




Скольжение асинхронного двигателя — относительная разность скоростей вращения ротора и изменения переменного магнитного потока, создаваемого обмотками статора двигателя переменного тока. Скольжение может измеряться в относительных единицах и в процентах.
 где n — скорость вращения ротора асинхронного двигателя
где n — скорость вращения ротора асинхронного двигателя
Из этого выражения следует: n = (1 - s) n 0.
 или
или 
Частота тока ЭДС в обмотке ротора пропорциональны скольжению.
ЭДС потока рассеяния ротора  .
.
Уравнение электрического состояния ротора обмотки

Индуктивное сопротивление рассеяния при вращающемся роторе

Действующее значение тока в фазе вращающегося ротора.

Коэффициент мощности

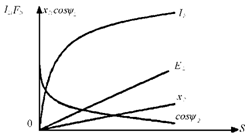
9. Рабочие характеристики асинхронного двигателя
 Зависимость К.П.Д., скорости, тока, вращающегося момента, cosφ, от мощности на валу, при
Зависимость К.П.Д., скорости, тока, вращающегося момента, cosφ, от мощности на валу, при  и
и  (называют рабочими характеристиками двигателя.
(называют рабочими характеристиками двигателя.

Ток статора I1, возрастает с увеличением отдаваемой мощности, но при Р2 = 0 имеется некоторый ток холостого хода I0..В связи с тем что ток статора асинхронного двигателя I1 имеет реактивную (индуктивную) составляющую, необходимую для создания магнитного поля в статоре, коэффициент мощности асинхронных двигателей меньше единицы. Наименьшее значение коэффициента мощности соответствует режиму холостого хода. Объясняется это тем, что ток холостого хода электродвигателя I0 при любой нагрузке остается практически неизменным. Поэтому при малых нагрузках двигателя ток статора невелик и в значительной части является реактивным (I1 ≈ I0). В результате сдвиг по фазе тока статора относительно напряжения получается значительным (φ1 ≈ φ0), лишь немногим меньше 90° (рис. 2).
При увеличении нагрузки выше номинальной значительно увеличиваются магнитные потоки рассеяния, реактивная составляющая тока и реактивная мощность, угол φ увеличивается, cosφ - уменьшается. Таким образом, cosφмаксимален при номинальной нагрузке и уменьшается при недогрузке и перегрузке.
Зависимость между моментом М и полезной мощностью Р2 определяется соотношением
Р2 = М2 ω2,
где ω2 — угловая скорость ротора.
Поскольку n2 изменяется мало, эта зависимость близка к линейной. Чтобы определить моментМ2 на валу двигателя, по круговой диаграмме находят электромагнитный момент М, а затем из него вычитают момент, обусловленный трением в двигателе, — Мт = ΔРт /ω2:
М2 = М - Мт.
Мощность Р2,отдаваемая машиной (Рэл в генераторах и Рмех в двигателях), пропорциональна току нагрузки I в первой степени, поэтому зависимость КПД от тока нагрузкиПри увеличении номинальной мощности относительная величина суммарных потерь уменьшается. Следовательно, должен возрастать и КПД машины. Эта закономерность проявляется во всех типах вращающихся электрических машин и в трансформаторах — машины большей.
10. Электромагнитный момент асинхронных машин
Для устойчивой работы двигателя необходимо, чтобы автоматически устанавливалось равновесие вращающего и тормозного момента на валу. С увеличением нагрузки навалу двигателя соответственно должен увеличиваться и вращающий момент. Это увеличение происходит так: при увеличении нагрузки на валу тормозной момент оказывается больше вращающего, уменьшается частота вращения ротора п, а скольжение увеличивается.


Увеличение скольжения ведет к увеличению вращающего момента, и наступает равновесие моментов при увеличении скольжения.
Зависимость момента от скольжения довольна сложна. В выражении  все величины (I2; Ф;cosφ2) зависят от скольжения. Ток ротора I2 с увеличением скольжения возрастает, что видно из формулы
все величины (I2; Ф;cosφ2) зависят от скольжения. Ток ротора I2 с увеличением скольжения возрастает, что видно из формулы  . Причем, при
. Причем, при  сила тока ротора
сила тока ротора
возрастает быстро, а при  - значительно медленней.
- значительно медленней.
-магнитный поток Ф пропорционален э.д.с. статора  , а
, а  при увеличении скольжения ток статора увеличивается, э.д.с. E1, уменьшается, значит магнитный поток Ф уменьшается.
при увеличении скольжения ток статора увеличивается, э.д.с. E1, уменьшается, значит магнитный поток Ф уменьшается.
-коэффициент мощности цепи ротора при увеличении скольжения уменьшается.

Значит при возрастании скольжения магнитный поток и ток ротора увеличивается, а коэффициент мощности уменьшается. Выражение момента через параметры асинхронного двигателя:
 Для определения условий максимального момента возьмем производную
Для определения условий максимального момента возьмем производную 
Решив это уравнение определим критическое скольжение, при котором момент максимален  .
.
Из полученного выражения видно, что sKP зависит от сопротивления фазы обмотки ротора. Чем больше активное сопротивление  ротора, тем ниже его скорость
ротора, тем ниже его скорость 
Мmax - соответствует обычно небольшим значениям скольжения, так как индуктивное сопротивление обмоток намного больше чем их активные сопротивления,  . При изменении скольжения от нуля до sKP работа двигателя является устойчивой, так как с увеличением тормозного момента на валу, скорость вращения ротора на валу уменьшается, скольжение увеличивается, увеличивается и вращающийся момент. Восстанавливается динамическое равновесие между тормозным и вращающим моментом (участок 1 и 2).
. При изменении скольжения от нуля до sKP работа двигателя является устойчивой, так как с увеличением тормозного момента на валу, скорость вращения ротора на валу уменьшается, скольжение увеличивается, увеличивается и вращающийся момент. Восстанавливается динамическое равновесие между тормозным и вращающим моментом (участок 1 и 2).

