




Мембрана – гибкая круглая пластина, получающая упругие прогибы под действием давления или сосредоточенной силы. Они бывают плоскими или гофрированными. Используются в качестве разделителя двух сред и гибких уплотнителей д/передачи перемещений из области давления в область разряжения.
Коэф. жесткости при изгибе здесь можно пренебречь, поскольку толщина мембраны гораздо меньше ее радиуса (по крайней мере в 200 раз). Приложенное давление к одной из сторон мембраны сферически выгибает ее. При низких значениях давления р отклонение центра мембраны zm и ее механическое напряжение ат являются квазилинейными функциями давления (напряжение измеряется в Н/м2):

| 
|
где r – радиус мембраны, g – ее толщина. Механическое напряжение мембраны считается постоянным по всей ее поверхности.
Д/нахождения наименьшей собственной частоты мембраны можно воспользоваться следующим соотношением:

| где р – плотность материала мембраны. При значительной толщине мембраны, когда отношение r/g<100, речь уже идет о тонкой пластине. |
Д/пластины, также как и для мембраны, максимальное отклонение линейно связано с давлением:

| где Е – модуль Юнга (Н/м2), v – коэффициент Пуассона. |
Мах механическое напряжение в пластине является линейной функцией давления:

В вышеизложенных уравнениях предполагается, что разрабатываемый датчик давления будет измерять отклонения мембраны или пластины. Поэтому далее необходимо выбрать метод преобразования полученного отклонения в электрический сигнал.
Диаметры мембран обычно выбирают в диапазоне от 10 до 300 мм. Их изготавливают из высококачественной пружинной стали и бронзы, а также из неметаллических материалов: резины, пластмасс, которые в некоторых случаях армированы тканью из капрона, стекла или металлической нити.
В зависимости от геометрии мембраны могут иметь по давлению как линейные, так и упругие нелинейные характеристики.
При анализе деформации мембран рассматривают два случая:
1) Малые прогибы, при которых противодействие мембраны обусловлено в основном изгибом материала. В этом случае срединная плоскость, равностоящая от поверхностей, практически не удлиняется. В этом случае мембрана имеет характеристику близкую к линейной;
2) При больших деформациях происходит в основном растяжки срединной плоскости. В этом случае анализ производят по теории «абсолютно гибкой» мембраны без учета жёсткости на изгиб.

| По мере увеличения прогиба форма пов-ти мембраны изменяется. По мере деформации точка смещается к месту заземления. |
В отличие от плоских гофрированные мембраны имеют волнообразный профиль, под которым понимают образующую срединной поверхности.
Эти мембраны применяют чаще плоских:
- они могут работать при значительно больших прогибах;
- в зависимости от формы профиля упругая характеристика может быть линейной, затухающей, возрастающей.
Это позволяет в сочетании с другими нелинейными элементами обеспечивать характеристику ПИП близкую к линейной.
| Манометр с одиночной мембраной (пример ПИП) Конструкция мембраны существенно упрощается, если две мембраны соединить по буртику в мембранную коробку. Это же позволяет вдвое увеличить прогиб упругого элемента. |
ПИП на основе сильфонов. Манометрические трубчатые пружины.

| Сильфоны представляют собой симметричную трубчатую гофрированную оболочку. Благодаря своей форме сильфоны могут совершать значительное перемещение под действием давления, осевой или поперечной силы и изгибающего момента |
Сильфоны обладают относительно большой площадью поверхности, что дает возможность получать довольно существенные перемещения даже при небольших давлениях. Жесткость цельного металлического сильфона пропорциональна модулю Юнга материала и обратно пропорциональна внешнему диаметру и количеству изгибов на нем. Жесткость сильфона также связана кубической зависимостью с толщиной его стенок.
Их часто используют в качестве чувствительного элемента в манометрах, в манометрических термометрах, пневматически регулируемых аппаратах.
Манометрический парожидкостный термометр (пример).
 Манометрические трубчатые пружины представляют собой тонкостенную кривую трубку вытянутого поперечного сечения.
Манометрические трубчатые пружины представляют собой тонкостенную кривую трубку вытянутого поперечного сечения.
| Пружина (трубка) Бурдона (пример).
 По сравнению с сильфонами или мембранами трубчатые пружины обладают малой тяговой силой. В большинстве случаев это явление недостаточное.
По сравнению с сильфонами или мембранами трубчатые пружины обладают малой тяговой силой. В большинстве случаев это явление недостаточное.
|
Но при измерении больших давлений по схеме силовой компенсации слишком большая тяговая сила усложняет конструкцию. Использование трубчатых пружин упрощает конструкцию.
Применение манометрических трубчатых пружин в различных манипуляторах и устройствах передачи движения в вакууме. Использование этих элементов позволило снизить существенно трение, вес и увеличить надежность устройства.
1. Струнные ПИП
Классификация струнных ПИП

Принцип действия струнных измерительных приборов. Принцип действия струнного датчика основан на зависимости собственной частоты колебаний натянутой струны длинной l и массой m от силы натяжения F:
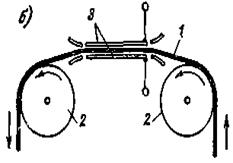
Струнный датчик для измерения давления.

| При изменении давления Р изменяется сила натяжения струны. С помощью возбудителя 2 (электромагнита), струна выводится из состояния равновесия и начинает колебаться с частотой f, определяемой давлением Р. При воздействии на струну измеряемой силы струна практически не растягивается, поэтому первичный преобразователь работает, почти не деформируясь. |
Приемник 3 преобразует перемещение струны с частотой f в эл. сигнал такой же f. В качестве приемника 3 используется электромагнитный датчик (может использоваться индуктивный или емкостной). Приемник 3 может попеременно выполнять функции то возбудителя, то приемника. Когда на его обмотку подается напряжение, то он создает электромагнитную силу притяжения струны и возбуждает ее колебания. А когда струна уже колеблется, то с этой же обмотки снимается переменное напряжение, частота которого равна частоте колебаний струны.
Струна представляет собой высокодобротную механическую колебательную систему с линейно-распределёнными параметрами, собственная частота поперечных колебаний струны определяется силой продольного натяжения.
Струнные датчики используются в приборах д/измерения силы, давления, расхода, температуры, перемещения, ускорения и др. неэл. величин. На базе струнных датчиков созданы также цифровые электроизмерительные приборы постоянного и переменного тока. Диапазон измерения вых. сигнала – частоты – составляет 300-500 Гц. Д/исключения помех промышленной частоты увеличивают минимальное значение частоты.
ПИП для малых перемещений.

| 1 – корпус; 2 – струна; 3 – подвижное коромысло; 4 – пружина, удерживающая подвижное коромысло; 5 – измерительный наконечник; 6 – деталь, высоту которой контролируют или измеряют. |
Принцип действия: при изменении высоты детали h коромысло отклоняется влево или вправо. В результате натяжения пружины будет меняться напряжение и, следовательно, будет меняться частота автоколебаний. Т.о. можно будет судить об изменении высоты h.
Преобразователь температуры.

| 1 – корпус; 2 – струна; aстр, aк – коэффициенты линейного расширения струны, корпуса.  При изменении температуры окружающей среды будет меняться натяжение струны.
При изменении температуры окружающей среды будет меняться натяжение струны.
|
Для всех рассмотренных выше схем струнных ПИП функция преобразования может быть записана в виде:

FH - сила натяжения,
M – масса,
l – длина
2. Принципы построения измерительных преобразователей на поверхностных акустических волнах
Поверхностные акустические волны – механические, упругие волны, распространяющиеся по свободной поверхности твердого тела или вдоль границы твердого тела с другой средой и затухающие при удалении от границы. Эти волны возбуждаются на поверхности и затухают при распространении вглубь кристалла, эффективно проникая лишь на глубину порядка длины волны. Волны ПАВ могут иметь вертикальную поляризацию, когда смещение частиц в волне происходит перпендикулярно границе, или горизонтально, когда смещение частиц происходит параллельно границе, но перпендикулярно направлению распространения волны. Важнейшие свойства ПАВ – сравнительно небольшая (1,6-4,0 км/с) скорость распространения.
Принцип действия датчиков на основе ПАВ заключается в том, что измеряемый параметр влияет на скорость распространения волны, что в свою очередь вызывает изменение временного интервала между входным и выходным сигналами.
Д/возбуждения ПАВ в пьезоподложках в подавляющем числе случаев используются встречно-штыревые преобразователи (ВШП), представляющие систему из двух вложенных одна в другую гребенок проводящих электродов.
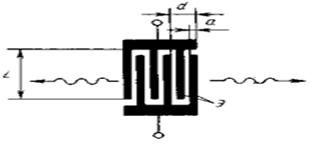
| С помощью ВШП осуществляется как прямое преобразование электрических сигналов в акустические волны, так и обратное преобразование энергии этих волн в электрический сигнал. |
При подаче между двумя решетками переменного напряжения с частотой f через пьезоэффект на поверхности подложки возникают периодически меняющиеся по знаку в пространстве механические напряжения, приводящие к возбуждению поверхностной волны. Если решетки выполняются эквидистантными (d=const), то можно подобрать частоту возбуждающего напряжения, при которой волны деформаций возбуждаемые м/д парами соседних электродов, будут синфазно суммироваться, обеспечивая наиболее эффективное преобразование электрической энергии в акустическую волну.

| где V – скорость распространения ПАВ | (1) |
Увеличение числа штырей N в ВШП улучшает избирательность преобразователя. Критические значения числа штырей NКР, д/которых отражения начинают искажать АЧХ и ФЧХ преобразователей, зависят от величины ΔV/V материала. Чем больше ΔV/V (больше км), тем меньше NКР. Для пьезокварца, у которого эффект ΔV/V мал, NКР ≈100…200.
При изготовлении наиболее широкое применение получили пьезокварц, ниобат и танталат лития, германат висмута, берлинит, пленки нитрида алюминия, окиси цинка, сульфида кадмия.
В датчиках на ПАВ преимущественно используется пьезокварц, а из сильных пьезоэлектриков – ниобат лития. Перспективным представляется использование в качестве материалов подложек – звукопроводов для ПАВ монокристаллического кремния. В этом случае для возбуждения ПАВ применяют пьезоэлектрические пленки ZnO.
Изменения параметров ПАВ при воздействиях на подложку механических нагрузок порождаются, как и в случае с температурными воздействиями, изменениями геометрических размеров подложек, а также упругих констант и плотности, ответственных за вариации скорости ПАВ. Чувствительность к механическим воздействиям в существенной степени определяется нелинейными упругими свойствами, которые учитываются в расчетах с помощью упругих модулей третьего порядка. Повышение точности расчета достигается, если учитывается характер распределения статических напряжений и деформаций не только вдоль поверхности подложки, но также и вглубь.

| Схематически конструкцию измерительного преобразователя на ПАВ можно представить в следующем виде. ВШП представляет собой систему из двух вложенных в друг друга гребёнок, проводящих электроны. Устройство конструируется либо в виде линии задержки, либо в форме резонатора стоячей волны. |
Резонаторные датчики на ПАВ. В конструкции резонаторных датчиков на ПАВ на конце активной поверхности с каждой стороны формируется эшель (отражательная дифракционная решетка, концентрирующая излучение в спектрах высокого порядка).
От нее происходит отражение волны по направлению к центру прибора, в результате чего формируется стоячая волна. Чувствительный и активный электроды вместе с усилителем, имеющим автоматический контроль коэффициента усиления, образуют цепь положительной обратной связи, которая позволяет сохранять условие резонанса.

| Датчик на ПАВ резонаторного типа Изменение времени распространения м/д излучающим и приемным электродами приводит к изменению резонансной частоты ω. |
Резонансная частота вычисляется по формуле:
 (2)
(2)
Φ – сдвиг фазы усилителем; п – номер возбуждаемой моды, τ – время задержки, которое зависит от воздействия измеряемой величины.
Датчики массы, газовые сенсоры и датчики влажности.
Простейший датчик массы (микровесы) можно создать, используя принцип распространения ПАВ. Изменения массы, вызванные, например, процессом испарения, влияют на скорость распространения волны, что в свою очередь приводит к изменению частоты. Изменение частоты описывается выражением
 (3)
(3)
где µ - масса на единицу площади, k1 и k2 — константы материала.
Для кварца Y-среза k1 = -9,8-10-8 и k2 = -4,18-10-8 м2с/кг. Можно проводить измерения массы в 1 пикограмм.
На датчик нанесено покрытие, на которое абсорбируются молекулы того газа, который нужно обнаружить. Это поглощение изменяет свойства интерфейса между покрытием и подложкой, что приводит к изменению времени распространения волны. При использовании этого эффекта в резонансных датчиках происходит изменение резонансной частоты.
Датчики температуры.
Датчик температуры на ПАВ на подложке LiNbO3 – прибор резонаторного типа, в котором резонансная частота зависит от температуры. В результате теплового расширения подложки происходит увеличение времени распространения ПАВ. Температурная зависимость частоты определяется выражением:

где α1 и α2 — коэффициент теплового расширения и температурный коэффициент скорости соответственно. Прибор работает на частоте около 40 МГц в интервале температур от -50°С до +150°С с постоянной чувствительностью 4 Гц/0С. Достигается разрешение равное 0,001°С и воспроизводимость ±0,2°С.
Датчики деформации.
Линии задержки на ПАВ могут использоваться для измерения деформации, если напряжения в материале не влияют на скорость распространения ПАВ, изменения фазы волны происходят только из-за изменения физической длины пути распространения волны под действием напряжений.

Т.к. отношение Δl/l определяет деформацию при растяжении ε, получаем, что Δφпропорционально ε, на миниатюрном кантилевере или подобной структуре, можно получить акселерометр. Аналогично с использованием кварцевой мембраны можно создать датчик давления. Датчики деформаций размещают на защищенной стороне мембраны так, чтобы жидкость не могла контактировать с областью расположения ус-ва на ПАВ, поскольку это тоже может вызвать изменение частоты.
Датчики магнитного поля.
Если тонкая пленка материала, обладающего магнитоупругими свойствами, помещается на прибор ПАВ, то при наличии магнитного поля вдоль границы слоев возникает механическое напряжение поскольку изменяется длина магнитоупругой пленки. Эти напряжения влияют на скорость распространения ПАВ.
Свойства этих приборов:
- высокое разрешение;
- возможность объединить чувствительную структуру и электронику на одном кристалле;
- возможны дистанционные измерения;
- потенциально пригодны для массового производства с использованием единой технологии.
Недостатки таких приборов:
- невысокая долговременная стабильность;
большая чувствительность к влиянию температуры и влажности. (Использование «компенсаторных» схем поможет преодолеть некоторые из этих недостатков.
3. Индуктивные, индукционные, трансформаторные и вихретоковые ПИП
Индуктивные ПИП.
К индуктивным и трансформаторным преобразователям относятся разновидности э/м преобразователей, у которых при воздействии измеряемой неэлектрической величины изменяются коэффициенты самоиндукции или взаимоиндукции в электромагнитной системе. Входной величиной является линейное или угловое перемещение, а выходной – индуктивность или напряжение переменного тока.

| Простейшие э/м преобразователи малых перемещений состоят из неподвижного П-образного магнитопровода 1 с обмоткой 2 и подвижной части магнитопровода – якоря 3. |
В преобразователе на рис. а под воздействием вх. величины Хн.эл. изменяется зазор δ м/д подвижной и неподвижной частями магнитопровода, а в преобразователе на рис. б изменяется площадь S0 воздушного зазора при горизонтальном перемещении якоря 3.
Магнитное сопротивление магнитопровода будет равно:

где lСТ – средняя магнитных силовых линий в ферромагнитных участках магнитопровода; μСТ – магнитная проницаемость мат-ла магнитопровода; SСТ – поперечное сечение магнитопровода; δ, μ0 и S0 – д/воздушных зазоров.
Изменение величины зазора δ или площади S0 приводит к изменению L. Такие преобразователи называют индуктивными.
Индукционные ПИП.
На рисунке изображены индукционные преобразователи с линейным (а) и угловым (б) перемещением катушки. При своем перемещении витки катушки пересекают под прямым углом линии магнитного поля, и в них индуцируется ЭДС. Если линейное перемещение Δl является некоторой функцией времени  , мгновенное значение ЭДС
, мгновенное значение ЭДС

|  где
где  - число витков катушки; - число витков катушки;  - индукция в зазоре; - индукция в зазоре;  - активная длина витка. - активная длина витка.
|
На рис. а изображена схема устройства датчика с индукционным преобразователем для измерения скорости вращения. На валу 1 укреплен стальной зуб 3, который при вращении вала проходит мимо зазора неподвижно установленной магнитной системы 2 с постоянным магнитом, уменьшая магнитное сопротивление зазора этой системы согласно кривой  (рис. б). В катушке, надетой на магнит, наводятся импульсы ЭДС, примерная форма которых представлена кривой е (рис. в).
(рис. б). В катушке, надетой на магнит, наводятся импульсы ЭДС, примерная форма которых представлена кривой е (рис. в).

| Частота вых. импульсов в герцах всегда будет равна числу оборотов вала в секунду. |
В качестве индукционных преобразователей для измерения скорости применяют синхронные генераторы с ротором в виде постоянного магнита. Если число пар полюсов ротора равно  ,то частота выходного сигнала
,то частота выходного сигнала
 ,
,
где - круговая скорость вращения, рад/с;  - число оборотов в минуту. Частота таких датчиков не превышает несколько сотен герц.
- число оборотов в минуту. Частота таких датчиков не превышает несколько сотен герц.
В преобразователях второй группы постоянный магнит и катушка неподвижны, а индуцированная ЭДС наводится путем изменения магнитного потока вследствие колебаний полного магнитного сопротивления магнитной цепи, создаваемых изменением воздушного зазора в этой цепи.
Применение индукционных преобразователей.
Индукционные преобразователи, представляющие собой небольшие генераторы постоянного тока, используются в приборах для измерения скорости вращения валов, а также в приборах для измерения линейных и угловых вибраций. Т.к. вых. напряжение индукционных преобразователей пропорционально скорости вибраций подвижной части, то для получения напряжения, пропорционального амплитуде вибраций или ускорений, выходное напряжение индукционного преобразователя подвергается интегрированию или дифференцированию с помощью интегрирующих или дифференцирующих цепей.
Индукционные преобразователи исп-ся и д/измерения объемного расхода жидкости (газа), протекающего по трубопроводу в единицу времени. Индукционные преобразователи м.б. использованы для измерения постоянного ускорения и скорости. Широкое распространение для измерения скорости получили различного рода тахометры.
Трансформаторные ПИП.
Принцип действия трансформаторных преобразователей основан на изменении коэффициента взаимоиндукции обмоток при перемещении якоря. Они относятся к э/м преобразователям генераторного типа. В трансформаторных преобразователях отсутствует непосредственная электрическая связь между цепью питания и измерительной цепью. Существует связь лишь за счет магнитного поля, что позволяет выбором числа витков вых. обмотки получить любой уровень вых. напряжения.

| Трансформаторный преобразователь лин-ых перемещений
На рис. изображен трансформаторный преобразователь с подвижным сердечником. Обмотка  питается от источника переменного тока. питается от источника переменного тока.
|
Если магнитодвижущую силу  , т.е. ток
, т.е. ток  , поддерживать постоянной, то поток
, поддерживать постоянной, то поток  и индуцированная во вторичной обмотке ЭДС
и индуцированная во вторичной обмотке ЭДС  будут функциями длины воздушного зазора
будут функциями длины воздушного зазора  , связанной со значением силы
, связанной со значением силы  :
:
 .
.
Максимальная ЭДС получится при  , поскольку при этом магнитное сопротивление замкнутого магнитопровода минимально и по нему проходит максимальный магнитный поток . С увеличением уменьшаются магнитный поток и соответствующая ему ЭДС . Такой преобразователь исп-ся д/измерения малых линейных перемещений.
, поскольку при этом магнитное сопротивление замкнутого магнитопровода минимально и по нему проходит максимальный магнитный поток . С увеличением уменьшаются магнитный поток и соответствующая ему ЭДС . Такой преобразователь исп-ся д/измерения малых линейных перемещений.
Трансформаторные датчики часто используют с дифференциальной схемой включения обмоток. На рис. изображена схема дифференциально-трансформаторного датчика с общим сердечником 1 и подвижным якорем 2, перемещающимся в горизонтальном направлении.

| Статическая характеристика дифференциально-трансформаторного датчика показана на рис. б. |
Сердечник Ш-образной формы набирается из тонких листов электротехнической стали. На среднем сердечнике размещена первичная обмотка  , на двух крайних – вторичные обмотки
, на двух крайних – вторичные обмотки  , которые включены встречно. Первичная обмотка включается на напряжение переменного тока и создает магнитный поток . Этот поток проходит средний стержень и разветвляется в правый и левый сердечники пропорционально магнитным проводимостям зазоров под этими стержнями.
, которые включены встречно. Первичная обмотка включается на напряжение переменного тока и создает магнитный поток . Этот поток проходит средний стержень и разветвляется в правый и левый сердечники пропорционально магнитным проводимостям зазоров под этими стержнями.
Магн. проницаемость воздушного зазора пропорциональна площади зазора s и обратно пропорциональна его длине :  . При перемещении якоря в горизонтальном направлении изменяется не длина зазора, а его площадь s. При симметричном расположении якоря относительно сердечника магнитная проводимость зазора под левым стержнем сердечника (
. При перемещении якоря в горизонтальном направлении изменяется не длина зазора, а его площадь s. При симметричном расположении якоря относительно сердечника магнитная проводимость зазора под левым стержнем сердечника ( ) равна проводимости под правым стержнем (
) равна проводимости под правым стержнем ( ). Следовательно, одинаковы и магнитные потоки в стержнях, и соответственно их ЭДС во вторичных обмотках:
). Следовательно, одинаковы и магнитные потоки в стержнях, и соответственно их ЭДС во вторичных обмотках:  . Выходной сигнал датчика формируется в виде разности этих ЭДС, которая в данном случае равна 0. При смещении сердечника под одним стержнем площадь зазора и соответствующая магнитная проводимость возрастает, а под другим – уменьшается. Например, при перемещении якоря влево
. Выходной сигнал датчика формируется в виде разности этих ЭДС, которая в данном случае равна 0. При смещении сердечника под одним стержнем площадь зазора и соответствующая магнитная проводимость возрастает, а под другим – уменьшается. Например, при перемещении якоря влево  и через левый стержень проходит больший магнитный поток, чем через правый. Соответственно ЭДС вторичной обмотки на левом стержне становится больше ЭДС вторичной обмотки правого стержня:
и через левый стержень проходит больший магнитный поток, чем через правый. Соответственно ЭДС вторичной обмотки на левом стержне становится больше ЭДС вторичной обмотки правого стержня:  . Выходной сигнал датчика
. Выходной сигнал датчика  . При изменении направления смещения якоря относительно среднего положения фаза выходного сигнала меняется на
. При изменении направления смещения якоря относительно среднего положения фаза выходного сигнала меняется на  .
.
Дифференциально-трансформаторные датчики могут работать в широком диапазоне перемещений: от малых долей мм до десятков сантиметров. Они имеют высокую чувст-ть, точность и надежность.
Индуктивные датчики.

| Индуктивные датчики предназначены для обнаружения металлических объектов и распознавания их формы и размера. Рассмотрим на примере поперечного датчика приближения. Этот датчик применяется для измерения сравнительно небольших перемещений объектов из ферромагнитных материалов. |
Такой детектор определяет расстояние до объекта, оказывающего влияние на магн. поле в катушке. Индуктивность катушки измеряется при помощи внешней электронной схемы. Такие датчики явл-ся бесконтактными и обнаруживают только ферромагнитные объекты. Принцип действия такого преобразователя основан на явлении самоиндукции.

| Явление самоиндукции заключается в появлении ЭДС индукции в самом проводнике при изменении тока в нем. Примером явления самоиндукции является опыт с двумя лампочками, подключенными параллельно через ключ к ист-ку тока, одна из которых подключается ч/з катушку. |
При замыкании ключа лампочка 2, включенная ч/з катушку, загорается позже лампочки 1. Это происходит потому, что после замыкания ключа ток достигает максимального значения не сразу, магнитное поле нарастающего тока породит в катушке индукционную ЭДС, которая в соответствии с правилом Ленца будет мешать нарастанию тока. Д/самоиндукции выполняется установленный опытным путем закон: ЭДС самоиндукции прямо пропорциональна скорости изменения тока в проводнике ε=LΔI/t, где L – коэф. пропорциональности (индуктивность).
При отключении катушки индуктивности от источника тока лампа, включенная параллельно катушке, дает кратковременную вспышку. Ток в цепи возникает под действием ЭДС самоиндукции. Источником энергии, выделяющейся при этом в электрической цепи, является магнитное поле катушки. Энергия магнитного поля находится по формуле W1=LI2/2.
Применение: мониторинг транспортного потока, контроль безопасности, концевые выключатели станков, обнаружение и распознавание металлических объектов, в качестве счетчика импульсов в угловых измерительных системах.
Функционирование индуктивного бесконтактного выключателя:
1. Генератор создает э/м поле взаимодействия с объектом.
2. Триггер обеспечивает гистерезис при переключении и необходимую длительность фронтов сигнала управления.

| 3. Усилитель увеличивает амплитуду сигнала до необходимого значения. 4. Светодиодный индикатор показывает состояние выключателя, обеспечивает контроль работоспособности, оперативность настройки. |
5. Компаунд обеспечивает необходимую степень защиты от проникновения твердых частиц и воды.
6. Корпус обеспечивает монтаж выключателя, защищает от механических воздействий. Выполняется из латуни или полиамида, комплектуется метизными изделиями.
При подаче напряжения питания перед активной поверхностью индуктивного выключателя образуется переменное магнитное поле, создаваемое катушкой индуктивности генератора. При попадании объекта воздействия в зону чувств-ти выключателя, снижается добротность колебательного контура и амплитуда колебаний, что вызывает срабатывание триггера и изменение состояния выхода выкл-ля.
Э/м инду́кция – явление возникновения ЭДС в проводнике, находящемся в изменяющемся магнитном поле или благодаря движению проводника относительно постоянного магнитного поля.(1831 М. Фарадей)
Согласно закону электромагнитной индукции Фарадея:

где  - ЭДС, действующая вдоль произвольно выбранного контура; ΦB – магнитный поток через поверхность, натянутую на этот контур; t – время.
- ЭДС, действующая вдоль произвольно выбранного контура; ΦB – магнитный поток через поверхность, натянутую на этот контур; t – время.
Знак «минус» в формуле отражает правило Ленца, названное так по имени русского физика Э.Х.Ленца: индукционный ток, возникающий в замкнутом проводящем контуре, имеет такое направление, что создаваемое им магнитное поле противодействует тому изменению магнитного потока, которым был вызван данный ток.

| Иллюстрация возникновения индукционной ЭДС в движущейся проводящей рамке рис.Эффект используется в электромагнитных преобразователях кинетической энергии поступательного или вращательного движений в электрическую энергию, трансформаторах, дросселях, генераторах, датчиках движения, микрофонах. |
Вихретоковые датчики. На рис. А показан э/м датчик приближения, состоящий из 21 катушек, использующий вихревые токид/детектирования приближения объектов из немагнитных, но проводящих материалов. Одна из катушек является эталонной, а другая – чувствительной, реагирующей на вихревые токи, индуцируемые в проводящем объекте. Вихревые токи формируют магнитное поле, направленное навстречу полю чувствительной катушки, приводящее к разбалансу между двумя катушками. Чем ближе объект придвигается к катушке, тем больше изменяется магнитное сопротивление.

| Толщина слоя, в котором циркулируют вихревые токи, определяется следующим выражением:
 где f – частота,
σ – удельная проводимость объекта
где f – частота,
σ – удельная проводимость объекта
|
Для эффективной работы датчика толщина объекта должна быть больше величины δ. Очевидно, что вихретоковые детекторы не следует применять для работы с металлизированными пленками и фольгой. Обычно зависимость между импедансом катушки и расстоянием до объекта х является нелинейной и температурочувствительной. Диапазон рабочих частот вихретоковых детекторов лежит в диапазоне от 50 кГц до 10 МГц.
На рисунке (Б) и (В) показаны две конфигурации вихретоковых датчиков: с экранированием и без. В состав экранированного датчика входит металлический кожух вокруг ферритового сердечника и катушек. Он фокусирует электромагнитное поле на переднюю часть датчика. Это позволяет встраивать датчики такого типа в металлические структуры без изменения диапазона измерений. Неэкранированный датчик обладает чувствительностью к перемещению не только с переднего конца, но и с боковых сторон. Поэтому диапазон измерения неэкранированного датчика несколько выше, чем у экранированного точно такого же диаметра. Для корректной работы в окружении неэкранированного датчика не должно быть металлических объектов.
Достоинством вихретоковых датчиков является отсутствие механической связи с объектом, поэтому нагрузка практически никак не влияет на их работу. Кроме этого, вихретоковые датчики могут не только определять положение объектов, но также измерять толщину материалов, толщину непроводящих покрытий, удельную проводимость и дефекты в изделиях. Дефектоскопия – наиболее популярная область применения датчиков данного типа. В некоторых случаях используются не две, а большее число катушек: одна часть из них имеет маленький диаметр (2-3 мм), а другая – большой (25 мм). Такие датчики примен-ся д/измерения уровней расплавленных металлов и др. проводящих жидкостей.
На рис. показано, как искажается магнитное поле катушки при приближении проводящей пластины.

| Присутствие вблизи витка с переменным током проводящей среды приводит к изменению его первоначального поля и электрических параметров витка, т.е. его активного и реактивного сопротивления: активное сопротивление витка увеличивается за счет роста потерь в проводящей среде, а индуктивное сопротивление уменьшается. |
4. Волоконно-оптические датчики
При изготовлении измерительных преобразователей практический интерес представляет зависимость амплитуды и фазы сигнала от измеряемого параметра.
Классификация основных структур волоконно-оптических датчиков:
 с изменением хар-ик волокна (в том числе специальных волокон)
с изменением хар-ик волокна (в том числе специальных волокон)
|  с изменением пар-ров передаваемого света
с изменением пар-ров передаваемого света
|  с чувствительным элементом на торце волокна
с чувствительным элементом на торце волокна
|
В волоконно-оптических датчиках оптическое волокно м.б. применено просто в качестве линии передачи, а может играть роль самого чувствительного элемента датчика.
Волоконно-оптические датчики, в которых оптическое волокно служит линией для распространения света, можно разделить на датчики с оптическим преобразователем и датчики с оптическим зондом.
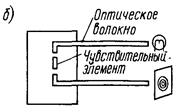
Датчики с оптическим преобразователем представляют собой систему, содержащую какой-либо оптический мат-ал или чувств-ый к механ-му воздействию оптический элемент, преобразующие изменение параметров внешней среды в изменение параметров светового луча. Преобразователь помещен м/д торцами передающего и приемного оптического волокна. Датчики этой системы обычно просты по конструкции и высоконадежны.
В датчиках с зондом из оптического волокна световая инф-ия, излучаемая, отраженная или рассеянная объектом измерения, выделяется с помощью сенсорной головки, состоящей из соответствующего объектива и оптического волокна, и поступает в световой детектор. В кач-ве источника света в зависимости от типа датчика применяется лазер или светодиод. Волоконно-оптические датчики этого типа отличаются высокой чувств-ью и обычно примен-ся в обл-ти бесконтактных измер-ий.

| В качестве примера – структурная схема температурного датчика. П/п кристалл зажат между приемным и передающим оптическими волокнами. |
Если на этот кристалл будет падать луч от источника света, имеющего спектр излучения в окрестности указанной границы спектра поглощения, то интенсивность света, проходящего ч/з светочувствительную часть датчика, с повышением температуры будет падать. Т.о., по вых. сигналу детектора можно измерять темп-ру. Подобный датчик нашел применение д/измерения температуры проводов линии электропередачи и темп-ры обмотки высоковольтного трансформатора в рабочем режиме.
Датчики с оптическим волокном в качестве чувствительного элемента. Для работы волоконно-оптического чувствительного элемента датчика можно использовать изменение фазы распространяющейся по оптическому волокну волны, поляризации, угла вращения плоскости поляризации, изменение потерь, явление рассеяния света под воздействием внешних факторов.
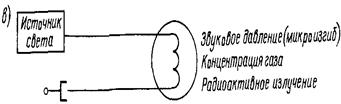
Обобщенные схемы и объекты датчиков с волоконно-оптическим чувствительным элементом, работающим на основе:
 изменения фазы
изменения фазы
|  вращения плоскости поляризации
вращения плоскости поляризации
|
 изменения потерь
изменения потерь
|  рассеяния
рассеяния
|
На рис. а представлена схема интерферометра с оптическим трактом, реализованным на одномодовом волокне либо на волокне с сохранением поляризации. Наиболее типичными измеряемыми величинами являются температура, длина, давление. В соответствии с их колебаниями изменяется длина и коэффициент преломления оптического волокна, а в результате изменяется и фаза распространяющегося в нем света.
На рис. б представлена схема датчика, в котором используется вращение плоскости поляризации. По сути он соответствует измерителю тока или напряженности магнитного поля на эффекте Фарадея.
Показанный на рис. в чувствительный элемент на основе изменения потерь исследуется с точки зрения применения его в датчике давления, концентрации газа и радиоактивного излучения.
На рис. г представлена схема датчика распределения, измеряющего коэффициент отражения методом наблюдения за формой отраженного сигнала. Этот метод был разработан с целью обнаружения мест разрыва оптического волокна в линии связи и определения потерь вдоль оптического волокна. Он предусматривает измерение очень слабого света обратного рэлеевского рассеяния в системе с высоким отношением сигнал-шум. В последнее время исследуются структуры датчиков, работающих на этом принципе, для измерения распределения таких величин, как температура, давление и др.
Применение. Говоря о преимуществах волоконно-оптических датчиков, необходимо отметить, что с их появлением расширились возможности измерений, а также повысилось их качество.
Энергетика. На основе таких датчиков (лучеводов изображения) созданы системы наблюдения внутри топок тепловых электростанций, устройства для измерения температуры проводов линий передачи и внутри трансформаторов, для контроля за количеством масла в масло-наполненном кабеле, измерители скорости ветра и определители его направления в системах наблюдения за атмосферными явлениями.
Промышленность. В цветной и черной металлургии нашли применение лазерные доплеровские измерители скорости, лучевые термометры, лучеводы изображения, сканирующие дефектоскопы поверхности металла и т.д. В нефтеперерабатывающей промышленности используются волоконно-оптические датчики утечки. В машиностроении нашли применение такие датчики, как фотопрерыватели, кодеры, измерители смещения на основе многожильного волоконно-оптического кабеля, инерционные измерители ускорения и т. д.
Исследования, связанные с применением волоконно-оптических датчиков для измерения перемещения, акустического давления, магнитных полей, ускорений, деформаций, начались с конца 70-х г.
В волоконно-оптических датчиках используется 2 осн-ых принципа: модуляция амплитуды (интенсивности); модуляция фазы светового потока
Основное применение таких датчиков является невосприимчивость к электрическим шумам и воздействию окружающей среды, высокой чувствительностью и стабильностью с течением долгого времени.
Модуляция интенсивности
 |
Модуляция фазы
  |
Оптоэлектрические ПИП
Обобщенная структурная схема оптоэлектрического преобразователя.

| 
|
В структурную схему входит источник излучения, оптический канал, приемник излучения и измерительная цепь. Измеряемая величина X воздействует непосредственно на источник излучения, изменяя параметры излучаемого потока Ф1 или на оптический канал, модулируя соответствующий параметр потока в процессе распространения излучения. Чаще всего под действием измеряемой величины изменяется интенсивность лучистого потока, например вследствие изменения температуры излучателя, пропускания, поглощения или рассеяния оптического канала, однако могут изменяться также фазовый сдвиг между электромагнитными колебаниями в двух лучах, вызываемый разностью оптического хода этих лучей, и частота и длина волны излучения, генерируемого источником.
По структурным схемам оптоэлектронные преобразователи могут быть разделены на: оптоэлектронный преобразователь интенсивности излучения; оптоэлектронный преобразователь фазового сдвига; оптоэлектронный преобразователь частоты волны.

| 
|
Оптоэлектронный преобразователь фазового сдвига состоит из генератора Г1 гармонических колебания, п/п лазера Г, фотоприемника ФП и фазометра. Излучение лазера Г, модулированное по амплитуде, распространяется до уголкового отражателя УО, установленного на расстоянии Dx от дальномера. Отраженное излучение возвращается к фотоприемнику ФП. Порог чувствительности Dxmin = 4 мм.
Оптоэлектронный преобразователь частоты волны. Устройства с интерференционным преобразованием частоты строятся на базе интерферометров с использованием модуляции излучения по частоте. Принцип действия интерферометра: пучок света с помощью того или иного устройства пространственно разделяется на два или большее количество когерентных пучков. Каждый из пучков проходит различные оптические пути и возвращается на экран, создавая интерференционную картину, по которой можно установить смещение фаз пучков.
Возможность изменения свойств оптического канала при различных внешних воздействиях на него позволяет создать целую серию оптоэлектронных датчиков (датчики влажности и загазованности, датчика наличия в объеме той или иной жидкости и т.д.).
Структура оптоэлектрических преобразователей интенсивности излучения.
В этих преобразователях используются три алгоритма работы:
а) измерение потока Фх;
б) измерение отношения потоков Ф1/Ф2 где в качестве одного из потоков обычно используется образцовый (эталонный) поток Фэ;
в) измерение разности потоков Ф1— Ф2, где Ф1 = Фх, Ф2 = Фэ
Измерение отношения потоков.

| Выходное напряжение усилителя  пропорционально отношению проводимостей двух фоторезисторов дифференциального преобразователя. пропорционально отношению проводимостей двух фоторезисторов дифференциального преобразователя.
|
При использовании одинарного преобразователя и замене фоторезистора 2 резистором R0 напряжение  , пропорционально изменению проводимости фоторезистора 1; при замене фоторезистора 1 резистором R0 напряжение
, пропорционально изменению проводимости фоторезистора 1; при замене фоторезистора 1 резистором R0 напряжение  , пропорционально изменению сопротивления фоторезистора 2.
, пропорционально изменению сопротивления фоторезистора 2.
Измерение разности потоков.

В фотодиодном режиме фотодиод может рассматриваться как резистор и включается в схемы делителей (рис. а)или мостовые измерительные цепи (рис. б ) фотодиод по напряжению питания хорошо согласуются с полупроводниковыми электронными элементами, поэтому используются обычно в схемах совместно с операционными усилителями. На (рис. в) показана схема включения фотодиода, работающего в фотогенераторном режиме. Благодаря тому, что входное сопротивление усилителя  н е превышает 10 Ом фотодиод работает в режиме, близком к короткому замыканиюи обладает достаточно лин-ой хар-кой.
н е превышает 10 Ом фотодиод работает в режиме, близком к короткому замыканиюи обладает достаточно лин-ой хар-кой.
Особенность оптоэлектрических преобразователей заключается в том, что при современной технологии изготовления фотоприемников трудно подобрать пару фотоприемников, обладающих совершенно идентичными характеристиками не только при начальных условиях, но и под действием всех влияющих факторов. Неидентичность характеристик, как известно, сводит на нет преимущества дифференциального и логометрического включений преобразователей, позволяющих существенно повысить точность измерения при использовании преобразователей с идентичными характеристиками. Для того чтобы избежать этого недостатка, в оптоэлектрических преобразователях используются структуры с одним фотоприемником и временным разделением поступающих в него потоков.
Электростатические ПИП

| Принцип действия. Электростатический (ЭС) преобразователь представляет собой два или несколько тел, между которыми действует электрическое поле. |
Простейший ЭС преобразователь содержит два электрода площадью S, параллельно расположенных на расстоянии δ в среде с диэлектрической проницаемостью ε (конденсатор переменной емкости). С электрической стороны преобразователь характеризуется напряжением U, зарядом q = CU (где С – емкость (для плоскопараллельного расположения пластин С=εS/δ)), током i=dq/dt, энергией электрического поля Wэл = q U/2 = CU2 2.
Если одна из пластин (или диэлектрик) имеет возможность перемещаться, то с механ-ой стороны преобразователь характеризуется перемещением х, скоростью υ=dx/dt и электростатической силой притяжения между пластинами fэл = dWэл dx.
Емкости большинства преобразователей составляют 10-100 пФ, и поэтому даже на высоких частотах их выходное сопротивление велико (103 - 107 Ом), а выходная мощность настолько мала, что емкостные преобразователи работают только с усилителем с высоким входным сопротивлением и, чтобы избежать наводок, соединяются с ним экранированным проводом или коаксиальным кабелем.
При постоянной емкости ЭС преобразователь работает как мера емкости или как элемент электрической цепи с реактивной проводимостью, пропорциональной частоте: если
и = Um sinωt, то i = ω C U m cosωt (рис. а)
При емкости, принудительно изменяемой по известному закону, например, С = С 0+ ΔCsinΩt, ЭС преобразователь работает в емкостных модуляторах и измерителях поверхностных зарядов (а также в ЭС генераторах) (рис. б). Например, ЭС преобразователь емкостного модулятора («динамический конденсатор») в зависимости от постоянной времени RC- цепи может работать в режиме заданного заряда при  (рис. а) и заданного напряжения при
(рис. а) и заданного напряжения при  (рис. б). В первом случае
(рис. б). В первом случае  ;
;  , т. е. выходной величиной является переменная составляющая напряжения Uc (или UR). Во втором случае
, т. е. выходной величиной является переменная составляющая напряжения Uc (или UR). Во втором случае  ;
;  ;
;  , т.е. выходной величиной модулятора, пропорциональной постоянному напряжению Ux, является ток.
, т.е. выходной величиной модулятора, пропорциональной постоянному напряжению Ux, является ток.
При емкости, изменяющейся в зависимости от измеряемой неэлектрической величины, ЭС преобразователь (емкостной преобразователь) работает в различных датчиках прямого преобраз-ия, а также как преобразователь неравновесия в датчиках уравновешивания. Величина емкости зависит от механ-го перемещения, изменяющего зазор δ или площадь S, температуры и состава диэлектрика, влияющих на ε, и т.д. При этом ЭС преобразователь может работать либо на постоянном токе (в режиме заданного напряжения или заданного заряда), либо на переменном токе (на несущей частоте).
Например, если δ=δ 0 +х, то С=εS /(δ 0 +х), и при работе на постоянном токе в режиме заданного заряда (при условии, что переменная х меняется с такой круговой частотой Ω, что ΩRC >>1), напряжение Uc = q/C = q( δ 0+x)/( ε S) содержит составляющую, пропорциональную х.
При работе в режиме заданного напряжения заряд q =ε SU/( δ+ x). Если х<<δ0, то приближенно  и
и  , т.е. ЭС преобраз-ль может служить д/измерения скорости υ = dx/dt относительного движения.
, т.е. ЭС преобраз-ль может служить д/измерения скорости υ = dx/dt относительного движения.
При работе на несущей частоте ЭС преобразователь питается напряжением U=Umsinωt, круговая частота ω которого должна значительно превышать наибольшую частоту Ω изменения емкости под действием измеряемой величины. Пусть, например, С=С0+ΔCsinωt. Тогда
i=d (CU)/dt=CdU/dt+UdC/dt=Um(ωC0cosωt+ωΔCcosωtsinωt+ΩΔCsinωtcosωt). Первый член в скобках выражает несущее колебание постоянной амплитуды, второй – составляющую тока, меняющуюся пропорционально изменению емкости, однако третий член нарушает эту пропорциональность. Для уменьшения относительного размера третьего члена нужно увеличивать отношение ω / Ω.
При работе ЭС преобразователей на постоянном токе нужно учитывать существующую между электродами контактную разность потенциалов (КРП) ек, включаемую последовательно с емкостью. КРП зависит от природы материалов, свойств и чистоты поверхности и существует даже между электродами, выполненными из одного и того же материала. Так, между электродами, выполненными из алюминия высокой чистоты, КРП может достигать 1В. Лишь применение специальных мер позволяет снизить КРП до величины порядка 10-20 мВ.
Область применения. При емкости, изменяющейся под действием силы электростатического притяжения, ЭС преобразователь работает в измерительных механизмах ЭС вольтметров и в датчиках уравновешивания в качестве обратного преобразователя. При измерении неэлектрических величин (перемещения), сила fэ обычно считается вредным эффектом, поскольку она является реакцией прибора на объект измерения, однако такое воздействие гораздо меньше, чем в других преобразователях, например в индуктивных.
Емкостные преобразователи. Конструкции преобразователей. На рис. а показано устройство емкостного преобразователя для измерения уровня.

| 
| Преобраз-ль состоит из 2 параллельно соединенных конденсаторов: конденсатор С1 образован частью электродов и диэлектриком – жидкостью, уровень которой измеряется, конденсатор С 0 – остальной частью электродов и диэлектриком – воздухом. |
Емкость преобразователя
 ,
,
где l 0 – полная длина цилиндра; l – длина, на которую цилиндр заполнен жидкостью; ε – диэлектрическая проницаемость жидкости; R1 и R2 – радиусы внешнего и внутреннего цилиндров.
На рис. б показан принцип устройства емкостного преобразователя для измерения толщины ленты из диэлектрика. Испытуемая лента 1 протягивается с помощью роликов 2 между обкладками 3 конденсатора. Если длину зазора между обкладками конденсатора обозначить δ, площадь обкладок S, толщину ленты δД и ее диэлектрическую проницаемость εд, то емкость С можно выразить как
  
| На рис. а показан принцип устройства емкостных преобраз-лей с переменной площадью пластин, используемых для измерения угла поворота вала. |
Ротор 1, жестко скрепленный с валом 2, перемещается относительно статора 3 так, что длина зазора между ними сохраняется неизменной. Емкость преобразователя при повороте ротора изменяется от максимума (выступ ротора находится против выступа статора) до минимума, как показано на рис. б. Достоинством емкостных преобразователей с переменной площадью пластин (рис. в)является возможность соответствующим выбором формы подвижной 1 и неподвижной 2 пластин получить заданную функциональную зависимость между изменением емкости и входным угловым или линейным перемещением. Преобразователи с переменной площадью применяются для измерения перемещений, больших 1 мм.

| Д/измерения малых перемещений (10-6 - 10-3 м) получили применение преобразователи с переменным зазором. Обкладка 2 закреплена на пружинах и перемещается поступательно под воздействием измеряемой силы F. Обкладки 1 и З неподвижны. |
Емкость между обкладками 2 и 3 увеличивается, а между обкладками 1 и 2 уменьшается.
Емкостные преобразователи с переменным зазором для измерения малых перемещений отличаются высокой чувствительностью (до 500 В/мм), линейностью зависимости сопротивления от зазора  , малыми погрешностями и простотой конструкции, что в ряде случаев делает их незаменимыми.
, малыми погрешностями и простотой конструкции, что в ряде случаев делает их незаменимыми.
7. Датчики перемещения на основе эффекта Холла

| Эффектом Холла называется появление в проводнике с током плотностью j, помещенном в магнитное поле Н, электрического поля Ех, перпендикулярного Н и j. |
При этом напряжённость электрического поля, называемого ещё полем Холла, равна Ex=RHjsina, где a угол между векторами Н и J (a<180°). Когда H^j, то величина поля Холла Ех максимальна: Ex=RHj. Величина R (коэффициент Холла) является основной характеристикой эффекта Холла.
Простейшая теория эффекта Холла объясняет появление ЭДС Холла взаимодействием носителей тока (электронов проводимости и дырок) с магнитным полем. Под действием эл. поля носители заряда приобретают направленное движение (дрейф), средняя скорость которого (дрейфовая) vдр¹0. Плотность тока в проводнике j=n*evдр, где n – концентрация числа носителей, е – их заряд. При наложении магн. поля на носители действует сила Лоренца: F=e[Hvдp], под действием которой частицы отклоняются в направлении, перпендикулярном vдр и Н. В результате в обеих гранях проводника конечных размеров происходит накопление заряда и возникает электростатическое поле – поле Холла. В свою очередь поле Холла действует на заряды и уравновешивает силу Лоренца. В условиях равновесия eEx=еНvдр, Ex=1/neHj, отсюда R=1/ne (cмз/кулон). Знак R совпадает со знаком носителей тока. Д/металлов, у которых концентрация носителей (электронов проводимости) близка к плотности атомов (n»1022См-3), R~10-3(см3/кулон), у п/п концентрация носителей значительно меньше и R~105 (см3/кулон). Коэффициент Холла R может быть выражен ч/ез подвижность носителей заряда m=еt/m* и удельную электропроводность s=j/E=еnvлр/Е: R=m/s.
Здесь m* - эффективная масса носителей, t - среднее время между двумя последовательными соударениями с рассеивающими центрами.
В ферромагнетиках на электроны проводимости действует не только внешнее, но и внутреннее магн. поле: В=Н+4pМ. Это приводит к особому ферромагнитному эффекту Холла. Экспериментально обнаружено, Ex=(RB+RаM)j, где R – обыкновенный, a Ra – необыкновенный (аномальный) коэф. Холла. Между Ra и удельным электросопротивлением ферромагнетиков установлена корреляция.
Эффект Холла иногда позволяет опред-ть тип носителей заряда в met или п/п, что делает его незаменимым методом исследования св-в п/пв.
На основе эффекта Холла работают датчики Холла: приборы, измеряющие напряжённость магнитного поля.

