




Цель работы
Целью работы является исследование системы автоматического регулирования (САР) температуры обогреваемого вытяжного цилиндра. В процессе работы выполняется оценка влияния настроек регулятора на динамику процесса автоматического регулирования.
Указания к выполнению работы
Обогреваемые вытяжные цилиндры широко применяются в машинах химических волокон для реализации процесса термовытягивания (вытягивание с одновременным нагревом) синтетических нитей, существенно повышающего их прочностные свойства.
В первом довольно грубом приближении регулируемый объект с датчиком может рассматриваться как апериодическое звено второго порядка с передаточной функцией:

где К0 – коэффициент передачи объекта;
Т0 – постоянная времени объекта.
Тд – постоянная времени датчика.
Фактически объект более сложен, характеризуется распределенностью параметров, проявляющейся, в частности, неравномерностью температурного поля вдоль цилиндра, которая также представляет интерес с точки зрения технологов. Приведенное выше приближенное описание характеризует свойства объекта в зоне установки датчика температуры.
Функциональная схема САР приведена на рис. 2. На схеме q – текущее значение температуры объекта, q1 – соответствующий сигнал датчика,
qз – заданное значение температуры, Х – сигнал рассогласования (Х = qз – q1), У – регулирующее воздействие, f – возмущение.
В качестве объекта выступает цилиндр, используется цифровой датчик температуры, в роли регулятора выступает микроконтроллер.
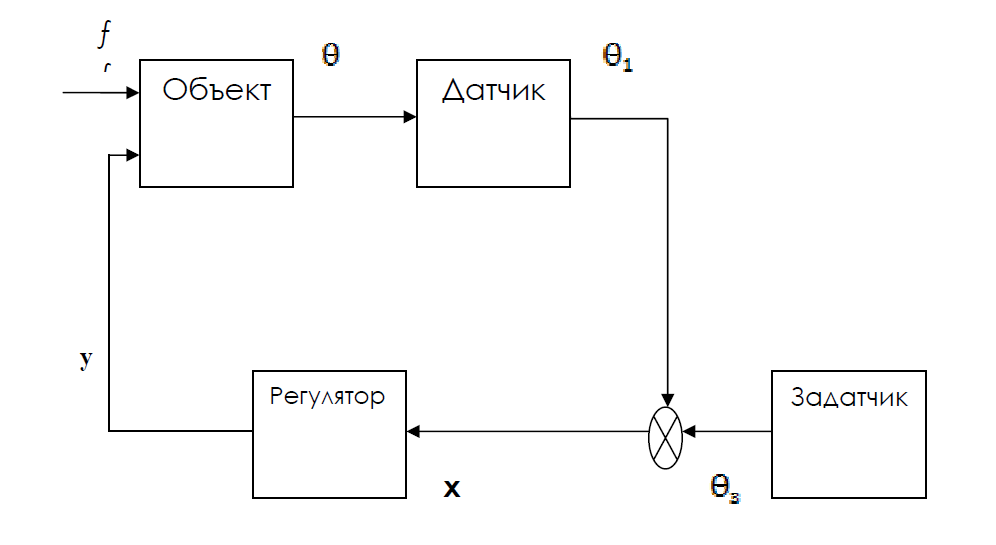
Рис.2. Функциональная схема САР
Описание лабораторного стенда
Лабораторный стенд (Рис. 3) включает двигатель, регулятор и цилиндр с индукционным обогревом. На рабочей поверхности цилиндра должна поддерживаться заданная температура. Двигатель питается от трансформатора с тумблером на два положения, который меняет скорость вращения цилиндра, что является возмущением для системы регулирования температуры. Еще одно возмущение формируется вентилятором, который имитирует отвод тепла нитью от цилиндра.

Рис. 3. Лабораторный стенд
Схема лабораторного стенда показана на Рис. 4.

Рис. 4. Схема лабораторного стенда
Процесс нагрева происходит следующим образом. Индуктор создает переменное магнитное поле, которое формирует в теле цилиндра вихревые токи Фуко. Они и нагревают цилиндр. Для получения информации о температуре цилиндра, в средней части индуктора, на жаростойкой прокладке установлен датчик, который находится в непосредственной близости от вращающегося цилиндра. Он имеет цифровой выход и подключен к регулятору, в роли которого выступает микроконтроллер. Температура цилиндра отображается на экране монитора компьютера, связанного с микроконтроллером, в виде графика.
С точки зрения технологов важна равномерность температуры цилиндра вдоль его рабочей поверхности. Для оценки этого показателя в системе предусмотрена дополнительная группа внешних датчиков, подключенных к цифровому табло.
Система автоматического регулирования реализована на базе микроконтроллера ATtiny2313 семейства AVR. На выходе контроллера формируется сигнал регулирующего воздействия в форме широтно-импульсной модуляции, который через оптореле обеспечивает питание индуктора. Регулятор позволяет реализовать пропорциональный и пропорционально - интегральный законы регулирования. Управление системой происходит программным способом с компьютера. В программе можно вводить заданную температуру и настройки регулятора, а именно коэффициент Кп для пропорционального закона, коэффициенты Кп и Ки для пропорционально - интегрального закона и допустимую ошибку регулирования в процентах.
Окно управляющей программы представлено на рис. 6.

Рис. 6. Окно управляющей программы
Окно включает несколько элементов:
1. Панель управления (подробнее показана ниже).
2. Панель отображения информации (слева).
3. Область графика температуры (вверху).
4. Область графика мощности (внизу).
Панель управления предназначена для контроля и управления процессом регулирования. С помощью этой панели происходит выбор закона регулирования и настройка его параметров, выбор режима управления (ручное или автоматическое), запуск процесса регулирования. В ручном режиме возможно задать только процент мощности. Он определяет долю максимальной мощности (440 Вт), подаваемой в индуктор.
В регуляторе реализованы П- и ПИ-закон регулирования.
Передаточная функция регулятора имеет вид:
 (в случае П - закона)
(в случае П - закона)
 (в случае ПИ - закона),
(в случае ПИ - закона),
Назначение органов управления поясняет рис. 7.

Рис. 7. Панель управления
Окно задания ошибки позволяет установить коридор допустимой ошибки регулирования, отображаемый в области графика температуры окна управляющей программы.
На монитор ПК выводится графическое изображение процесса регулирования и формируется файл отчета для дальнейшей обработки.
Вращение цилиндра осуществляется двигателем постоянного тока, частоту вращения которого можно менять переключением тумблера трансформатора. В положении 1 двигатель вращается со скоростью 300 оборотов в минуту, в положении 2 – 500 оборотов в минуту.
Порядок выполнения работы
4.1. По экспериментально полученной заблаговременно переходной характеристике объекта (рис. 8) определить параметры его передаточной функции: Ко=  (входным воздействием был скачок входной мощности
(входным воздействием был скачок входной мощности
22 Вт.), Т0 = Т2, Тд = Т1.
Преподаватель может предложить студентам самостоятельно снять переходную характеристику объекта отдельно при малых, больших оборотах двигателя и при включенном вентиляторе. В этом случае дальнейшая работа будет проводиться с учетом параметров объекта, полученных в указанных экспериментах.
Для самостоятельного получения переходной характеристики объекта необходимо включить персональный компьютер (ПК) и регулятор в сеть 220В, с разрешения преподавателя запустить программу следующим образом. Ярлык на рабочем столе – «Visual Baisic», затем «Recent» ® «VB6 Kalayanova» ® «Открыть» ® Старт «Ñ» ® Выбрать режим «Ручное» ® Установить 5% мощности ® «Пуск». Одновременно запустить секундомер. С интервалом 10 – 60 с. (в зависимости от скорости нагрева объекта) фиксировать текущую температуру объекта до выхода его на установившийся режим. Полученную характеристику обработать аналогично рис. 8, определив Ко= (входным воздействием был скачок входной мощности 22 Вт.), Т0 = Т2, Тд = Т1.
Рис.8. Переходная характеристика объекта
4.2. Используя найденные параметры и настроечные кривые (рис.9) определить коэффициенты Кр и Ти для П- и ПИ-закона для трех вариантов характера процесса регулирования: вариант а – апериодический процесс, б – с 20-процентным перерегулированием, в – с минимальной квадратичной площадью отклонения. На рис.9 по оси абсцисс показано отношение t/Т0,где t=Т1, Т0= Т2 (рис. 8). Следует учесть, что настроечные кривые предполагают запись передаточной функции регулятора в следующем виде:
 (в случае П - закона)
(в случае П - закона)

 (в случае ПИ - закона),
(в случае ПИ - закона),
и передаточную функцию объекта управления
 , причем Т1 = t, Т2 = Т0.
, причем Т1 = t, Т2 = Т0.
При выводе передаточной функции замкнутой системы (рис. 2) принять следующую комбинацию вход-выход САР: вход θз – выход θ.
4.3. Провести в компьютерном классе численное моделирование процесса регулирования в САР (компьютерная программа «Transient Process – Расчет переходных процессов по коэффициентам характеристического уравнения») при П– и ПИ– законах регулирования и параметрах настройки регулятора из п. 4.2. В программу ввести коэффициенты знаменателя ai и числителя bi передаточной функции замкнутой САР, а также f = 1 (в программе f = 1 означает скачок θз). В случае необходимости дополнительно проварьировать настройки регулятора, добиваясь наилучших показателей качества переходного процесса (быстродействия, перерегулирования, колебательности, а в случае П-закона и статической точности).
4.4. Выполнить экспериментальную часть работы получения процессов регулирования. Подготовить регулятор к включению. Включить персональный компьютер (ПК) и регулятор в сеть 220В, с разрешения преподавателя запустить программу управления следующим образом. Ярлык на рабочем столе – «Visual Baisic», затем «Recent» ® «VB6 Kalayanova» ® «Открыть» ® Старт «Ñ» ® «Автомат» ® Уточнить заданную температуру «350С» ® Ввести настройки kp, kи = 1/ Ти в зависимости от выбранного закона и «Ошибка» 5%.
4.5. Задать П-закон регулирования, для чего в опциях автоматического управления, в окне КП установить значение Кр, полученное в п. 4.3 для наилучшего результата процесса регулирования, в окне КИ установить 0. Задать меньшие обороты двигателя (переключатель скорости в положении «М»). Нажать кнопку «Пуск». Одновременно запустить секундомер.
Пронаблюдать процесс регулирования. С интервалом 10 – 30 с. (в зависимости от скорости процесса регулирования) фиксировать текущую температуру объекта и регулирующее воздействие (все три его составляющие). На графике регулирующее воздействие указывается в % от максимальной мощности нагревателя (440 Вт), шаг изменения мощности 4.4 Вт.
Дождаться, пока процесс выйдет на установившийся режим. Увеличить обороты двигателя, переключив тумблер в положение «Б». Вновь дождаться установившегося режима. Включить вентилятор. Дождавшись установившегося режима, зафиксировать статическую ошибку во всех трех режимах работы САР. В каждом случае оценивать неравномерность нагрева рабочей поверхности цилиндра в установившихся режимах с помощью трех внешних датчиков, подключенных к индикатору (цифровому табло). В графике процесса, выводимого на монитор компьютера, предусмотрен общий диапазон времени 47 минут.
Если исследованный процесс регулирования занял более 20 минут, то в окне заданной температуры установить значение 20°С, либо перейти в режим «Ручное» и установить 0% мощности. В обоих случаях дождаться, пока цилиндр фактически не остынет до 25 °С. Для ускорения процесса остывания можно включить вентилятор.
4.6. Задать ПИ – закон регулирования, для чего в опциях автоматического регулирования в окне КП и КИ установить значения КП = Кр и КИ =  найденные в п.4.3 для наилучшего варианта процесса регулирования. Пронаблюдать процесс регулирования, повторив операции, описанные в п.4.5. Убедиться в отсутствии статической ошибки.
найденные в п.4.3 для наилучшего варианта процесса регулирования. Пронаблюдать процесс регулирования, повторив операции, описанные в п.4.5. Убедиться в отсутствии статической ошибки.

а. б. в.
Рис. 9. Настроечные кривые П-, ПИ- и ПИД-регуляторов.
Переходный процесс:
а. – апериодический;
б. – с 20%-ным перерегулированием;
в. – с минимальной квадратичной площадью отклонения.
Содержание отчета по работе
Отчет о выполненной работе должен иметь следующее содержание:
5.1 Цель работы.
5.2 Результаты численного моделирования динамики САР.
5.3 Переходные характеристики объекта (в случае их самостоятельного получения).
5.4 Графики, зависимости температуры и регулирующего воздействия от времени, полученные в пп. 4.5, 4.6.
5.5 Выводы о влиянии возмущений (изменения оборотов двигателя и включения вентилятора) и параметров настройки П- и ПИ-закона регулирования на показатели качества процесса регулирования.

