




Ответ:
Правильный выбор мощности и количества ГА судовой электростанции позволяет обеспечить бесперебойное и экономичное снабжение приемников электроэнергией заданного качества. Нагрузка СЭС, создаваемая приемниками, не является постоянной, а зависит, в основном, от режима работы судна. Поскольку работу СЭО в каждом режиме работы судна обеспечивает СЭЭС, названия режимов работы судна и работы СЭЭС одина
ковы.
Для морских и речных судов Правилами Регистра Украины установлены следующие режимы работы судна, а значит, и СЭЭС:
1. ходовой;
2. маневров;
3. аварийный - во время пожара, пробоины корпуса или других влияющих на безопасность плавания судна условий при работе основных источников электроэнергии;
4. другие режимы в соответствии с назначением судна.
Такими режимами являются:
1. для транспортных судов - стоянка без грузовых операций и стоянка с грузовыми операциями;
2. пассажирских судов - стоянка без пассажиров и стоянка с пассажирами;
3. судов технического флота - стоянка без работы технологического оборудования и стоянка с его работой;
4. ледоколов - стоянка и ход во льдах;
5. буксиров - стоянка и ход с буксировкой.
Режим работы судна определяет основные группы включенных в любой момент времени приемников электроэнергии.
В ходовом режиме включены приемники, обеспечивающие работу СЭУ, средств навигации и связи, а также создающие нормальные бытовые условия экипажа.
В режиме маневров, возникающих при проходе узкостей, входе в порт и выходе из него, перешвартовке и т. д., работают все приемники ходового режима и дополнительно могут быть включены ЭП брашпиля, шпиля и компрессора пускового воздуха ГД. Однако при комплектации СЭС этот режим обычно не учитывают вследствие его непродолжительности, а также из-за того, что на маневрах для обеспечения максимальной безопасности плавания всегда включают резервный ГА.
В режиме стоянки без грузовых операций включены приемники, удовлетворяющие нужды экипажа, обеспечивающие работу приводных двигателей ГА, механизмов вспомогательного котла и др.
В режиме стоянки с грузовыми операциями дополнительно включа-
ются грузовые лебедки или (и) краны.
В аварийном режиме с работой основных источников электроэнергии нагрузка СЭС увеличивается, так как к приемникам электроэнергии, обеспечивающим ходовой режим, добавляются новые. Например, тушение пожара нередко связано с поступлением больших объемов воды внутрь отсеков и судовых помещений, поэтому одновременно с пожарными насосами могут быть включены также балластные и осушительные. При этом нагрузку СЭС можно частично уменьшить путем отключения малоответственных приемников. В случае необходимости включают резервный генератор.
В аварийном режиме с работой аварийного источника электроэнергии от АРЩ, в течение 18 часов получают питание особо ответственные приемники, обеспечивающие безопасность экипажа в случае аварии, вызвавшей прекращение работы основных источников электроэнергии: аварийное освещение, средства навигации и связи; пожарный насос; сигнально-отличитель-ные фонари сигнала «Не могу управляться», системы сигнализации обнаружения пожара и др.
Вопрос 4. Рассчитайте нагрузки каждого из двух параллельно труд-щих генераторов, если их номинальные мощности в соответствии Р1 = 900 кВт и Р2 = 420 кВт, а суммарная нагрузка судовой электростанции Р S = 1188 кВт
Ответ:
Общая нагрузка судовой электростанции обозначается символом -  (дано в условии задачи). Сумма номинальных мощностей генераторов определяется по формуле:
(дано в условии задачи). Сумма номинальных мощностей генераторов определяется по формуле:
 = Р
= Р  + Р
+ Р  = 900 + 420 = 1320 кВт
= 900 + 420 = 1320 кВт
где Р - номинальная мощность одного генератора, кВт;
Р - номинальная мощность другого генератора, кВт;
Р Н n - номинальная мощность n-ного генератора, кВт.
Коэффициент загрузки судовой электростанции определяется по формуле:
к  = /
= /  = 1188/1320 = 0,9
= 1188/1320 = 0,9
Нагрузка n-ного генератора определяется по формуле:
Рг n = к * Р Н n = 0,9 * 900 = 810
Рг n = к * Р Н n = 0,9 * 420 = 378
Р  = Рг 1 + Рг 2 = 810 + 378 = 1188 кВт
= Рг 1 + Рг 2 = 810 + 378 = 1188 кВт
Вопрос 5. С помощью внешних характеристик синхронных генераторов объясните, как распределяется реактивную нагрузку синхронных генераторов при их параллельной работе с одновременным сохранением напряжения каждого из генераторов
Ответ:
Распределение активной нагрузки между параллельно работающими синхронными генераторами определяется видом механических характеристик их приводов, снабженных регуляторами частоты. Видом внешних характеристик по реактивному току синхронных генераторов с регуляторами напряжения определяется распределение их реактивных токов, внешними характеристиками генераторов постоянного тока — распределение их токов нагрузки.
Наиболее распространенными методами распределения, нагрузок в морских системах электроснабжения являются, методы статических и мнимостатических характеристик. Метод статических характеристик. Распределение нагрузки по методу статических характеристик возможно при совместной работе генератора постоянного тока или трансформаторно-выпрямительного блока с аккумуляторными батареями. В случае обрыва уравнительных цепей, обеспечивающих распределение нагрузки по методу мнимого статизма генераторов постоянного тока, метод мнимого статизма вырождается в метод статических характеристик.
Метод мнимостатических характеристик. При распределении нагрузки по методу мнимостатических характеристик в конструкции регуляторов предусматриваются уравнительные цепи, позволяющие воздействовать на их исполнительные органы сигналами, пропорциональными отклонению нагрузки, приходящейся на один генератор, от ее среднего значения.
При эксплуатации возможны следующие случаи параллельной работы генератора: с другими генераторами, имеющими принципиально отличную систему возбуждения (например машинную или статическую); с другими такими же генераторами или генераторами, имеющими аналогичную по принципу действия и схеме систему возбуждения; с промышленной сетью.
В первом случае для пропорционального распределения реактивной мощности между генераторами необходимо, чтобы напряжение каждого из генераторов при автономной работе несколько уменьшалось с увеличением реактивной нагрузки, а статизм по реактивной мощности генераторов был одинаков.
Статизмом по реактивной мощности называют относительное изменение напряжения генератора при увеличении его реактивной мощности. При неодинаковом статизме по реактивной мощности и одинаковом напряжении параллельно работающих генераторов распределение реактивной мощности между ними будет происходить непропорционально их номинальным мощностям (рис. 5.1).
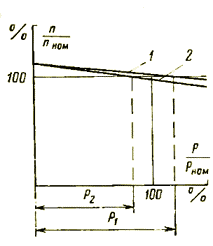
Рис. 5.1. Распределение реактивной мощности между параллельно работающими генераторами 1 к 2, имеющими неодинаковый статизм по реактивной мощности. U — напряжение генератора; Q — реактивная мощность генератора.
Для удовлетворительной параллельной работы генераторы должны иметь статизм по реактивной мощности 3—4%. Системы возбуждения многих генераторов не обеспечивают необходимого статизма по реактивной мощности и поэтому имеют специальное устройство параллельной работы, работа которого рассмотрена ниже.
Во втором случае пропорциональное распределение реактивных мощностей между параллельно работающими генераторами может быть достигнуто двумя путями: обеспечением одинакового их статизма по реактивной мощности, т. е. аналогично случаю параллельной работы разнотипных генераторов, или с помощью уравнительной связи обмоток возбуждения, что обеспечит самобаланс системы по реактивной мощности.
При параллельной работе со статизмом по реактивной мощности в результате увеличения реактивной нагрузки от 0 до 100% номинальной уменьшение напряжения на зажимах параллельно работающих генераторов достигает 4% начального значения, что не всегда приемлемо.
При параллельной работе с уравнительными соединениями без статизма по реактивной мощности точность поддержания напряжения на зажимах параллельно работающих генераторов будет такой же, как и при их автономной работе.
Для обеспечения удовлетворительной параллельной работы генераторы тоже должны иметь устройства параллельной работы.
Если генератор, работающий параллельно с сетью, необходимо нагрузить реактивной мощностью, то нужно увеличить его ток возбуждения. Изменение тока возбуждения генератора, работающего параллельно с сетью, достигается изменением сопротивления уставки напряжения. Устойчивая параллельная работа генератора с сетью возможна лишь при наличии статизма по реактивной мощности.
Статическая система возбуждения обеспечивает увеличение тока возбуждения генератора с ростом его нагрузки. При параллельной работе напряжения генератора и сети равны, поэтому при отсутствии статизма по реактивной мощности с увеличением последней будет увеличиваться ток возбуждения генератора. Увеличение тока возбуждения генератора, работающего параллельно с сетью, приведет в свою очередь к дальнейшему росту его активной мощности. Этот процесс будет продолжаться до тех пор, пока генератор не выйдет из строя вследствие недопустимой перегрузки.
При наличии статизма большей реактивной мощности соответствует меньшее напряжение генератора, но напряжение определено сетью и снизить его нельзя, поэтому увеличение реактивной мощности генератора при неизменном напряжении сети невозможно.
Вопрос 6. Рассчитайте напряжение и зарядный ток кислотного 6СТЭ-128 и щелочного 10кН-22М аккумуляторов. Какова продолжительность и признаки окончания заряда кислотных аккумуляторов? Щелочных аккумуляторов?
Ответ:
Кислотные и щелочные АБ применяют на судах для питания электроэнергией сетей управления автоматических устройств, аварийного освещения, авральной и пожарной сигнализации, радио- и телефонной связи, отличительных огней, для пуска дизелей с помощью электростартеров.
Кислотные аккумуляторы:
Е = 0,84 + d = 0,84 + 1,4 = 2,24 В
где d = 1,4 г/см3 – плотность электролита
Напряжение аккумулятора в режиме заряда
Uз = 0,84 + d + Iз * Rвн
где Rвн – внутреннее сопротивоение аккумулятора, Rвн = 0,005 Ом
С = I * nt = 400 * 6 * 0,0014 = 3,36Ач, где I – стартерный ток
Iз = С/10 = 3,36/10 = 0,336 А
Uз = 0,84 + 1,4 + 0,336 * 0,005 = 2,24 В
Щелочные аккумуляторы:
Е = 0,84 + d = 0,84 + 1,21 = 2,05 В
где d = 1,21 г/см3
Uз = 0,84 + d + Iз * Rвн
где Rвн – внутреннее сопротивоение аккумулятора, Rвн = 0,005 Ом
Iз = (U3 – 0,84 – d)/Rвн = ((1,8 – 0,84 – 1,21)/0,05 = 5А
Uз = 1,8 В – напряжение заряда
Uр = 0,8 В – напряжение разряда
U = 1,2 В – рабочее напряжение
Признаками окончания зарядки кислотной батареи являются: неизменяющееся в течение последних 2 ч зарядки напряжение, равное 2,55—2,6 в на каждом элементе, и плотность электролита, равная 1,28± ±0,005 г/см3, сильное газовыделение (электролит «кипит»). Если установившаяся плотность электролита в конце зарядки отличается от этой величины, то производят исправление ее добавлением кислоты удельным весом 1,4 или добавлением дистиллированной воды, не прерывая зарядки. Для лучшего перемешивания электролита после исправления плотности зарядку продолжают около 30 мин. По окончании зарядки батареи с целью уменьшения ее саморазряда поверхность батареи вытирают насухо влажной тряпкой до полного удаления следов кислоты, а штыри и гайки смазывают техническим вазелином. Пробки заворачиваются после окончания выделения газа, но не раньше чем через 2 ч после окончания зарядки.
Измерения сопротивления изоляции щелочной батареи производится после первой зарядки и в процессе эксплуатации после каждой десятой зарядки.
По окончании зарядки батарея отключается от источника питания и охлаждается в течение 2—3 ч, протираются влажной тряпкои насухо крышки, перемычки, контактные болты и крышки горловин, после этого крышки закрываются и проверяется сопротивление между выводными полюсами батареи и батарейным ящиком с помощью вольтметра. При эксплуатации аккумуляторных батарей категорически запрещается производить совместную зарядку щелочных и кислотных аккумуляторных батарей и пользоваться для приготовления электролита общей посудой и помещением, а также общим ареометром.
Вопрос 7. Приведите определение таких терминов: «механическая характеристика электрического двигателя», «механическая характеристика исполнительного механизма». В каких системах координат строятся эти характеристики? В чем их физический смысл?
Ответ:
Механической характеристикой электродвигателя называется зависимость его угловой скорости от вращающего момента ωд = f(M).Здесь следует иметь ввиду, что момент М на валу двигателя независимо от направления вращения имеет положительный знак - момент движущий. Вместе с тем момент сопротивления Мс имеет знак отрицательный.

Рис. 7.1. Механические характеристики электродвигателей
Для оценки свойств механических характеристик электропривода используют понятие жесткости характеристики. Жесткость механической характеристики определяется по выражению
β = dМ /dω
где dМ – изменение момента двигателя; dωд – соответствующее изменение угловой скорости.
Для линейных характеристик значение β остается постоянным, для нелинейных – зависит от рабочей точки.
Используя это понятие, характеристики, приведенные на рис. 7.1, можно качественно оценить так: 1 – абсолютно жесткая (β =∞); 2 – жесткая; 3 – мягкая.
Механической характеристикой механизма называют зависимость между угловой скоростью и моментом сопротивления механизма, приведенными к валу двигателя) ω = f(Mс).
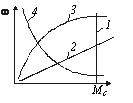
Рис. 7.2. Механические характеристики механизмов
Среди всего многообразия выделяют несколько характерных типов механических характеристик механизмов:
1. Характеристика с моментом сопротивления, не зависящим от скорости (прямая 1 на рис. 7.2). Независимая от скорости механическая характеристика графически изображается прямой, параллельной оси вращения, в данном случае вертикалью. Такой характеристикой обладают, например, подъемные краны, лебедки, поршневые насосы при неизменной высоте подачи и др.
2. Характеристика с моментом сопротивления линейно зависящим от скорости (прямая 2 на рис. 7.2). Такая зависимость присуща, например, приводу генератора постоянного тока с независимым возбуждением, работающему на постоянную нагрузку.
3. Характеристика с нелинейным возрастанием момента (кривая 3 на рис. 7.2). Типичными примерами емогут служить характеристики вентиляторов, центробежных насосов, гребных винтов. Для этих механизмов момент Мс зависит от квадрата угловой скорости ω. Это т.н. параболичская (вентиляторная) механическая характеристика.
4. Характеристика с нелинейно спадающим моментом сопротивления (кривая 4 на рис. 7.2). Здесь момент сопротивления обратно пропорционален скорости вращения. Мощность в этом случае остается постоянной на всем диапазоне рабочей скорости механизма. Например, у механизмов главного движения некоторых металлорежущих станков (токарных, фрезерных, расточных) момент Мс изменяется обратно пропорционально ω, а мощность потребляемая механизмом, остается постоянной.
Вопрос 8. Приведите рисунок 4-плунжерной рулевой машины и объясните ее действие
Ответ:
Силовой привод рулевой машины (рис. 8.1) состоит из четырех гидроцилиндров I — IV, в которых под действием давления масла (рраб = 12 МПа) перемещаются плунжеры, воздействующие на баллер 18 через продольно-румпельный привод. Масло к гидроцилиндрам поступает от главных насосов 7 радиально-поршневого типа с регулируемой подачей через клапанный блок 22, с помощью которого можно настроить ЭГРМ на работу одним или двумя насосами 7 на четыре или два гидроцилиндра. Клапаны HI, НЗ являются разобщительными для насоса ГН1; клапаны Н2, Н4 - для насоса ГН2. Через клапаны Ц1, Ц2, ЦЗ, Ц4 гидроцилиндры I, II, III, IV сообщаются с нагнетательными и всасывающими полостями насосов 7. Клапаны Ш, П2, ПЗ, П4 служат для непосредственного перепуска масла между выключенными из работы гидроцилиндрами. Клапаны Р1 и Р2 разобщают гидроцилиндры от аварийного привода. При настройке рулевой машины на нужный режим работы должны быть открыты запорные клапаны работающих насосов и гидроцилиндров, а также перепускные клапаны неработающих гидроцилиндров. Остальные клапаны должны быть закрыты.
Управление рулевой машины осуществляется системой управления следящего типа с рычажной обратной связью. При повороте штурвала на посту управления на угол, соответствующий заданному углу перекладки руля, управляющий сигнал поступит к исполнительному электродвигателю 15, вращение которого через редуктор 16 передается на выходной валик 13 с винтовой нарезкой. Вращательное движение валика 13 преобразуется в линейное перемещение ходовой гайки 14 из точки А в точку А'. Конец дифференциального рычага 11, связанный с гайкой 14, повернется относительно неподвижной точки С на баллере,и рычаг 11 займет положение А'В'С. Тяга 9 управления насосами 7, связанная с дифференциальным рычагом, сместит через гидроусилители 8 (или буферные пружины при небольшом управляющем усилии) направляющие кольца насосов вправо и включит подачу в направлении трубопроводов в, е. Через клапаны НЗ и Н2 масло поступит к клапанам Ц2 и ЦЗ и гидроцилиндрам // и ///, перемещение плунжеров которых вызовет поворот баллера 18 против часовой стрелки. Масло, вытесняемое при этом из цилиндров / и IV, поступает через клапаны Ц1, Ц4, HI, H4 во всасывающие трубопроводы г, д насосов 7.
Поворот баллера приведет к перемещению дифференциального рычага 11 из точки С в точку С, и рычаг займет положение А'ВС. Тяга 9 займет положение, соответствующее нулевой подаче насосов 7. Баллер 18 остановится, и руль установится в заданное положение. Для возвращения руля в диаметральную плоскость штурвал переводят в исходное положение. Исполнительный электродвигатель 15, вращаясь в противоположную сторону, вернет рычаг 11 в точку А, и он займет положение АВ"С'. Тяга 9 сдвинется влево и изменит направление подачи насосов 7 по сравнению с первоначальным. Теперь нагнетание масла будет происходить через трубопроводы гид. Масло поступит через клапаны HI, Н4, Ц1, Ц4 в цилиндры / и IV. При перемещении плунжеров масло из цилиндров II и III через клапаны Ц2, ЦЗ, Н2 и НЗ будет отводиться во всасывающие трубопроводы в и е. Баллер 18 начнет поворачиваться по часовой стрелке до тех пор, пока дифференциальный рычаг 11 не займет положение ABC, при котором тяга 13 возвратит направляющие кольца насосов 7 в положение "нулевая подача".
Положение руля контролируют по аксиометру, установленному в рулевой рубке. Сельсин-приемник аксиометра электрически связан с сельсином-датчиком 19, воспринимающим поворот баллера 18 через систему рычагов. По шкале 20 баллера относительно неподвижной стрелки фиксируется фактический угол перекладки руля.
Сельсин 12 является датчиком обратной связи электрической системы управления.
При появлении неисправностей в системе дистанционного управления переходят на местное управление из румпельного отделения с помощью маховика 17.

Рис. 8.1. Гидросистема плунжерной рулевой машины

