




Цели
После изучения данного раздела обучающийся должен уметь следующее:
| 1. | Назвать и объяснить три причины, по которым необходимо выполнять инклинометрические измерения. |
| 2. | Назвать, как минимум, четыре причины, объясняющие необходимость точного знания координат ствола скважины. |
| 3. | Назвать и дать определение параметрам, измеряемым инклинометрическими приборами. |
| 4. | Назвать основные существующие типы инклинометрических систем и описать сферу применения каждой из них. |
| 5. | Назвать основные преимущества и ограничения каждой существующей инклинометрической системы. |
Раздел 
Обзор инклинометрических измерений
| 11.1 | Причины проведения инклинометрии | ||
| Инклинометрические измерения проводятся в следующих целях: q для обеспечения возможности расчета координат скважины на определенной измеренной глубине с целью уточнения траектории скважины и текущего положения забоя; q для определения зенитного угла, направления ствола на забое и, следовательно, общего направления скважины; q для определения ориентации рабочей плоскости отклоняющего инструмента или управляемых систем; q для определения координат точек искривлений и расчета интенсивности искривления стола. Знание точной траектории ствола скважины необходимо: q для достижения заданного геологического горизонта; q для обеспечения безопасного расхождения скважин, в частности при бурении с платформы; q для определения проектного забоя глушащей скважины в случае фонтанирования; q для более точного определения характеристик геологических структур и продуктивного пласта с целью оптимизации добычи; q для обеспечения соответствия требованиям местного законодательства. | |||
| 11.2 | Параметры, измеряемые инклинометрическими приборами | ||
| С помощью инклинометрических приборов, в основном, измеряют угол отклонения от вертикали (зенитный угол) и азимут ствола скважины на конкретной глубине. | |||
 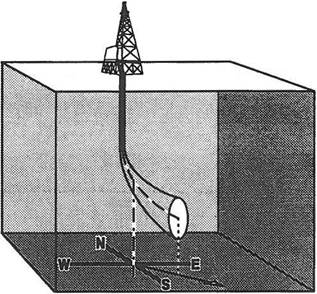 | |||
| Рис. 11-1 | |||
| Определения q Зенитный угол скважины представляет собой угол между вертикальной осью и осью ствола в конкретной точке. q Азимут ствола в конкретной точке указывает на направление ствола в горизонтальной плоскости, определенное по часовой стрелке (0°-359,9°) относительно севера. Исключением являются инерциальные навигационные системы. Прибор данного типа измеряет составляющие ускорения по трем осям при движении бурового инструмента. Результаты измерения ускорения дважды интегрируются по времени для определения, во-первых, скоростей, а во-вторых, величин смещения. Данные величины смещения представляют собой координаты ствола. | |||
| 11.3 | Приборы, используемые для инклинометрии скважины | ||
| 1. Указатель искривленияствола представляет собой инклинометрический прибор для измерения отклонения ствола от вертикали. Поэтому измерения с использованием указателя искривления производятся только в вертикальных скважинах (например, разведочных скважинах). 2. Магнитный инклинометр для одноточечных измерений представляет собой прибор, записывающий одновременно указания магнитного направления и зенитный угол необсаженного ствола на дисковую пленку. Ранее, магнитные одноточечные измерения проводились через равные интервалы по мере бурения скважины для контроля ее траектории. В настоящее время данные приборы, главным образом, используются для проверки результатов ИПБ. 3. Гироскоп для одноточечных измеренийодновременно записывает на дисковую пленку указания направления и зенитный угол ствола и невосприимчив к помехам, создаваемым обсадной колонной, и прочим магнитным воздействиям. Вместо гироскопа для одноточечных измерений могут использоваться компактные гироскопы, передающие данные на поверхность. Гироскоп для одноточечных измерений используется, в первую очередь, для ориентирования отклоняющего инструмента при зарезке наклонного ствола в случаях, когда магнитные помехи могут влиять на точность результатов ИПБ. | |||
| 4. Кабельный отклоняющий инструмент представляет собой инклинометрический прибор, используемый при бурении ствола забойным двигателем с кривым переводником для непрерывной передачи результатов измерений на поверхность. Данный скважинный инструмент включает в свой состав твердотельный электронный зонд, промежуточные штанги и башмак с косым срезом. Предварительные данные с зонда передаются на поверхность по токопроводящему кабелю. Компьютер, установленный на поверхности, расшифровывает сигналы и выдает результаты измерений. Для обеспечения возможности использования кабельной линии в стволе во время циркуляции бурового раствора необходимо использовать специальную промывочную головку или переводник с боковым входом. 5. Прибор для ИПБ представляет собой инклинометр, проводящий инклинометрические измерения и определяющий иные параметры ствола в ходе бурения. Приборы для ИПБ используются как часть КНБК. Как и кабельные отклоняющие инструменты, данные приборы также производят измерения с использованием магнитометров, измеряющих составляющие магнитного поля Земли, и акселерометров, измеряющих составляющие силы тяжести. Предварительные данные передаются на поверхность в виде импульсов давления через буровой раствор. Данные импульсы давления формируют двоичные коды, состоящие из единиц и нулей. Приборы для ИПБ используются не только для ориентирования отклоняющего инструмента, но и для инклинометрии наклонно-направленных скважин через равные промежутки по мере бурения скважины. 6. Магнитный инклинометр для многоточечных измерений представляет собой прибор, записывающий одновременно указания магнитного направления и зенитный угол необсаженного ствола на пленку в нескольких точках регистрации. Магнитные инклинометры для многоточечных измерений спускаются в скважину после подъема КНБК. Данный скважинный инструмент устанавливается на немагнитной УБТ для того, чтобы магнитный компас находился на максимально возможном расстоянии от намагниченной стали УБТ. Электронный магнитный инклинометр для многоточечных измерений (EMS) включает в свой состав износостойкий электронный зонд с комплектом акселерометрических и магнитометрических датчиков. Данные записываются на запоминающее устройство в скважине, а затем переносятся на жесткий диск компьютера для обработки после поднятия инструмента на поверхность. 7. Гироскоп для многоточечных измерений представляет собой прибор, не восприимчивый к помехам, создаваемым обсадной колонной, и прочим магнитным воздействиям. Данный гироскоп спускается в скважину на кабеле. Инструмент останавливают через определенные интервалы и производят измерения. Существует три различные системы измерений. Первая система является фотомеханической, в которой камера многоточечной съемки делает снимки показаний гирокомпаса и гироскопического блока измерения угла на всех контрольных глубинах. Также существуют системы электронных датчиков показания которых считываются с поверхности, такие датчики работают по принципу гироскопа с уравновешенным ротором. Последней разработкой является скважинная система со считыванием показаний на поверхности, работающая по принципу тахоинтегрирующих гироскопов (например, SEEKER) и имеющая ряд существенных преимуществ над традиционным гироскопом для многоточечных измерений. Описание данных систем приведено в Приложении 4. 8. Инерциальная навигационная система измеряет компоненты ускорения при движении системы. Измерения производятся комплектом из трех акселерометров, установленных на платформе под прямым углом друг к другу. Результаты измерения ускорения дважды интегрируются по времени для определения, во-первых, скорости, а во-вторых, величин смещения. В нефтедобыче используются два типа серийно выпускаемых инерциальных навигационных приборов, которые также применяются компанией Baker Hughes INTEQ. Прибор FINDS оснащен подвешенной на карданном соединении инерциальной платформой, удерживаемой в неподвижном положении моментными датчиками. Данные моментные датчики управляются выходными сигналами скоростных гироскопов, установленных на инерциальной платформе. Прибор RIGS оснащен неподвижной инерциальной навигационной системой с комплектом акселерометров, установленных на корпусе инструмента. Данная неподвижная инерциальная навигационная система измеряет угол поворота корпуса инструмента по осям координат на основании выходных сигналов скоростных гироскопов. Перед интегрированием выходные сигналы акселерометра преобразуются с помощью математических вычислений в местную уравновешенную систему координат. В отличие от карданной системы механического действия в работе неподвижной системы используются математические расчеты. Скоростные гироскопы, используемые в инструменте RIGS, представляют собой кольцевые лазерные приборы. | |||
Примечания

