




ћонастырский Ћ.ћ.
ќ—Ќќ¬џ ћ≈’јЌ» » ƒЋя —“”ƒ≈Ќ“ќ¬†
–ј—Ў»–≈ЌЌќ√ќ Ќјѕ–ј¬Ћ≈Ќ»я Ђ‘»«» јї
”чебное пособие
ƒл€ студентов физических специальностей университетов
√.–остов- на Ц ƒону
2007
¬ насто€щее врем€ издано огромное количество учебников по курсу Ђќбща€ физикаї дл€ студентов высших учебных заведений, обучающихс€ по специальност€м Ђестественнонаучное образованиеї и Ђфизико-математическое образованиеї. ќднако при чтении лекций пользоватьс€ только каким-либо одним из них не представл€етс€ возможным ни дл€ преподавател€, ни дл€ студента. Ѕолее того, роль лектора не сводитс€ к пересказыванию содержани€ учебника, даже самого удачного, целиком. ¬сегда необходимо отбирать материал, соответствующий рабочей программе данной специальности и пристрасти€м лектора.
†† ¬ данном конспекте лекций по разделу курса общей физики Ђћеханикаї сделана попытка изложить соответствующий материал логически замкнуто и методически обосновано. ќсобое внимание при этом удел€етс€ пон€ти€м модели в физике, способам выбора модели и их теоретическому описанию. ћного внимани€ модел€м удел€етс€ при введении пон€ти€ взаимодействи€ и обоснованию необходимости раздельного по€влени€ силы трени€ поко€ и силы трени€ скольжени€.
“щательно рассматриваютс€ границы применимости тех или иных физических законов, а также рел€тивистское и нерел€тивистское приближение в механике.
†† ¬ основу физики как учебного предмета положена физика как наука, что позвол€ет опиратьс€ на основные законы механики и показывать, как они работают в разных услови€х.
ƒостаточно много внимани€ удел€етс€ графическим иллюстраци€м к теоретическому материалу, которые €вл€етс€ неотъемлемой частью лекции. Ёто позвол€ет включать пространственное воображение слушател€ и делает более нагл€дными сложные математические выкладки.
—ледует заметить, что поскольку физика наука, возникша€ из эксперимента, лекции следует сопровождать показом демонстраций, логически св€занных с теоретическим материалом. ¬ конспекте лекций приведены ссылки на возможные варианты демонстрационного эксперимента, что очень удобно дл€ лектора. роме того, приведены примеры некоторых задач, которые также можно приводить дл€ демонстрации возможных применений тех или иных физических законов.
ќ—Ќќ¬џ Ћј——»„≈— ќ… ћ≈’јЌ» »
1. инематика материальной точки
‘изика Ц наука об окружающем нас мире. ‘изика Ц наука опытна€. ≈е цель и задачи состо€т в том, чтобы пон€ть всю природу, как разные про€влени€ одной совокупности физических €влений и происход€щих в ней процессов. ќткрыть законы, сто€щие за этими процессами и объединить отдельные €влени€ природы, предварительно разъединив их дл€ подробного изучени€.
‘изика, как наука, возникла благодар€, прежде всего, трудам греческого философа јристотел€ (384 Ц 322 г.г. до н.э.). јристотель собрал и систематизировал огромный естественнонаучный материал предшественников (как говор€т, он владел всеми знани€ми той эпохи) и сам осуществил р€д глубоких наблюдений. Ќесмотр€ на то, что в его взгл€дах на строение окружающего нас мира было много заблуждений, они просуществовали около 16 веков, т.к. во многом совпадали с догматами церкви. —ледующий шаг в развитии физики и, прежде всего механики, сделали италь€нский ученый √алилео √алилей (1564 Ц 1642 г.г.) и англичанин »саак Ќьютон (1643 Ц 1727 г.г.). »менно они заложили основы так называемой классической механики, которую мы будем изучать в течение всего первого семестра.
|
|
|
1. ƒвижение в пространстве. —пособы задани€ положени€ тел в пространстве (векторный способ, координатный способ, Ђестественныйї способ).
ћеханика Ц раздел физики, в котором изучаетс€ механическое движение, т.е. изменение положени€ тел в пространстве относительно других с течением времени. ћеханика, в свою очередь, чисто формально, раздел€етс€ на кинематику и динамику. ¬ кинематике изучаетс€ механическое движение без вы€снени€ причины того или иного характера движени€ (состо€ние поко€, равномерного пр€молинейного движени€ или движение с ускорением).
† ак ни странно, механика не может точно описать ни один реальный физический процесс, происход€щий в окружающем нас мире. ƒело в том, в ходе каждого реального процесса происходит множество тесно св€занных друг с другом €влений, которые не поддаютс€ математическому описанию (составлению формул). ¬ыход состоит в том, чтобы пользоватьс€ модел€ми, поддающимис€ математическому описанию. ќт модели совсем не требуют внешнего сходства с описываемым объектом, достаточно, чтобы совпадали их свойства. “акой моделью в механике €вл€етс€ материальна€ точка.
ћатериальна€ точка это тело, размерами которого можно пренебречь в услови€х данной задачи. Ќапример, в одних задачах «емлю можно считать материальной точкой, а в других Ц нельз€.
ќсновными физическими пон€ти€ми раздела Ђ инематика материальной точкиї €вл€ютс€: механическое движение, траектори€, система отсчета, путь и перемещение, средн€€ и мгновенна€ скорость, равномерное пр€молинейное движение, ускорение.
† ћеханическое движение Ц изменение положени€ тел в пространстве относительно других тел. –ассмотрим дл€ начала способы задани€ положени€ тел в пространстве (идет речь о материальных точках).
ќбратимс€ к рис.1(а,б).
 | |||
 | |||
††††††††††††††††††††††† а)††††††††††††††††††††††††††††††††††††††† ††††††††††б)
††††††††††††††††††††††††††††††††††††††††††††††††† –ис.1
†Ќа рис.1 (а) показаны декартовы координаты х, у точки ј на плоскости. «десь же приведен радиус-вектор этой точки ј. ¬идно, что координаты радиус-вектора точки ј совпадают с ее декартовыми координатами. Ќа рис. 1 (б) приведены проекции на оси координат произвольного вектора  †(проведенного не из начала координат).
†(проведенного не из начала координат).
† Ћюбой вектор †удобно представл€ть с помощью единичного вектора некоторого произвольного направлени€. Ќа рис.2 представлено некоторое произвольное направление и указан единичный вектор этого направлени€  .
.
††††††††††††††††††††††††††††††††††††††††††††††††††††††††††††††††††

††††††††††††††††††††††††††††††††††††††††††††††††††††††††††† –ис.2
“огда любой вектор †этого направлени€ можем записать в следующем виде:
††††††††††††††††††††††††††††††††††††††††††††††††††††††  ††.†††††††††††††††††
††.†††††††††††††††††
–адиус Ц вектор удобно разлагать по ос€м координат с помощью единичных векторов- ортов. –ассмотрим рис.3.
|
|
|
 ††††
††††
††††††
††††††††††††††††††††††††††††††††††††††††††††††††††††††††††††††††† –ис.3
«десь  †- единичные векторы (орты) декартовой системы координат в пространстве. “огда разложение радиус-вектора
†- единичные векторы (орты) декартовой системы координат в пространстве. “огда разложение радиус-вектора  ††по ортам выгл€дит следующим образом:
††по ортам выгл€дит следующим образом:
†††††††††††††††††††††††††††††††††††††††††††††††††  †.
†.
–ассмотрим теперь способы задани€ положени€ точки в пространстве.
1. ¬екторный способ.††††††††††††††††††††††††††††††††††††††††††††††††††††††††
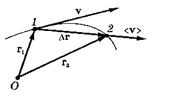
¬ этом способе следует задать начало отсчета Ц точку ќ. “огда положение некоторой точки ј относительно этого начала отсчета можно задать с помощью радиус-вектора, как показано на рис.4. “аким образом, задаетс€ зависимость  .
.
 |
†††††††††††††††††††††††††††††††††††††††††††††† –ис.4
√еометрическое место точек концов радиус-вектора называетс€ траекторией. ¬ведем вектор перемещени€, как  . Ќазовем средней скоростью движени€ величину:
. Ќазовем средней скоростью движени€ величину:
†††††††††††††††††††††††††††††††††††††††††††††††††††††  .
.
¬идно, что направление средней скорости совпадает с направлением вектора перемещени€.
≈сли уменьшать интервал времени  , то в пределе получим мгновенную скорость следующим образом:
, то в пределе получим мгновенную скорость следующим образом:
†††††††††††††††††††††††††††††††††††††††††††††† †††††  †.††††††††
†.††††††††
ћгновенна€ скорость представл€ет собой производную по времени от радиус-вектора.
«амечание.
ќтметим, что в общем случае  . Ќапример, в случае движени€ точки по окружности с посто€нной по модулю скоростью
. Ќапример, в случае движени€ точки по окружности с посто€нной по модулю скоростью  €сно, что,
€сно, что,  и, следовательно, d
и, следовательно, d  †0. — другой стороны,
†0. — другой стороны,  , т.к. вектор все врем€ измен€ет свое направление.
, т.к. вектор все врем€ измен€ет свое направление.
ѕри изменении скорости возникает ускорение, которое можно определить следующим образом:  , или с помощью разложени€ по ортам декартовой системы координат:
, или с помощью разложени€ по ортам декартовой системы координат:
†††††††††††††††††††††††††††††††††††††††††††††††††††††  †.
†.
† “аким образом, зна€ зависимость  , можно вычислить скорость и ускорение тела в любой момент времени.
, можно вычислить скорость и ускорение тела в любой момент времени.
—уществует и обратна€ задача Ц зна€ ускорение в виде зависимости  , найти скорость и перемещение тела. ƒл€ решени€ этой задачи воспользуемс€ интегральным исчислением. ѕо определению †и правую часть этого выражени€ можно рассматривать, как производную скорости по времени, с другой стороны, ее можно рассматривать как отношение двух бесконечно малых величин Ц дифференциала (бесконечно малого приращени€) скорости dV и дифференциала (бесконечно малого приращени€) времени dt. “огда следует очевидное:
, найти скорость и перемещение тела. ƒл€ решени€ этой задачи воспользуемс€ интегральным исчислением. ѕо определению †и правую часть этого выражени€ можно рассматривать, как производную скорости по времени, с другой стороны, ее можно рассматривать как отношение двух бесконечно малых величин Ц дифференциала (бесконечно малого приращени€) скорости dV и дифференциала (бесконечно малого приращени€) времени dt. “огда следует очевидное:
†††††††††††††††††††††††††††††††††††††††††††  .
.
ќтсюда можно записать при V0 =0:
†††††††††††††††††††††††††††††††††††††††††††††  .
.
Ќайдем теперь перемещение тела, использу€ определение мгновенной скорости:
††††††††††††††††††††††††††††††††††††††††††††††  .
.
“огда можем записать  , или окончательно
, или окончательно  .
.
† ѕоскольку дл€ модул€ мгновенной скорости можем записать  , где S Ц путь, пройденный телом вдоль траектории, то величину этого пути можно найти с помощью следующего выражени€:
, где S Ц путь, пройденный телом вдоль траектории, то величину этого пути можно найти с помощью следующего выражени€:
††††††††††††††††††††††††††††††††††††††††††††††††††††††††††  .
.
2. оординатный способ.
 «адавим начало отсчета точку ќ, и св€жем с ней декартову систему координат в пространстве (рис. 5).
«адавим начало отсчета точку ќ, и св€жем с ней декартову систему координат в пространстве (рис. 5).
††††† ††††††††††††††††††††††††††††††††††††††††††††††††–ис. 5
“огда, зна€ зависимости координат частицы от времени, можно рассчитать ее скорость и ускорение в любой другой момент времени следующим образом:
 и
и 
 膆
膆  .
.
“акже это дает возможность рассчитать направление векторов скорости и ускорени€ по формулам:
†††††††††††††††††††  ,†
,†  †,†
†,†  .
.
3. Ђ≈стественныйї способ.
 Ёто способ задани€ положени€ точки в пространстве с помощью параметров траектории. –ассмотрим рис.6.
Ёто способ задани€ положени€ точки в пространстве с помощью параметров траектории. –ассмотрим рис.6.
††††††††††††††††††††††††††††††††††††††††††††††††††††††††††††† –ис. 6
“очка ќ задает начало отсчета дл€ движени€ вдоль траектории точки ј. »змер€€ длину траектории l от начала ќ до положени€ точки в данный момент времени, можно задавать положение точки в любой момент времени.
|
|
|
¬ведем единичный вектор касательной к траектории в данной точке  . ѕри движении вдоль траектории произвольной формы мен€етс€ направление этого вектора , следовательно, он измен€етс€ во времени.
. ѕри движении вдоль траектории произвольной формы мен€етс€ направление этого вектора , следовательно, он измен€етс€ во времени.
ѕоскольку, по определению, мгновенна€ скорость €вл€етс€ производной перемещени€ по времени, а вектор перемещени€ совпадает с хордой, соедин€ющей два последовательных положени€ тела ј и ¬, то направление вектора скорости в данной точке совпадает с предельным положение хорды, т.е. с касательной (см. рис. 7).
 |
††††††††††† †††††††††††††††††††††††††††††††††††††††††††††††††††††–ис. 7††††
ћожем теперь написать  . «десь V- модуль вектора скорости. Ѕолее точной €вл€етс€ запись
. «десь V- модуль вектора скорости. Ѕолее точной €вл€етс€ запись  .
.
Ќайдем мгновенное ускорение точки по формуле:
††††††††††††††††††††††††††††††††††††††††††  .
.
„исто формально (с точки зрени€ математики) ускорение разделилось на две составл€ющие его части. ѕопытаемс€ найти физический смысл каждой составл€ющей. ѕервое слагаемое  †назовем тангенциальным, поскольку его направление совпадает с направлением касательной к траектории движени€ точки. ¬ы€сним более подробно смысл величины
†назовем тангенциальным, поскольку его направление совпадает с направлением касательной к траектории движени€ точки. ¬ы€сним более подробно смысл величины  , €вл€ющейс€ производной единичного вектора касательной по времени.
, €вл€ющейс€ производной единичного вектора касательной по времени.
ѕроизводна€ единичного вектора по времени.
ѕо определению производной  . — другой стороны,
. — другой стороны,  , вектор
, вектор
 †представл€ет собой направление вектора
†представл€ет собой направление вектора  . “еоретически доказываетс€, вектор
. “еоретически доказываетс€, вектор
†направлен перпендикул€рно касательной к траектории в данной точке, а  †(угол поворота вектора ). —ледовательно, можем написать:
†(угол поворота вектора ). —ледовательно, можем написать:
††††††††††††††††††††††††  .
.
ѕо определению при вращательном движении по окружности углова€ скорость  , следовательно:
, следовательно:
††††††††††††††††††††††††††††††††††††††  .
.
†† ѕоскольку существует св€зь модул€ угловой и линейной скорости ( ), то можем записать:
), то можем записать:
††††††††††††††††††††††††††††††††††††††††††††††††††††††  .
.
††† “еперь дл€ полного ускорени€ можем записать следующую формулу:
†††††††††††††††††††††††††††††††††††† ††††††††††††  .
.
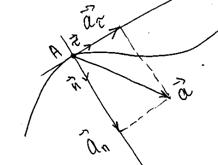
«десь †- тангенциальное ускорение, направленное по касательной к траектории в данной точке. ќно определ€ет изменение модул€ скорости.
ƒруга€ составл€юща€ полного ускорени€  , где
, где  †- единичный вектор нормали к касательной в данной точке траектории (см. рис. 8).
†- единичный вектор нормали к касательной в данной точке траектории (см. рис. 8).
 |
†††††††††††††††††††††††††††††††††††††††††††††††††††††††††††† –ис. 8
ѕолное ускорение теперь записываетс€ в виде:
†††† †††††††††††††††††††††††††††  =
=  †+
†+  .
.
†††††

