




Механизмы для передачи поступательного движения
При передаче поступательного движения используются передачи с тягами (трос, лента, цепь и т. п.) или толкателями (стержень, шток и т. п.). Тяга может передавать движение только в одну сторону, толкатель с закрепленными концами передает движение в две стороны.
Проблемы с точностью передачи движения здесь такие же, как и при передаче вращения.
Механизмы для передачи движения через шарниры
При передаче движения через шарниры на поворачивающиеся в шарнире звенья возникает проблема связанности движений – основного движения в шарнире и передаваемого через шарнир движения. Пример передачи со связанными движениями приведен на рис. 6.25.
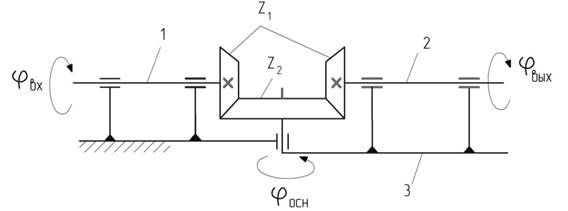
Рис. 6.25. Механизм со связанными движениями:
1 – шарнир; 2 – звено основного движения; 3 – входной вал передаваемого движения; 4 – выходной вал передаваемого движения;
5 – конические зубчатые колеса с числом зубьев z 1 и z 2
При неподвижном звене 2 jосн = 0 и вращении вала 3 jвх = jвых.
При неподвижном вале 3 (jвх =0) и повороте звена 23 зубчатое колесо выходного вала катится по неподвижному центральному колесу: jвых = jосн× z 2/ z 1 ¹ 0. При одновременном вращении вала 3 и повороте звена 2: jвых = jвх ± jосн× z 2/ z 1. Для того, чтобы всегда было jвых = jвх, необходимо компенсировать добавку jосн× z 2/ z 1.
Компенсация добавки может быть выполнена механически или путем введения дополнительных передач, однако проще это сделать программным путем, как это и происходит в современных приводах.
Механизмы тормозов, фиксаторов и стопоров
Для фиксации привода после отключения двигателя в состав механизмов вводят тормоза, фиксаторы и стопоры. Фиксаторы и стопоры также часто служат для уменьшения погрешности позиционирования исполнительного звена привода. В технологических машинах, в отличие от транспортных, непосредственно для торможения и остановки механизма тормоза используются достаточно редко.
Тормоза в приводе обычно устанавливают на звеньях, для торможения которых требуется минимальное тормозное усилие. В приводах с редуктором таким звеном является входное звено редуктора, в приводах с мультипликатором таким звеном является выходное звено мультипликатора.
В современных приводах вращения наибольшее распространение получили дисковые тормоза, которые в отличие от барабанных, обладают рядом преимуществ, главными из которых являются удобство компоновки, компактность и высокая эффективность, при этом тормоза часто встраивают внутрь двигателя (рис. 6.26). Основными элементами таких тормозов являются катушка 3, выполненная в виде кольца, подвижный якорь 4, которые вместе образуют электромагнит и тормозная колодка 6.

Рис. 6.26. Тормоз, размещенный внутри электродвигателя:
1- задний фланец электродвигателя, 2- вал двигателя, 3 - катушка, 4 - якорь электромагнита, 5- шпонка, 6 - тормозная колодка, 7- крыльчатка
В исходном состоянии при выключенном двигателе на катушку ток не подается. Тормоз находится в заторможенном состоянии, вал двигателя 2, через шпонку 5, фрикционную пару 6-4 замкнут на фланец 1. Замыкание обеспечивает пружина 8. При подаче напряжения на катушку 3, якорь смещается влево, сжимает пружину, выбирая зазор ∆, и зазор уже образуется между якорем соединенным с фланцем и тормозной колодкой, установленной на шпонке. Вал двигателя может свободно вращаться. Справа за тормозом установлена крыльчатка 7 воздушного охлаждения тормоза и двигателя. Кожух на рис. 6.26. условно не показан.
Чтобы получить большой тормозной момент поступают следующим образом:
- используют специальные фрикционные материалы с высоким коэффициентом трения в паре;
- увеличивают усилие прижима колодок, например, за счет замены электромагнитного привода на пневматический или гидравлический;
- увеличивают диаметр фрикционной пары;
- устанавливают несколько фрикционных пар в одном тормозе, увеличивая таким образом площадь трущихся поверхностей.
Для торможения приводов также используют фрикционные электромагнитные муфты. Многодисковые электромагнитные муфты - тормозные и обычные получили широкое распространение в технологических машинах. Такие муфты имеют набор фрикционных пар 1, на рис. 6.27 их шесть.

Рис.6.27. Многодисковая фрикционная муфта:
1 - набор фрикционных дисков; 2 - фланец; 3 - полый вал
Внешние фрикционные диски фиксируются относительно фланца 2, внутренние - относительно полого вала 3. Если фланец 2 соединить с неподвижным корпусом, то муфта будет тормозной, если с другим валом, то муфта будет соединительной. Катушка с проводниками на рис. 6.27 условно снята. Подшипник муфты 4 "развязывает" вращающийся полый вал 3 относительно неподвижной катушки. Такая многодисковая муфта не имеет замыкающего упругого элемента - пружины и поэтому в исходном состоянии при незапитанной катушке является расторможенной.
В грузоподъемных механизмах получили распространение барабанные тормоза, которые хорошо встраиваются в простые модульные конструкции, например, башенных кранов (рис. 6.28). По своей функции тормоза грузоподъемных механизмов должны, не только фиксировать звенья механизма, что характерно для технологических машин, но и удержать поднимаемый груз при отключении электропитания. Поэтому тормоза грузоподъемных машин, как правило, обеспечивают большие усилия и имеют значительные габариты.

| 
|
| Рис. 6.28. Барабанные тормоза грузоподъемных механизмов |
Фиксаторы и стопоры чрезвычайно широко применяются в механизмах и машинах, начиная от простейших дверных замков и заканчивая сложнейшими механизмами причаливания орбитальных космических аппаратов. Как правило, фиксаторы и стопоры используются в цикловых механизмах и они, в отличие от тормозов, фиксируют выходное звено механизма. Следует различать механизмы фиксаторов и стопоров.
Механизм стопорения – устройство, останавливающее и удерживающее звенья механизма в определенном положении при наличии самоторможения в направлении перемещения удерживаемого звена.
Механизм фиксации – устройство для удержания перемещаемого звена в заданном положении при отсутствии самоторможения в направлении перемещения удерживаемого звена.
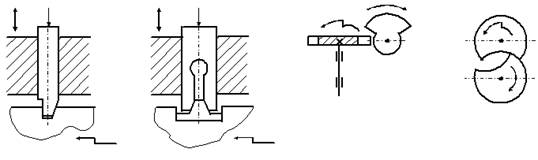
Включаются стопоры принудительно или автоматически, а выключаются только принудительно (рис. 6.29). Усилие фиксаторов и стопоров обычно создается с помощью пружин (нежестким звеном).
а б в г
Рис. 6.29. Типовые схемы стопоров:
а - клиновой стопор, б - стопор беззазорный, в, г - кулачковые стопоры
При превышении заданного значения усилия фиксатор освобождает удерживаемое звено. В отличие от стопора фиксатор включается и выключается автоматически (рис. 6.30).

Рис. 6.30.Типовые схемы фиксаторов положения
1 - ползун; 2 - шарик; 3 - ролик; 4 - плоская пружина; 5 - пружина сжатия;
6 - пружина растяжения
Пример схемы механизма со стопором представлен на рис. 6.31.

Рис. 6.31. Пример механизма с устройством стопорения:
1 - карусель; 2 - устройство стопорения; 3 - тормоз; 4 - храповой механизм;
5 - передача рейка-шестерня; 6 - пневмоцилиндр
Стопоры и фиксаторы рассчитывают с целью определения контактных напряжений, влияющих на износостойкость стопора, выбора пружины по потребному усилию стопорения и оценки деформации самого стопора.
При расчете стопоров и фиксаторов считают, что во время стопорения происходит доведение карусели до положения, определяемого стопором, т.е. стопор выполняет роль двигателя. На рис. 6.32 представлена расчетная схема стопорения карусели. Будем считать, что при стопорении происходит перемещение карусели на угол j.
Уравнение равновесия карусели будет иметь следующий вид:
Мф - Ми - Мт - Мс = 0, (6.37)
где Мф, Ми, Мс, Мт – момент, создаваемый стопором, моменты сил инерции, сил трения и технологических усилий, приведенные к карусели,
или
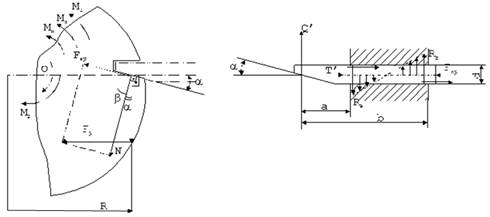
Рис. 6.31. Расчетная схема стопорения карусели
Мф - Yпр×j¢¢ - Мт - Мс = 0,
где Yпр – момент инерции механизма, приведенный к карусели;
j - текущее значение угла поворота карусели.
Дважды интегрируя уравнение и найдя постоянные интегрирования, получим:
Мф.t2/2= Yпр×j + t2/2×(Мc + Мт), (6.38)
где t – время стопорения карусели

6.32. Погрешность стопорения каресели
При расчетах как правило используется не угол j, а линейная погрешность D, которые связаны простейшим соотношением
j = D/R, (6.39)
где D - исходная погрешность положения карусели,
R – радиус установки стопора.

