




Автомобильно-дорожный государственный технический университет (МАДИ)
Кафедра Дорожно-строительных машин
Методические указания
По выполнению лабораторной работы
«ВЫБОР ОСНОВНЫХ ПАРАМЕТРОВ ДОРОЖНОГО КАТКА»
Профессор ЛокшинЕ.С.
Доцент Селиванов А.С.
Москва - 2016
РАБОТА
"ВЫБОР ОСНОВНЫХ ПАРАМЕТРОВ ДОРОЖНОГО КАТКА"
Цель работы
Изучение принципа работы дорожного катка, выбор и расчет основных параметров гладковальцового тандемного вибрационного катка, выполнение тягового расчета и баланса мощности дорожного катка.
Исходные данные
Работа выполняется по вариантам индивидуальных заданий приведенных в таблице №1
Таблица №1
Варианты индивидуальных заданий.
| № Варианта | |||||||||
| Масса катка, кг | |||||||||
| Скорость, км/час | 0-5.5 | 0-6.5 | 0-6.0 | 0-8.5 | 0-9.0 | 0-6.0 | 0-7.0 | 0-8.5 | 0-12.4 |
| 0-10.5 | 0-12.5 | 0-9.5 | 0-9.0 | 0-10.0 | 0-12.5 | 0-10.4 | 0-13.0 | 0-13.5 | 0-14.0 | 0-14.3 |
| 0-13.8 | 0-14.2 | 0-10.4 | 0-11.0 | 0-10.8 |
Методика и последовательность выполнения работ.
3.1. Общий обзор существующих отечественных и зарубежных машин.
По различным рекламным материалам фиксируются основные параметры тандемных гладковальцовых катков, которые заносятся в таблицу № 2.
Таблица №2
| Марка катка | ||||||||||
| Масса, т | ||||||||||
| Мощность кВт | ||||||||||
| Диаметр вальца, мм | ||||||||||
| Ширина вальца, м | ||||||||||
| Скорость км/час |
Примечание: Для более проведение анализа параметров катков, выборка должна быть не менее 10 машин массой от 1т до 14т.
3.2. Определение основных параметров проектируемого катка методом наименьших квадратов.
Приняв основным параметров массу катка "G", на основании собранных параметров, определяем используя метод наименьших квадратов следующие характеристики: мощность "N", диаметр вальца "d", ширина вальца "В". При этом полученные зависимости имеют следующий вид:
N=aG+b, d=aG+b, B=aG+b
где: а и b числовые коэффициенты.
Расчет параметров катка.
Выбор геометрических параметров
Основными параметрами катка являются: G-вес катка, q – линейное давление, D-диаметр вальца, В-ширина вальца.
Для двухвальцовых катков в связи с поворотами ширина вальцов не может быть выбрана излишне большой, так как в противном случае на поверхности появляются дефекты. Исходя из соображений устойчивости принимаем D=B/1,4…1,5
Определяем силу тяжести, приходящуюся на один валец:
 =0,4G=0,4mg
=0,4G=0,4mg
Линейное давление определяется исходя из силы тяжести, действующей на валец и ширины вальца.
ԛ1= 
 и соответственно ԛ2=
и соответственно ԛ2= 
Выбор основных параметров вибратора
Относительную величину возмущающей силы назначаем с учетом неравенства

где G – вес катка, н.
При таком соотношении между Р и G амплитуда колебаний вальца самоходного катка при уплотнении асфальтобетона находится в пределах а = 0,3 – 0,7 мм. Следует заметить, что при а = 0,3–0,7 мм вибровалец работает практически без отрыва от уплотняемой среды, а при большей амплитуде наблюдается отрыв катка и переход в режим вибротрамбования, что целесообразно при уплотнении дорожного основания. При больших амплитудах колебаний наблюдается потеря тяговой способности и боковой устойчивости, в связи с чем для качественного уплотнения дорожного основания используются дорожные катки иной конструкции.
Принимаем амплитуду колебаний а =0,5 мм
Для самоходных тандемных виброкатков рекомендуется частота 50–55 Гц..
Для проектируемого катка выберем частоту колебаний:  =50 Гц.
=50 Гц.
С другой стороны возбуждающая сила виброэлемента в каждый момент времени равна проекции на вертикальную ось центробежной силы, которая развивается при вращении дебаланса, а амплитудное значение возбуждающей силы Р равно центробежной силе, т.е.

где m – масса дебаланса, кг;  – угловая скорость вращения;
– угловая скорость вращения;  – эксцентриситет, т.е. радиус вращения центра тяжести массы дебаланса (исходя из конструкции вибровальца).
– эксцентриситет, т.е. радиус вращения центра тяжести массы дебаланса (исходя из конструкции вибровальца).

Отсюда найдем массу дебаланса:
Статический момент дебаланса:
 =m
=m 
Для дебаланса выбираем Сталь 45.
Технические характеристики Стали 45:
– Плотность стали –  =(7,7–7,9)
=(7,7–7,9)  кг/
кг/  ;
;
Определим площадь поперечного сечения вала виброблока:

где:  - суммарный запас прочности,
- суммарный запас прочности,  – допустимое напряжение при срезе 65 МПа.
– допустимое напряжение при срезе 65 МПа.
Из этой же зависимости определяем диаметр вала виброблока:

Тяговый расчет
Определяем общее сопротивление передвижению катка:

где W1 – сопротивление передвижению катка как тележки, с учетом преодоления уклонов;
W2 – сопротивление от преодоления сил инерции при трогании катка с места;
W3 – сопротивление движению катка на поворотах, возникающее вследствие затрудненности вращению вальцов катка при их повороте;
 - сопротивление от трения в подшипниках.
- сопротивление от трения в подшипниках.
Определяем сопротивление передвижению катка как тележки:

где f = 0,1…0,05 коэффициент сопротивления перемещению катка;
i = 0,08 – уклон;
кб = 1,1 коэффициент учитывающий увеличение коэффициента сопротивления качению при работе с вибратором
Определяем сопротивление от преодоления сил инерции при трогании катка с места:

где V м/c – рабочая скорость движения катка;
t = 2 c-время разгона; Определяем сопротивление движению катка на криволинейных участках:

где к1 = 0,2 – коэффициент сопротивления для плотной поверхности;
W4 – сопротивление трения в подшипниках.
W4=k G
k = 0,02 – Коэффициент трения в подшипниках.
Определим силу тяги катка по сцеплению:

где φсц =0,5 – коэффициент сцепления;
Для нормальной работы катка необходимо, чтобы выполнялось условие:

Проверяем выполнение условия для нормальной работы катка.
3.3.4. Баланс мощности
Мощность необходимая для работы катка определяется по формуле:

где: N1 – мощность необходимая на привод хода;
N2 – мощность необходимая для привода вибратора;
 – мощность необходимая для привода механизма поворота.
– мощность необходимая для привода механизма поворота.
Мощность необходимая на привод хода определяется по формуле:
где ηобщ – общий КПД привода;
Общий КПД привода определяется по формуле:
ηобщ = ηред ηг.пр ;
где ηред = 0,9 – КПД редуктора привода хода;
ηг.пр = 0,8 – КПД гидропривода;
ηобщ = 0,9 ·0,8 = 0,72;
Мощность, необходимая для привода вибратора:

где: Nпк – мощность необходимая для сообщения уплотняемому материалу колебаний;
Nп – мощность необходимая для привода вибратора;
Nр – мощность необходимая для разгона дебалансов;
Мощность на поддержание колебаний определяется по формуле:
где a =0.4÷ 0,7 мм – амплитуда колебаний;
ω – угловая скорость вращения;
β = 120 – коэффициент вязкости уплотняемого материала;
Угловую скорость определяем по формуле:

где n об/мин – частота вращения вала вибровозбудителя;
Определяем мощность, привода вибратора:

где f = 0,01 – коэффициент трения качения подшипников;
 – коэффициент неучтенных потерь (1,5);
– коэффициент неучтенных потерь (1,5);
P – вынуждающая сила, н;
d –диаметр вала виброблока, м;
n – число оборотов вибратора об/сек
Определяем мощность, необходимую для разгона дебалансов:
где I – момент инерции;
 расстояние от центра тяжести дебаланса до оси вращения.
расстояние от центра тяжести дебаланса до оси вращения.
t = 1…2с – время разгона дебалансов;
Определяем мощность для привода механизма поворота.
Для определения мощности потребляемой рулевым механизмом катка необходимо определить мощность гидронасоса привода руля

где:  - давление привода насоса-дозатора рулевого механизма, бар; Q – расход требуемый для насоса-дозатора л/мин;
- давление привода насоса-дозатора рулевого механизма, бар; Q – расход требуемый для насоса-дозатора л/мин;  - механический КПД гидронасоса (0.82…0.85).
- механический КПД гидронасоса (0.82…0.85).
Величина  , определяется настройкой предохранительного клапана (140…150 бар).
, определяется настройкой предохранительного клапана (140…150 бар).
Q – расход насоса зависит от конструкции и параметров гидроцилиндра поворота, количества поворотов руля из крайних положений, которое для дорожного катка может приниматься равное 5…7 оборотов.
Диаметр цилиндра поворота определяется по следующей зависимости:
где:  - коэффициент трения стали по грунту (0,15…0,2)
- коэффициент трения стали по грунту (0,15…0,2)
Рабочий ход поршня гидроцилиндра поворотного механизма составляет от 100 до 300 мм в зависимости от массы и конструкции катка.
Объём гидроцилиндра поворота равен:


Расход насоса-дозатора за один оборот руля составит:

где:  - расход насоса-дозатора за один оборот руля см³/об;
- расход насоса-дозатора за один оборот руля см³/об;  - полное число оборотов руля из крайних положений (5…7 об).
- полное число оборотов руля из крайних положений (5…7 об).
Исходя из удельного расхода жидкости за оборот выбираем насос-дозатор по табл. 2 и там же находим его расход Qн л/мин.
Мощность необходимая для привода рулевого механизма составит:
Общая мощность дорожного катка:

На основании проведенных расчетов выбирается двигатель (источник каталоги двигателей).
Пригодность двигателя определяется из следующего неравенства.

4. Подбор основного гидрооборудования.
Исходные данные для подбора гидронасоса привода хода определяются следующим образом:
 л/мин
л/мин
 см³/об
см³/об
где:  - расход гидронасоса хода;
- расход гидронасоса хода;  - механический КПД гидронасоса;
- механический КПД гидронасоса;  - удельный расход гидронасоса хода;
- удельный расход гидронасоса хода;  - число оборотов двигателя (2000…2500 об/мин)
- число оборотов двигателя (2000…2500 об/мин)
Аналогично определяются параметры для выбора гидронасосов привода вибратора и привода рулевого механизма, при этом привод вибратора и рулевого механизма может осуществляться от одного насоса, для этого в гидросхему должен быть введен делитель потока.
Q∑ = Qв +Qр; q∑ = qв + qр.
где: Q∑ - суммарный расход насоса; Qв – расход необходимый для привода вибратора; Qр – расход для привода руля; q∑ - суммарный удельный расход насоса; qв – удельный расход для привода вибратора; qр – удельный расход для привода руля.
Результаты проведенных расчетов заносятся в таблицу.
Таблица №1
Роликоподшипники радиальные с короткими цилиндрическими роликами.
Средняя серия тип 42000
| Обозначение | d мм | D мм | B мм | Коэф. Работоспо собности «С» | nmax об/мин | Q доп кг | Масса кг |
| 35 000 | 10 000 | 1 600 | 0.2 | ||||
| 45 000 | 10 000 | 2 100 | 0.3 | ||||
| 54 000 | 8 000 | 2 600 | 0.5 | ||||
| 66 000 | 8 000 | 3 000 | 0.7 | ||||
| 90 000 | 6 300 | 4 200 | 0.9 | ||||
| 100 000 | 6 300 | 4 900 | 1.2 | ||||
| 132 000 | 6 300 | 6 200 | 1.7 | ||||
| 158 000 | 5 000 | 7 600 | |||||
| 170 000 | 5 000 | 8 500 | 2.5 | ||||
| 200 000 | 5 000 | 10 000 | 3.1 | ||||
| 230 000 | 4 000 | 11 500 | 3.7 | ||||
| 240 000 | 4 000 | 12 000 | 4.4 | ||||
| 290 000 | 4 000 | 14 500 | 5.2 | ||||
| 320 000 | 3 200 | 16 000 | 6.1 | ||||
| 400 000 | 3 200 | 17 000 |
Таблица №2
| Параметры | ОН | ОН | ОН | ОН | ОН | ОН | ОН | ОН | ОН | ОН | ОН |
| Расход см³/об | 39.6 | 49.5 | 65.6 | 79.2 | 123.8 | 158.4 | 247.5 | 316.8 | |||
| Расход л/мин | |||||||||||
| Давление bar | |||||||||||
| Давление Предох-рани- тельного клапана bar | 80- | 80- | 80- | 80- | 80- | 80- | 80- | 80- | 80- | 80- | 80- |
| Max давле ние на сливе bar |
Параметры насос-дозаторов (гидрорули)
Приложение 1
Метод наименьших квадратов
Уравнение имеет вид  – линейное уравнение. В этом уравнении известны пары
– линейное уравнение. В этом уравнении известны пары  ,
,  , n - количество экспериментальных данных. Для нахождения
, n - количество экспериментальных данных. Для нахождения  и
и  воспользуемся методом наименьших квадратов.
воспользуемся методом наименьших квадратов.
Функция двух переменных принимает наименьшее значение

| (1) |
При данных  и сумма квадратов отклонений экспериментальных данных от найденной прямой будет наименьшей.
и сумма квадратов отклонений экспериментальных данных от найденной прямой будет наименьшей.
Чтобы найти коэффициенты, находим частные производные функции по переменным и и приравниваем эти производные к нулю. Полученная система решается методом Краммера и получаем формулы для нахождения коэффициентов по методу наименьших квадратов
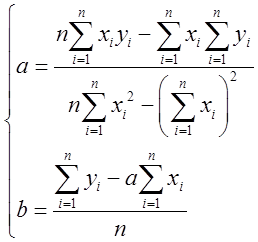 . .
|
При данных и  функция (1) принимает наименьшее значение.
функция (1) принимает наименьшее значение.


