




Методичні вказівки
з навчальної дисципліни
«Пілотажно-навігаційне обладнання ПС».
Для курсантів денної та заочної форми навчання
Спеціальності:
5.05110302 «Експлуатація авіаційних електрифікованих комплексів».
Кривий Ріг 2015р.
Методичні вказівки щодо виконання курсової роботи з дисципліни «Пілотажно-навігаційне обладнання ПС».
Для курсантів денної та заочної форм навчання за спеціальністю 5.05110302, «Експлуатація авіаційних електрифікованих комплексів».
Укладач: викл. Стадник В.В.
Методичні вказівки обговорено на засіданні циклової комісії: Погоджую
«Авіаційних приладів та електроустаткування». Завідувач
навчально-методичним кабінетом
Протокол № _____________ _______________
Від ______ ___2015р. ____________ 2015р
Голова циклової комісії
______ __________
1. Загальні методичні вказівки.
Курсова робота відноситься до заключної стадії вивчення предмету «Пілотажно-навігаційне обладнання ПС» і ставить за мету поглиблену підготовку до державної атестації студентів.
При виконанню курсової роботи студент повинен в підсумку має розуміти зв'язок між пілотажно-навігаційними параметрами і технічною реалізацією обладнання, що працює з цими параметрами.
Питання завдань варіантів однотипні і мають 3 напрями діяльності при відповідях:
- теоретичний, що розкриває знання студента по пілотажно-навігаційним параметрам;
- практичний, що розкриває знання студента по побудові і функціонуванню навігаційного комплексу;
- практичний, що розкриває знання студента по побудові і функціонуванню пілотажного комплексу;
Робота над курсовою роботою дає студенту змогу:
- розвити уміння застосовувати теоретичні і практичні знання з загальноосвітніх та спеціальних дисциплін при вивченні систем повітряного судна, а також при вирішенні інженерних задач;
- закріпити знання з дисципліни «Пілотажно-навігаційне обладнання повітряних суден»;
- закріпити знання і навички по використанню експлуатаційної документації.
Завдання №1. Його виконання можливе при засвоєнні навчального матеріалу викладеному відповідно рис. 1.
Рис.1. Основні навігаційні напрями.
 о - ортодромічний курс, це кут між північним напрямом ортодромічного меридіану РПО та проекцією повздовжньої вісі літака на площину горизонту; ψІ - істинний курс, це кут між північним напрямом географічного меридіану РПІ та проекцією повздовжньої вісі літака на площину горизонту; ψМ - магнітний курс, це кут між північним напрямком магнітного меридіану РПМ та проекцією повздовжньої вісі літака на площину горизонту; ППМ- початковий пункт маршруту; ККР - курсовий кут радіостанції, це кут між продовжною віссю літака та напрямом на радіостанцію; АРМІ – азимут радіомаяка істинний, це кут між північним напрямом істинного меридіану що проходить через літак і напрямом на радіостанцію; АЛІ - азимут літака істинний;
о - ортодромічний курс, це кут між північним напрямом ортодромічного меридіану РПО та проекцією повздовжньої вісі літака на площину горизонту; ψІ - істинний курс, це кут між північним напрямом географічного меридіану РПІ та проекцією повздовжньої вісі літака на площину горизонту; ψМ - магнітний курс, це кут між північним напрямком магнітного меридіану РПМ та проекцією повздовжньої вісі літака на площину горизонту; ППМ- початковий пункт маршруту; ККР - курсовий кут радіостанції, це кут між продовжною віссю літака та напрямом на радіостанцію; АРМІ – азимут радіомаяка істинний, це кут між північним напрямом істинного меридіану що проходить через літак і напрямом на радіостанцію; АЛІ - азимут літака істинний;  - кут сходження меридіанів; М магнітне схилення; КПМ - кінцевий пункт маршруту; КВ – кут вітру; δн – навігаційний напрям вітру; КЗ – кут знесення; V – повітряна швидкість; U – швидкість вітру; W – шляхова швидкість.
- кут сходження меридіанів; М магнітне схилення; КПМ - кінцевий пункт маршруту; КВ – кут вітру; δн – навігаційний напрям вітру; КЗ – кут знесення; V – повітряна швидкість; U – швидкість вітру; W – шляхова швидкість.
Всі кути напрямів відраховуються у градусах за годинниковою стрілкою. Головні співвідношення при навігаційних розрахунках визначаються за формулами:
ψМ =ψК ±ΔК; ψІ =ψМ +(±ΔМ); ψІ =ψК + (±ΔК) +(±ΔМ); ЗМШК = ЗИШК + ( );
);
АРММ =ψМ +КУР; АЛМ =  АСМ ± 180°.
АСМ ± 180°.
В завданні розрахунки повинні вестись не на основі формул, а на основі рисунка з відповідними умовами, наприклад:
Дано: Ψм= 40○; ККР=20○; ΔМ= 5○. Визначити азимут літака істинний (Алі). Навести означення параметрів.
Як видно з рисунка Алі = 65º.
Далі по умові завдання.
Завдання №2. Його виконання можливе при засвоєнні навчального матеріалу викладеному відповідно рис. 2.
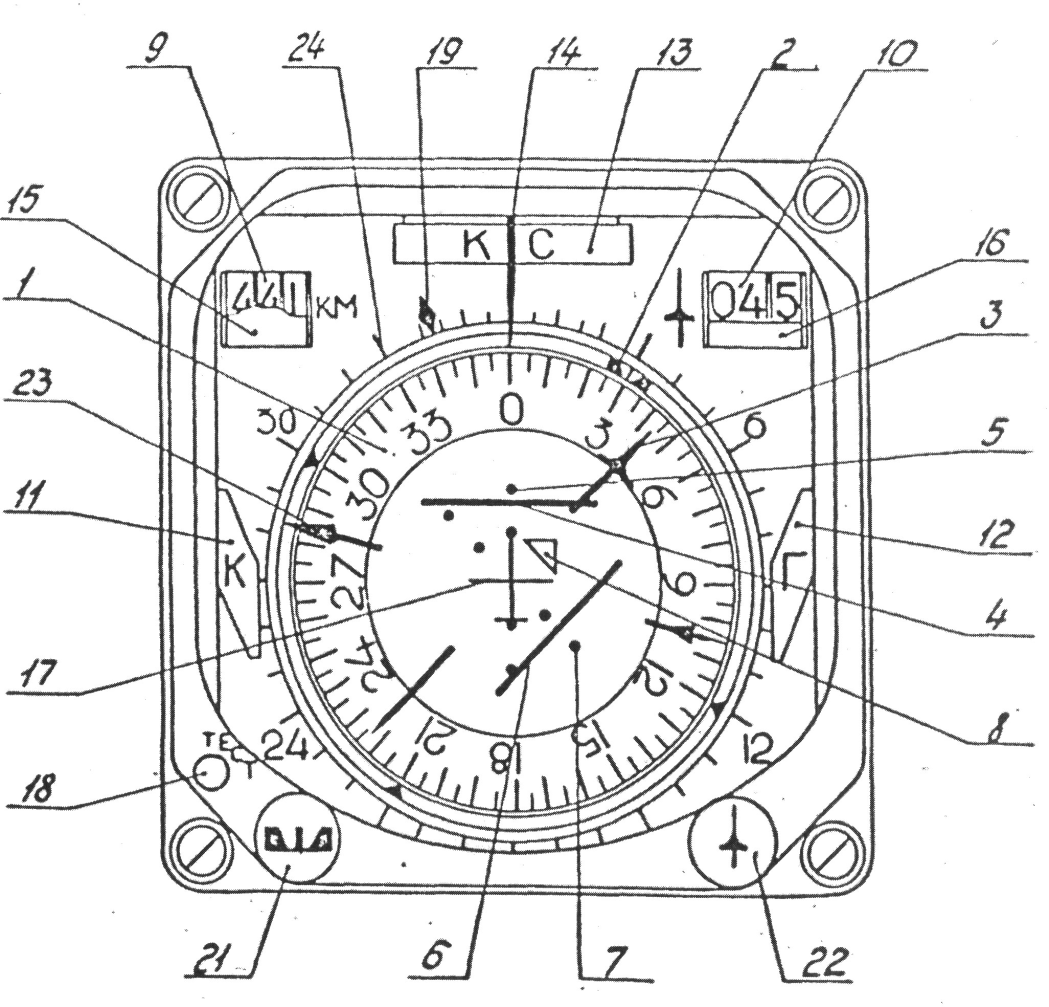
Рис.2. Лицева панель ПНП-72.
1-шкала поточного курсу; 2-індекс заданого курсу; 3-стрілка заданого шляхового кута; 4-стрілка (планка) відхилення від траєкторії заходу на посадку (рівно сигнальної зони глісади); 5-шкала вказівника відхилення від траєкторії заходу на посадку; 6-стрілка (планка) вказівника відхилення від траєкторії заходу на посадку (рівно сигнальної зони курсу); 7- шкала вказівника відхилення від траєкторії заходу на посадку; 8-індекс польоту «на маяк» (висвічується); 9-лічильник далекості до маяка; 10-лічильник заданого шляхового кута; 11-прапорець (бленкер) сигналізації відмови бокового каналу радіотехнічної системи заходу на посадку; 12- прапорець (бленкер) сигналізації відмови повздовжнього каналу радіотехнічної системи заходу на посадку;13- прапорець (бленкер) сигналізації відмови курсової системи; 14-нерухомий індекс відліку поточного курсу; 15,16-прапорці сигналізації відмови лічильників; 17-силует літака; 18-кнопка тестової перевірки слідкуючих систем приладу; 19-інекс кута зносу; 21-кремальєра вводу заданого курсу; 22-кремальєра вводу заданого шляхового кута; 23-стрілка індикації кутового кута радіостанції або азимуту (по шкалі курсу); 24-шкала курсових кутів радіостанції.
В завданні відобразити лицеву панель ПНП-72 відповідно умов, наприклад:
Відобразити лицеву панель ПНП-72 з вибірковою індикацією: ЗПУ дорівнює 90º, РЗГ – внизу. Дати означення використаних параметрів.
Відповідь на завдання має бути в вигляді рис. наведеному нижче, а далі по умові завдання.
Завдання №3. а). Відносно курсової системи. Його виконання можливе при засвоєнні навчального матеріалу викладеному нижче. Електрофункціональна схема каналу КС типу БСФК-1 наведена на рис.3, а блок схема КС наведена на рис.4. Електрофункціональна схема каналу БСФК-1 розглядалась в предметі.
Тому щоб виконати завдання, необхідно уважно проробити матеріал, що відноситься до блок-схеми курсової системи і скласти блок-схему відповідно питання завдання.

Рис.3. Електрофункціональна схема каналу БСФК-1
Рис.4. Блок схема каналу КС типу БСФК-1
Використані на рис. скорочення: АГ-авіагоризонт; ГВ-гіровертикаль; ГПК-гіронапівкомпас;
ГА-гіроагрегат; БСК-блок узгодження курсу; ПУ-пульт управління; СКС-система кренової стабілізації (в БСФК-1 відсутня); КГ-курсовий гіроскоп; СГК-система горизонтальної корекції; СУДГ-система зменшення дрейфу гіроскопу; БГМК-блок гіромагнітного курсу; ИД-индукційний датчик; ВК-вимикач корекції; ЗК-заданий курс; КК-компасний курс; МК-магнітний курс; ГМК-гиромагнітній курс; ОК-ортодромічний курс; ШК-широтна корекція; ПОТР.-спроживачі.
Основним вузлом каналу є ГПК(ГА), який складається з:
-курсового гіроскопа (КГ), тобто трьохстепеневого гіроскопа з горизонтальною головною віссю;
-системи горизонтальної корекції(СГК), яка складається з маятникового датчика, корекційного мотора на вісі Z-Z гіроскопа (В1,М2 на електрофункціональній схемі курсової системі БСФК-1);
-вузол узгодження і видачі курсу (УСиВК), який складається з сінусно-косинусного трансформатора (СКТ) звязаного с вісью Z-Z гіроскопа, електродвигуна з редуктором, який забезпечує поворот статора СКТ (В1,М2 на електрофункціональній схемі курсової системи БСФК-1);
- системи кренової стабілізації (СКС), яка складється з СКТ-приймача, двигуна відпрацювання. В БСФК-1 не використовується.
- системи зменшення дрейфу гироскопу. В БСФК-1 на вісі У-У гіроскопу встановлюється електродвигун (на електрофункціональній схемі М3), який є вихідною ланкою системи.
В якості зовнішніх коректорів використовується індукційний датчик (компас) ИД, або БЦОМ (обчислювач зовнішньої корекції), якщо він є на борту.
Режимами работи курсової системи є:
- «ГПК»-гиронапівкомпаса;
- «МК»-магнітної корекції;
- «ВК»- зовнішньої корекції (при наявності на борту ЦОМ).
Режими включаються з пульта управління.
Основний режим «ГПК», тривалий. В цьому режимі в КС проходить формування для споживачів і індикації сигналів гіромагнітного курсу (ψгмк) та сигналів ортодромічного курсу (ψо), фізично таким чином:
ИД вимірює компасный курс (ψк), який слідкуючою системою передаеться в БГМК і за допомогою компенсатора девіації перетворюється в магнітний курс (ψм). Магнітний курс за допомогою також слідкуючої системи передается на споживачі. Нормальна швидкість передачі знаходится в межах 5º/мин за рахунок великого коефіцієнта редукції. Тому, якщо сигнали з ИД коливаються знакоперемінно, то двигун слідкуючої системи не встигає їх відпрацювати і на споживачі вони не пройдуть. Для прискорення процесу видачи сигналів на споживачі в момент включення КС на ПУ використовується кнопка «Согласование», що приводить до збільшення швидкості видачі сигналів на споживачі.
Сигнал гіроскопичного курсу (ψг) з ГА перед використанням КС приводиться до нульового значення. При початковому виставленні КС (прив'язка, наприклад, до меридіану), на ПУ використовується задатчик курсу, що приводить до формування в БСК значення потрібного курсу на споживачі. З врахуванням вводу сигналу широтної корекції Ωзsinφ, ψг перетворюється в ψгпк (гиронапівкомпасний курс), а при прив'язуванні до меридіану - в ψо. При відхиленні ПС від значення ортодромічного курсу, за рахунок курсового гироскопу фіксується відхилення, а швидкість передачі сигналу відхилення через слідкуючі системи БСК має розмірність º/сек.
Однчасно сигнали гиронавівкомпасного курсу поступають в БГМК і при відхиленні ПС по курсу, на споживачах магнітного курсу сигнал відхилення формується не за рахунок зміни сигналів з ИД, а за рахунок КГ. Тому, вводиться поняття гіромагнітного курсу ψгмк. 
Режим «МК», короткочасний. Використовується для перевірки точності работи каналу ортодромічного курсу. Фізична сутність режиму «МК», є в наступному:
- якщо в поточне значення магнитного курсу ввести кут сходження меридіанів (σ) вихідного пункту маршруту (ИПМ) і поточного пункту маршрута, а магнітний меридіан ИПМ був прийнятий за базовый, то тим самим буде перехід поточного магнітного курсу в ортодромічний.
σ вводиться з ПУ, а БГМК в цьому режимі переключається на споживачі ортодромічного курсу через БСК. Таким чином, якщо в результаті вказаних дій, значення ψо на споживачах не зміниться, то це значить канал ортодромічного курсу працює з потрібною точністю і не потрібна корекція положення ПС.
Приклад виконання завдання. Скласти блок-схему БСФК в режимі «Настройка», пояснити принцип роботи.
Блок – схема в режимі «Настройка», наведена нижче на рис.
Сутність режиму складається в тому, що сигнали з обертового трансформатора (ВТ) В1 гіроагрегату
ГА-8, обнуляються. В1 є джерелом сигналів курсу, який формується за допомогою гіроскопу Умовно позначається ψг- гіроскопічний курс.
Режим включает встановленням на ПУ-41 перемикача «РАБОТА» в положення «Н». Це приводить до спрацювання в БУ-12 реле К7, К8, К26.
В результаті формується слідкуюча системаа (с/c): В1 ГА-8---В1 БУ-12---А2 БУ-12---М1 ГА-8. За рахунок її роботи обнуляються сигнали з В1 ГА-8, тобто електродвигун М1 встановлює статор ВТ В1 в узгоджене положення з ротором.
б). Відносно САУ.
Блок – схема каналу САУ в будь-якому режимі в загальному вигляді наведена на рис.5.
Рис.5. Узагальнена блок – схема каналу САУ.
При відповіді на питання завдання, необхідно розкрити узагальнену блок – схему відповідно варіанту. Особливу увагу звернути на обчислювач сервоприводу, де розміщені основні електронні вузли. Принцип роботи обчислювача в режимі варіанту розкритий в Л4.
Функція основних електронних вузлів обчислювача сервоприводу, їх функціональне позначення наведено на рис.6.

Рис.6. Позначення функціональних вузлів обчислювача сервоприводу.

Приклад виконання завдання. Скласти блок-схему повздовжнього каналу САУ-28 в режимі стабілізації кутів тангажу, навести спрощений закон управління і дати його характеристику.
Блок-схема каналу наведена нижче.
Спрощений закон керування має вигляд:


 рδв – сигнал швидкісного зворотного зв'язку; υ – сигнал тангажа літака; рυ – сигнал швидкості зміни тангажа літака;
рδв – сигнал швидкісного зворотного зв'язку; υ – сигнал тангажа літака; рυ – сигнал швидкості зміни тангажа літака; 
Принцип дії каналу.
При відхиленні літака від кута стабілізації (після включення каналу) при дії короткочасного збурення, на це реагують авіагоризонти АГКлів., АГКправ. і видають сигнали змінного струму пропорційні υ. Ці сигнали поступають в УПС де через трансформатори Т1÷Т4 подаються на перетворювачі з змінного струму в постійний складені на мікросхемах DD1÷DD4. Далі сигнали контакти комутаторів на DD2, DD5, які спрацьовують при справності авіагоризонтів, поступають на вхід обчислювача тангажа. Там сигнал з лівого АГК пропускається через ізодромну ланку складену на DA1.1, DA2, підсилюється підсилювачем на DA1.2, пропускається через обмежувач на VD4.1 і поступає на підсилювач-суматор на DA16.1.
На цей суматор поступає також сигнал з правого АГК, але пропущений через диференційну ланку на DA3. Таким чином на вході DA16.1 діє сума сигналів υ + рυ. Вихідний сигнал суматора підсилюється двоканально на DA15.2, DA16.2 по напрузі, поступає блок підсилювачів сервоприводу де підсилюється по потужності і поступає на двигун-генератор рульової машини.
Рульова машина відхиляє руль висоти до тих пір поки сигнал позиційного зворотного зв’язку з рульової машини, випрямлений перетворювачем на DD11 в обчислювачі тангажа і пропущений через ізодромну ланку на DA15.1 не зрівняється з управляючим сигналом. Одночасно формується в рульовій машині сигнал швидкісного зворотного зв’язку, який випрямляється перетворювачем на DD10 і поступає на DA5.2, DA6.2.
Під дією руля висоти літак вертається на кут стабілізації і після закінчення коливань літака, сигнали з АГК дорівнюють нулю. За рахунок сигналу позиційного зворотного зв’язку руль висоти встановиться в балансувальне положення.
Ізодромні ланки в колах сигналів тангажу і позиційного зворотного зв’язку при короткочасному збуренні не виконують своєї функції.
Перелік варіантів курсової роботи з предмету ПНО-ПС приладових спеціальностей.
Варіант №1. 1. Розв’язати задачу з рисунком рішення: Дано: ΔМ=5○; Ψм=60○; КЗ =20○; Визначити істинний шляховий кут (ІШК). Навести означення навігаційних параметрів, які використовувались в задачі.
2. Відобразити лицеву панель ПНП-72 з вибірковою індикацією: ЗПУ дорівнює 60º, РЗК – зліва. Дати означення використаних параметрів.
3. Скласти блок-схему бокового каналу САУ-28 в режимі стабілізації кутів крену, пояснити принцип роботи каналу.
Варіант №2. 1. Розв'язати задачу з рисунком рішення. Дано: δН =90○; Ψ =0○; W=1000 км/год; КВ= 60○; Визначте величину швидкості вітру (U). Навести означення навігаційних параметрів, які використовувались в задачі.
2. Відобразити лицеву панель ПНП-72 з вибірковою індикацією: ЗПУ дорівнює 30º, РЗК – зліва. Дати означення використаних параметрів.
3. Скласти блок-схему бокового каналу САУ-28 в режимі стабілізації кутів курсу, пояснити принцип роботи каналу.
Варіант №3. 1. Розв'язати задачу з рисунком рішення: Дано: δн= 90○; КВ=60○; Визначити магнітний шляховий кут (МШК). Навести означення навігаційних параметрів, які використовувались в задачі.
2. Відобразити лицеву панель ПНП-72 з вибірковою індикацією: ЗПУ дорівнює 40º, РЗК – справа. Дати означення використаних параметрів.
3. Скласти блок-схему бокового каналу САУ-28 в режимі управління по крену/курсу від ПУЛ, пояснити принцип роботи каналу.
Варіант №4. 1. Розв'язати задачу з рисунком рішення. Дано: КЗ=10○; ΔМ= -5○; Ψі= 60○. Визначити магнітний заданий шляховий кут(МЗШК). Навести означення навігаційних параметрів, які використовувались в задачі.
2. Відобразити лицеву панель ПНП-72 з вибірковою індикацією: ЗПУ дорівнює 60º, РЗГ – внизу. Дати означення використаних параметрів.
3. Скласти блок-схему бокового каналу САУ-28 в режимі управління по крену/курсу від ПНП-72, пояснити принцип роботи каналу.
Варіант № 5. 1. Розв'язати задачу з рисунком рішення: Дано: КЗ=10○; ΔМ= -5○; Ψі= 60○. Визначити магнітний заданий шляховий кут(МЗШК). Навести означення навігаційних параметрів, які використовувались в задачі.
2. Відобразити лицеву панель ПНП-72 з вибірковою індикацією: курс дорівнює 60º, РЗК – зліва. Дати означення використаних параметрів.
3. Скласти блок-схему бокового каналу САУ-28 в режимі стабілізації на РЗК, пояснити принцип роботи каналу.
Варіант №6. 1.Розв'язати задачу з рисунком рішення: Дано: δн =90○; Ψм= 0○; КВ=60○; Визначте кут знесення (КЗ). Навести означення навігаційних параметрів, які використовувались в задачі.
2. Відобразити лицеву панель ПНП-72 з вибірковою індикацією: курс дорівнює 30º, РЗК – справа. Дати означення використаних параметрів.
3. Скласти блок-схему бокового каналу САУ-28 в режимі стабілізації на маршруті, пояснити принцип роботи каналу.
Варіант №7. 1.Розв'язати задачу з рисунком рішення: Дано: Алі=270○; ККР=60○. Визначити істинний курс літака. Кут збігання меридіанів не враховувати. Навести означення навігаційних параметрів, які використовувались в задачі.
2. Відобразити лицеву панель ПНП-72 з вибірковою індикацією: заданий курс дорівнює 60º, РЗК – зліва. Дати означення використаних параметрів.
3. Скласти блок-схему бокового каналу САУ-28 в режимі стабілізації кутів крену, навести спрощений закон управління і дати його характеристику.
Варіант №8. 1. Розв'язати задачу з рисунком рішення: Дано: δн =90○; Ψі =0○; КВ=60○; ΔМ = 5○. Визначити кут знесення (КЗ). Навести означення навігаційних параметрів, які використовувались в задачі.
2. Відобразити лицеву панель ПНП-72 з вибірковою індикацією: заданий курс дорівнює 20º, РЗГ – зверху. Дати означення використаних параметрів.
3. Скласти блок-схему бокового каналу САУ-28 в режимі стабілізації кутів курсу, навести спрощений закон управління і дати його характеристику.
Варіант №9. 1. Розв'язати задачу з рисунком рішення: Дано: Ψм= 60○; ККР=30○; ΔМ= -10○ (в місці розташування радіомаяка). Кут збігання меридіанів не враховувати. Визначити азимут літака істинний (Алі). Навести означення навігаційних параметрів, які використовувались в задачі.
2. Відобразити лицеву панель ПНП-72 з вибірковою індикацією: ЗПУ дорівнює 20º, РЗГ – зверху. Дати означення використаних параметрів.
3. Скласти блок-схему бокового каналу САУ-28 в режимі управління по крену/курсу від ПУЛ, навести спрощений закон управління і дати його характеристику.
Варіант №10. 1 Розв'язати задачу з рисунком рішення: Дано: δн=90○; КЗ=30○; КВ=60○; Визначити магнітний курс літака(Ψм). Навести означення навігаційних параметрів, які використовувались в задачі.
2. Відобразити лицеву панель ПНП-72 з вибірковою індикацією: КЗ дорівнює +10º, РЗК – зліва. Дати означення використаних параметрів.
3. Скласти блок-схему бокового каналу САУ-28 в режимі управління по крену/курсу від ПНП-72, навести спрощений закон управління і дати його характеристику.
Варіант №11. 1. Розв'язати задачу з рисунком рішення: Дано: Арм=0○; Ψм=30○; Визначити курсовий кут радіомаяка (ККР). Навести означення навігаційних параметрів, які використовувались в задачі.
2. Відобразити лицеву панель ПНП-72 з вибірковою індикацією: КЗ дорівнює - 20º, РЗГ – внизу. Дати означення використаних параметрів.
3. Скласти блок-схему бокового каналу САУ-28 в режимі стабілізації на РЗК, навести спрощений закон управління і дати його характеристику.
Варіант №12. 1. Розв'язати задачу з рисунком рішення: Дано: КВ=60○; ККР =0○; ΔМ=-5○. Визначити азимут радіомаяка магнітний(Арм). Навести означення навігаційних параметрів, які використовувались в задачі.
2. Відобразити лицеву панель ПНП-72 з вибірковою індикацією: ЗПУ дорівнює 60º, курс дорівнює 20º. Дати означення використаних параметрів.
3. Скласти блок-схему бокового каналу САУ-28 в режимі стабілізації на маршруті, навести спрощений закон управління і дати його характеристику.
Варіант №13. 1. Розв'язати задачу з рисунком рішення: Дано: МШК=60○; U=300км/год; Ψм=30○; кут між векторами V та U дорівнює 90○. Визначити величину шляхової швидкості W. Навести означення навігаційних параметрів, які використовувались в задачі.
2. Відобразити лицеву панель ПНП-72 з вибірковою індикацією: ЗПУ дорівнює 90º, курс дорівнює 30º. Дати означення використаних параметрів.
3. Скласти блок-схему повздовжнього каналу САУ-28 в режимі стабілізації кутів тангажу, пояснити принцип роботи каналу.
Варіант №14. 1. Розв'язати задачу з рисунком рішення. Дано: ψм = 60°; курсовий кут радіомаяка (ККР) = 30°; ΔМ = -10°(в місці розташування радіомаяка). Кут збігання меридіанів не враховувати. Визначити азимут літака істинний (Алі). Навести означення навігаційних параметрів, які використовувались в задачі.
2. Відобразити лицеву панель ПНП-72 з вибірковою індикацією: РЗК справа, РЗГ внизу. Дати означення використаних параметрів.
3. Скласти блок-схему повздовжнього каналу САУ-28 в режимі управління кутами тангажу, пояснити принцип роботи каналу.
Варіант №15. 1. Розв'язати задачу з рисунком рішення. Дано: δН= 90º; ψі = 0º; КВ = 60º; ΔМ = 5º. Визначити кут знесення (КЗ). Навести означення навігаційних параметрів, які використовувались в задачі.
2. Відобразити лицеву панель ПНП-72 з вибірковою індикацією: РЗГ зверху, РЗК зліва. Дати означення використаних параметрів.
3. Скласти блок-схему повздовжнього каналу САУ-28 в режимі стабілізації висоти, пояснити принцип роботи каналу.
Варіант №16. 1. Розв'язати задачу з рисунком рішення. Дано: Арі = 180º; ψі = 60º; Визначити курсовий кут радіомаяка (ККР). Навести означення навігаційних параметрів, які використовувались в задачі.
2. Відобразити лицеву панель ПНП-72 з вибірковою індикацією: азимут дорівнює 60º, РЗК – зліва. Дати означення використаних параметрів.
3. Скласти блок-схему повздовжнього каналу САУ-28 в режимі стабілізації на РЗГ, пояснити принцип роботи каналу.
Варіант №17. 1. Розв'язати задачу з рисунком рішення. Дано: ψм = 30º, ∆М = +5º; Визначити істинний курс (ψі). Навести означення навігаційних параметрів, які використовувались в задачі.
2. Відобразити лицеву панель ПНП-72 з вибірковою індикацією: ККР дорівнює 60º, РЗК – зліва. Дати означення використаних параметрів.
3. Скласти блок-схему повздовжнього каналу САУ-28 в режимі стабілізації кутів тангажу, навести спрощений закон управління і дати його характеристику.
Варіант №18. 1. Розв'язати задачу з рисунком рішення. Дано: ψм = 30º, ∆М = -5º; Визначити істинний курс (ψі). Навести означення навігаційних параметрів, які використовувались в задачі.
2. Відобразити лицеву панель ПНП-72 з вибірковою індикацією: ККР дорівнює 30º, РЗК – справа. Дати означення використаних параметрів.
3. Скласти блок-схему повздовжнього каналу САУ-28 в режимі управління кутами тангажу, навести спрощений закон управління і дати його характеристику.
Варіант №19. 1. Розв'язати задачу з рисунком рішення. Дано: ψі = 60º, ∆М = +5º; Визначити магнітний курс (ψм). Навести означення навігаційних параметрів, які використовувались в задачі.
2. Відобразити лицеву панель ПНП-72 з вибірковою індикацією: азимут дорівнює 80º, РЗК – зліва. Дати означення використаних параметрів.
3. Скласти блок-схему повздовжнього каналу САУ-28 в режимі стабілізації висоти, навести спрощений закон управління і дати його характеристику.
Варіант №20. 1. Розв'язати задачу з рисунком рішення. Дано: ψі = 60º, ∆М = -5º; Визначити магнітний курс (ψм). Навести означення навігаційних параметрів, які використовувались в задачі.
2. Відобразити лицеву панель ПНП-72 з вибірковою індикацією: ККР дорівнює 0º, РЗГ- внизу. Дати означення використаних параметрів.
3. Скласти блок-схему повздовжнього каналу САУ-28 в режимі стабілізації на РЗГ, навести спрощений закон управління і дати його характеристику.
Варіант №21. 1. Розв'язати задачу з рисунком рішення. Дано: ККР = 30º, ψм = 60º; Визначити азимут маяка магнітний (Арм). Навести означення навігаційних параметрів, які використовувались в задачі.
2. Відобразити лицеву панель ПНП-72 з вибірковою індикацією: курс дорівнює 0º, ККР – 30º. Дати означення використаних параметрів.
3.Скласти блок-схему БСФК в режимі «Настройка», пояснити принцип роботи.
Варіант №22. 1. Розв'язати задачу з рисунком рішення. Дано: ККР = 30º; ψм = 60º; ∆М = +5º. .Визначити азимут маяка істинний (Арі). Навести означення навігаційних параметрів, які використовувались в задачі.
2. Відобразити лицеву панель ПНП-72 з вибірковою індикацією: азимут дорівнює 90º, РЗК – зліва. Дати означення використаних параметрів.
3. Скласти блок-схему БСФК в режимі «ГПК», пояснити принцип роботи.
Варіант №23. 1. Розв'язати задачу з рисунком рішення. Дано: ψі = 60º, КЗ = +20º. .Визначити істинний шляховий кут (ІШК). Навести означення навігаційних параметрів, які використовувались в задачі.
2. Відобразити лицеву панель ПНП-72 з вибірковою індикацією: заданий курс дорівнює 90º, РЗГ – справа. Дати означення використаних параметрів.
3. Скласти блок-схему БСФК в режимі «МК», пояснити принцип роботи.
Варіант №24. 1.Визначити швидкість відхилення головної вісі гіроскопу типу «АГ» на широті φ = 60º від вертикалі. Графічно підтвердити рішення.
2. Відобразити лицеву панель АГК-77 з вибірковою індикацією: γ = 20º лівий, δн – збільш тангаж.
3.Скласти вибіркову схему 1 слідкуючої системи в режимі «ГПК» КС БСФК, пояснити принцип роботи.
Варіант № 25. 1.Визначити швидкість відхилення головної вісі гіроскопу типу «ГПК» на широті φ = 30º в азимуті. Графічно підтвердити рішення.
2. Відобразити лицеву панель АГК-77 з вибірковою індикацією: γ = 10º лівий, δн – збільш тангаж.
3. Скласти вибіркову схему 2 слідкуючої системи в режимі «ГПК» КС БСФК, пояснити принцип роботи.
Варіант №26. 1.Навести принципову схему маятникової вертикальної корекції в авіагоризонтах та пояснити принцип її дії.
2. Відобразити лицеву панель АГК-77 з вибірковою індикацією: γ = 20º правий, δн – збільш тангаж.
3. Скласти вибіркову схему начальної виставки КС БСФК в режимі «ГПК» пояснити принцип роботи.
Варіант №27. 1.Навести принципову схему маятникової горизонтальної корекції в гіроагрегатах та пояснити принцип її дії.
2. Відобразити лицеву панель АГК-77 з вибірковою індикацією: γ = 10º правий, δн – збільш тангаж.
3. Скласти вибіркову схему широтної корекції в КС БСФК, пояснити принцип роботи.
Варіант №28. 1.Навести принципову схему моментної азимутальної (широтної) корекції в гіроагрегатах та пояснити принцип її дії.
2. Відобразити лицеву панель АГК-77 з вибірковою індикацією: υ = 20º пікірування, δн – збільш тангаж.
3. Скласти вибіркову схему усунення похибки від дрейфу гироскопу в КС БСФК, пояснити принцип роботи.
Варіант №29. 1.Навести принципову схему кінематичної азимутальної (широтної) корекції в гіроагрегатах та пояснити принцип її дії.
2. Відобразити лицеву панель АГК-77 з вибірковою індикацією: υ = 10º пікірування, δн – збільш тангаж.
3. Скласти вибіркову схему підканалу гіромагнітного курсу в КС БСФК, пояснити принцип роботи.
Варіант №30. 1.Навести принципову схему вузла обертових підшипників в гіроагрегатах та пояснити принцип її дії.
2. Відобразити лицеву панель АГК-77 з вибірковою індикацією: υ = 20º кабрірування, δн – збільш тангаж.
3. Скласти вибіркову схему режиму «МК» в КС БСФК, пояснити принцип роботи.
Варіант №31. 1.Навести принципову схему інерціальної системи на площині та пояснити принцип її дії.
2. Відобразити лицеву панель АГК-77 з вибірковою індикацією: υ =10º кабрірування, δн – збільш тангаж.
3.Пояснити сутність магнітної корекції в КС БСФК.
Варіант №32. 1.Пояснити принцип настройки на період Шулера в інерціальних системах.
2. Відобразити лицеву панель АГК-77 з вибірковою індикацією: γ = 20º лівий, δz – збільш лівий крен.
3.Скласти спрощену схему блоку контролю БК-31 в КС БСФК, пояснити принцип роботи.
Варіант №33. 1. Навести принципову схему електромеханічного акселерометра та пояснити принцип його дії.
2. Відобразити лицеву панель АГК-77 з вибірковою індикацією: γ = 10º правий, δz – збільш правий крен.
3. Скласти спрощену схему сигналізатора С-22 в КС БСФК, пояснити принцип роботи.
Варіант№34. 1.Навести принципову схему електромеханічного гіроскопічного датчика кутової швидкості та пояснити принцип його дії.
2. Відобразити лицеву панель АГК-77 з вибірковою індикацією: δz – збільш правий крен, δн – збільш тангаж..
3. Скласти спрощену схему порогового пристрою в КС БСФК, пояснити принцип роботи.
Варіант №35. 1. Навести принципову схему лазерного датчика кутової швидкості та пояснити принцип його дії.
2. Відобразити лицеву панель АГК-77 з вибірковою індикацією: δz – зменш правий крен, δн – збільш тангаж.
3. Відобразити лицеві панелі пультів управління і контролю САУ-28 і пояснити призначення органів керування і сигналізації.
Варіант №36. 1.Навести принципову схему електромеханічного гіроскопічного датчика вимірювача кутів крену і тангажу та пояснити принцип його дії.
2. Відобразити лицеву панель АГК-77 з вибірковою індикацією: δz – збільш правий крен, δн – зменш тангаж.
3. Відобразити лицеві панелі пульта управління, блоків БСФК і пояснити призначення органів керування і сигналізації.

