рамке и гироузле (1) соответственно. При отклонениях оси Z ротора гироскопа от вертикали сигналы элемента (3) подаются на моментный двухфазный электродвигатель М2 поперечной коррекции, а сигналы элемента (4) – на аналогичный электродвигатель М1 продольной коррекции.
Вставка
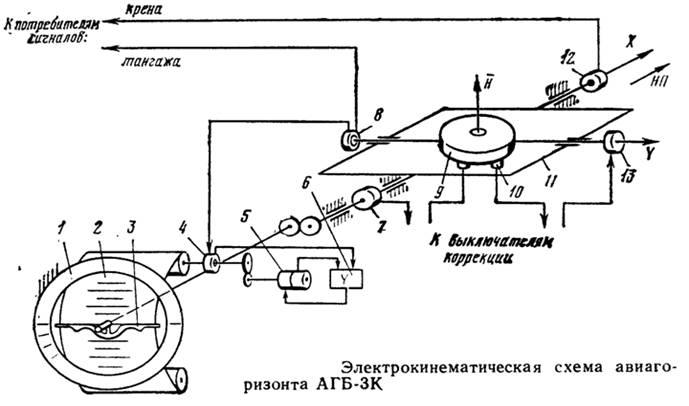
Электрическая маятниковая коррекция, состоящая из двух одноосных жидкостных маятниковых датчиков 3 и 4 и коррекционных моторов М1 и М2, определяет истинную вертикаль и создает на осях карданова подвеса гироскопа моменты, вызывающие прецессионное движение главной оси гироскопа к вертикальному направлению
В результате ось гироузла Y удерживается в горизонтальной плоскости и является осью измерения углов тангажа J. Осью измерения углов крена g служит ось внешней рамки. Такую кинематическую схему имеет, например, авиагоризонт АГБ-3. Сигналы углов g и J выдаются сельсинами СД g и СД J.
Электросхема одного из каналов коррекции показана на рис. Маятниковый элемент представляет собой стеклянную ампулу (1) с токопроводящей жидкостью и воздушным пузырьком (2). Из-за смещений пузырька при отклонениях оси АА элемента от вертикали площади соприкосновения поверхностей контактов (3) и (5) с жидкостью становятся неодинаковыми, вследствие чего сопротивления между контактами (3)-(4) и (5)-(4) будут различны. Это обусловит различие магнитных потоков управляющих обмоток W1 и W2 электродвигателя М, в результате чего он приложит к гироскопу корректирующий момент, восстанавливающий ось ротора гироскопа к вертикали.
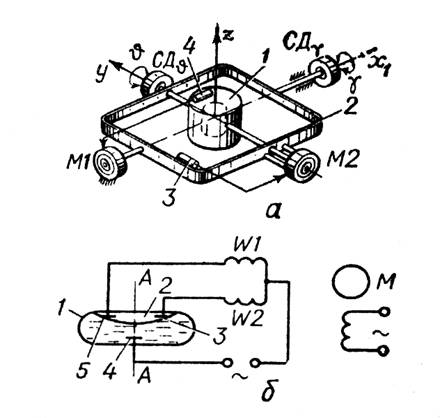 |
К принципу построения авиагоризонта:
а - кинематическая схема (1 - гироузел; 2 - внешняя рамка; 3 и 4 - маятниковые чувствительные элементы); б - электросхема канала коррекции (1 - стеклянная ампула; 2 – воздушный пузырек; 3, 4, 5 - контакты)
Авиагоризонты рассмотренной кинематики не пригодны для самолетов неограниченного маневрирования, так как при J=±90° оси ротора и внешней рамки совмещаются, что приводит к выбиванию гироскопа.
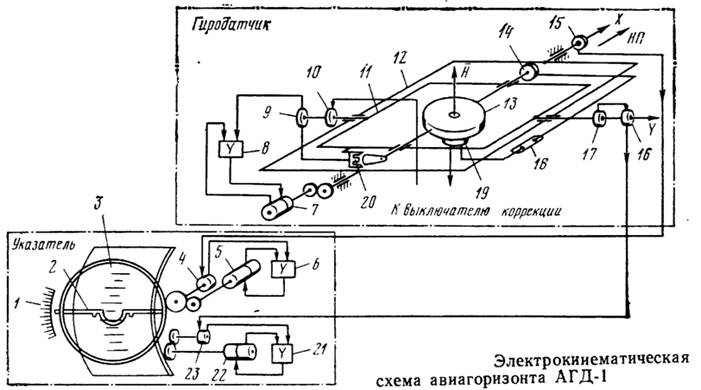
Современные дистанционные авиагоризонты имеют в своей основе трехстепенной гироскоп с осью наружной рамы, параллельной поперечной оси самолета и установленной в дополнительной (следящей) раме крена. Это обеспечивает невыбиваемость гироскопа.

Два авиагоризонта АГБ-3К сер.2 и АГБ-3К сер.3




Авиагоризонт АГД-1 под красный подсвет