




Управление судном
Методические указания по выполнению курсовой работы на тему:
«ОПРЕДЕЛЕНИЕ МАНЕВРЕННЫХ ХАРАКТЕРИСТИК СУДНА»
Одесса–2010
Управление судном: Методические указания по выполнению курсовой работы на тему «Определение маневренных характеристик судна». - Одесса: Одесская национальная морская академия, 2007. – 68 с.
Составлены заведующим кафедрой «Управление судном», капитаном дальнего плавания, профессором Мальцевым А.С. и аспирантом кафедры «Управление судном» МАЙ БА ЛИНЕМ. Дополнено и исправлено ассистентом кафедры «Управление судном» капитаном дальнего плавания Калиниченко Е.В.
Настоящие методические указания по выполнению курсовой работы составлены в соответствии с программой учебной дисциплины «Управление судном» для высших морских учебных заведений направления 1003 “Судовождение и энергетика судов”. Они учитывают требования Рекомендаций по организации штурманской службы на морских судах Украины (РШСУ- 98), Международной конвенции о подготовке и дипломированию моряков и несения вахты 1978 г. c поправкам 1995 года, Резолюции MSC 137(76), принятой 5 декабря 2002 года и других нормативных документов. При разработке настоящих указаний, кроме имеющейся специальной технической литературы и справочников, были использованы результаты натурных испытаний морских судов ЧМП, проведенных кафедрой "Управление судном" за последние 25 лет.
Утверждены на заседании Ученого совета факультета морского судовождения 5 октября 2004 года, протокол №2
Дополнения и исправления рассмотрены и утверждены на заседании кафедры «Управление судном», протокол № 15 от 16.03.2010.
© Одесская национальная морская академия, 2010
 |
СОДЕРЖАНИЕ
Введение…………..……………………………………………………….. 4
1. Содержание курсовой работы и указания по ее
оформлению и защите……………………………………………….. 5
Назначение курсовой работы…………………………………………. 5
Содержание и объем курсовой работы………………………………. 5
Основные требования к оформлению расчетно-пояснительной
записки и чертежей………………………………………………………….. 5
Защита курсовой работы …………………………………………….. 7
2. Методические указания по выполнению курсовой
работы………………………………………………………………………. 8
2.1. Классификация маневренных характеристик…..………………..…….. 8
2.2. Инерционно-тормозные характеристики………..…………………..... 9
2.3. Характеристики управляемости……………….……………………..... 20
2.4. Определение характеристик поворотливости из эксперимента…..... 28
2.5. Влияние мелководья на управляемость и инерционно-тормозные
характеристики судна……………………………………………………….… 33
2.6. Управление маневрами судна на течении…………………………...... 37
2.7. Управление маневрами судна при ветре……………………………… 43
2.8. Порядок выполнения натурных наблюдений…….………………….. 46
2.9. Определение переходных коэффициентов……….…..………………. 47
2.9.1 Определение переходного коэффициента  из эксперимента пас-
из эксперимента пас-
сивного торможения ………………………………………………………… 47
2.9.2 Определение переходного коэффициента  из эксперимента
из эксперимента
активного торможения…………………………………………………….… 47
2.9.3 Определение переходных коэффициентов параметров циркуляции.. 48
2.10. Расчет характеристик пассивного торможения……………...……… 49
2.11. Расчет характеристик активного торможения….……………………. 51
2.12. Расчет характеристик поворотливости………………………………… 53
2.13. Расчет влияния мелководья на параметры поворотливости…..……. 56
2.14. Расчет характеристик разгона и подтормаживания …………………. 57
3. Задания НА курсовую работу……………………….….….… 59
4. Вопросы для защиты курсовой работы……….………... 61
Список рекомендуемой литературы……….……….………….. 62
Приложение А. Образец титульного листа………………………………….. 63
Приложение Б. Форма бланка «Исходные данные для расчета»…………… 64
Приложение В. Форма бланка «Исходные данные на английском языке» … 65
Приложение Г. Образец данных о маневренных характеристиках для мос-
тика судна ……………………………………………………………………… 66
Приложение Д. Построение линейных графиков ИМО ……………………. 67
Введение
Количественный рост мирового флота, существенное ускорение обработки судов в морских портах и увеличение их эксплуатационного периода, заметный рост размеров и скоростей судов в последние десятилетия привели к значительному повышению интенсивности судоходства. Увеличение плотности движения судов приводит к затруднению безопасного управления судном.
Несмотря на оборудование мостиков современными средствами навигации и управления, на море ежегодно 3-4 судна пропадают без вести, происходит в среднем около 220 аварий, в том числе 50 столкновений. Принято считать, что около 10% аварий происходит в результате форс-мажорных обстоятельств, около 15% является следствием отказа технических средств управления судном, их систем и устройств. Оставшиеся 75% относят к субъективным причинам, которые характеризуют обобщенным понятием – влиянием «человеческого фактора».
В соответствии с требованиями Рекомендаций по организации штурманской службы на морских судах Украины инерционно-тормозные характеристики и управляемости судна учитываются при: плавании в районах со стесненными условиями, выборе безопасной скорости, расхождении со встречными судами, маневрировании на акватории портов, подходах к причалам и других видах маневрирования в сложных условиях, когда это необходимо для обеспечения безопасности судна.
Информацию, с которой работает судоводитель при управлении движением судна, можно разделить на два вида – процедурная и декларативная. Процедурная информация заключена в алгоритмах действий, которые используются при реализации процесса управления и отдаваемых команд. Декларативная информация овеществлена в данных, с которыми он работает при этом.
Совокупность таких данных образуют информационную базу. Поскольку в базах данных о судне и внешних воздействиях на него хранится одновременно большое количество информации, то требуется организовать специальную систему управления базами данных.
По мере совершенствования информационного обеспечения процесса маневрирования возникла форма представления информации в виде знаний, которая объединила черты процедурного и декларативного его видов. При отсутствии знания управление процессом маневрирования производится методом проб и ошибок, в результате чего существенно увеличивается вероятность принятия неправильного решения и возникновения навигационного происшествия.
Каждый судоводитель для безопасного управления движением судов должен четко понимать физические процессы, происходящие при маневрировании, и заблаговременно, решительно и точно действовать в любых ситуациях при разных навигационных условиях.
При выполнении курсовой работы ставится цель - овладеть профессиональными навыками по безопасному управлению судном при любых видах маневрирования, приобрести знания по пониманию физических процессов, происходящих при маневрировании судов, практические навыки по выполнению расчетов их маневренных характеристик.
1. Содержание курсовой работы и указания по ее оформлению и защите
1.1. Назначение курсовой работы
Курсовая работа предназначена для получения практических навыков по расчету маневренных свойств судна и понимания физических процессов, которые происходят при его маневрировании на глубокой воде и мелководье.
1.2. Содержание и объем курсовой работы
Курсовая работа должна содержать титульный лист и лист задание рекомендуемого образца, приведенного в Приложении А и Б.
Содержание работы должно освещать решение следующих вопросов:
1. Классификацию маневренных характеристик и основные определения.
2. Расчет переходных коэффициентов:
2.1 Расчет переходного коэффициента  ;
;
2.2 Расчет переходного коэффициента  ;
;
2.3 Расчет переходных коэффициентов 

 и
и 
2.4. Расчет переходных коэффициентов мелководья.
3. Расчет характеристик пассивного торможения.
4. Расчет характеристик активного торможения.
5. Расчет характеристик поворотливости и диаграммы управляемости.
6. Расчет характеристик разгона и подтормаживания.
7. Расчет параметров поворотливости на мелководье.
Работа должна быть выполнена от руки, объем работы до 35 страниц рукописного текста.
1.3. Основные требования к оформлению
расчетно-пояснительной записки и чертежей
Оформление курсовой работы выполняется в соответствии с требованиями методических указаний, ДСТУ 3008-95 «Документация. Отчеты в сфере науки и техники. Структура и правила оформления» и ГОСТ 2.105-95 «Требования к текстовым документам», утвержденным как межгосударственный стандарт. Здесь приведены основные выдержки из этих документов.
Структура курсовой работы.
Структура курсовой работы должна включать:
– титульный лист (Приложение А);
– содержание;
– исходные данные для расчета маневренных характеристик (Приложение Б);
– введение;
– краткие сведения о маневренных характеристиках, включая их классификацию и основные определения;
– расчет переходных коэффициентов:
расчет переходного коэффициента  ;
;
расчет переходного коэффициента  ;
;
расчет переходных коэффициентов и  ;
;
расчет переходных коэффициентов мелководья;
– расчет характеристик пассивного торможения;
– расчет характеристик активного торможения;
– расчет характеристик поворотливости и диаграммы управляемости;
– расчет характеристик разгона и подтормаживания;
– расчет влияния мелководья на параметры поворотливости;
– заключение;
– список использованной литературы.
Курсовая работа оформляется на листах формата А4 рукописным способом на одной стороне листа.
Заголовки подразделов, пунктов и подпунктов курсовой работы следует начинать с абзацного отступа и печатать строчными буквами, кроме первой прописной, не подчеркивая, без точки в конце. Абзацный отступ должен быть одинаковым по всему тексту и равняться пяти знакам.
Если заголовок состоит из двух и более предложений, их разделяют точкой. Перенос слов в заголовке не допускается.
Расстояние между заголовком и последующим или предыдущим текстом должно быть не менее двух строк.
Нумерация страниц. Страницы следует нумеровать арабскими цифрами, придерживаясь сквозной нумерации по всему тексту курсовой работы. Номер страницы проставляют в правом верхнем углу страницы без точки.
Титульный лист и лист-задание входят в общую нумерацию страниц курсовой работы, но номер страницы на титульном листе не проставляют. Иллюстрации и таблицы, размещенные на отдельных страницах, включают в общую нумерацию страниц курсовой работы.
Иллюстрации. Иллюстрации (чертежи, рисунки, графики, диаграммы) следует размещать в курсовой работе непосредственно после текста, где они упоминаются впервые, или на следующей странице. На все иллюстрации должны быть ссылки в работе в виде выражения в круглых скобках “(рис. 3)” или оборота типа: “... как это видно на рис. 3” или “...как это показано на рис. 3”.Нумерация рисунков – сквозная. Названия иллюстраций размещают под иллюстрацией сразу после их номеров. Например, «Рисунок 3 – Линейный график пассивного торможения».
Все рисунки и графики должны быть выполнены черными (синими) чернилами, пастовой ручкой или тушью с использованием лекал и других чертежных инструментов.
Таблицы. Цифровой материал, как правило, оформляют в виде таблиц, которые следует располагать непосредственно после текста, в котором они упоминаются впервые, или на следующей странице. На все таблицы должна быть ссылка в тексте.
Таблица должна иметь номер и название, которое пишут строчными буквами (кроме первой прописной) и помещают над таблицей. Название должно быть кратким и отображать содержание таблицы. Нумерация таблиц сквозная, без отнесения к разделу. Например:
Таблица 2 - Значения коэффициентов поворотливости
Заголовки граф таблицы начинают с большой буквы, а подзаголовки - с маленькой, если они составляют одно предложение с заголовком. Подзаголовки, которые имеют самостоятельное значение, пишут с большой буквы. В конце заголовков и подзаголовков таблиц точки не ставят. Заголовки и подзаголовки граф указывают в единственном числе
Формулы и уравнения. Формулы и уравнения располагают непосредственно после текста, в котором они упоминаются, на середине страницы. Выше и ниже каждой формулы или уравнения должно быть оставлено не менее одной свободной строки. Формулы и уравнения в работе (за исключением формул и уравнений, приведенных в приложениях) следует нумеровать сквозной порядковой нумерацией в пределах курсовой работы.
Номер формулы или уравнения отмечают на уровне формулы или уравнения в скобках в крайнем правом положении на строке.
Список литературных источников. Список литературных источников приводят, согласно библиографическому описанию, которое приведено в начале каждого используемого источника.
Например:
1. Мальцев А.С. Маневрирование судов при расхождении. - Одесса.: ОМТЦ, 2004.-212 с.
1.4. Защита курсовой работы
После выполнения работы ее необходимо сдать на проверку руководителю. После проверки и устранения выявленных замечаний необходимо подготовиться к защите. Перечень вопросов, которые будут заданы при защите, приведен в конце методических указаний.
2. Методические указания по выполнению
курсовой работы
2.1. Классификация маневренных характеристик
Для описания поведения судна, как объекта управления, используют совокупность параметров, которые позволяют судить о физических процессах, происходящих при изменении режима его движения, называют маневренными характеристиками. Их подразделяют на две основные группы: инерционно-тормозные и управляемости.
В связанной с судном системе координат, общепринятая система дифференциальных уравнений, описывающая движение судна в горизонтальной плоскости имеет вид [1]


 (1)
(1)

где Рe - сила упора винта; Re - боковая сила винта и сила взаимодействия винта и корпуса судна; Rгx, Rax, Rpx - продольные составляющие гидродинамической, аэродинамической сил и силы на руле; Rгу, Rау, Rру - поперечные составляющие тех же сил; Mг, Mа, Mбс, Mр - моменты гидро и аэродинамической сил, боковой силы винта и руля; l 11, l 12, l 66 - присоединенная масса по оси Х, У, и присоединенный момент инерций; Vx, Vy и ω составляющие линейной и угловой скоростей.
При расчете инерционно-тормозных характеристик используют первое уравнение системы (1), которое при прямолинейном движении записывается
 (2)
(2)
где mx – масса судна у учетом присоединенной массы по оси Х; К - коэффициент сопротивления.
При решении уравнения (2) вводят ряд допущений, которые упрощают расчет пути и времени торможения с сохранением точности, требуемой нормативными документами. Основные из допущений следующие.
1. Присоединенная масса воды по оси Х приближенно равна 10% от массы судна (mх =1,1· D) и остается неизменной при маневрировании. Более точно величину присоединенной массы можно определить по формуле
 (3)
(3)
где В - ширина судна; Т - средняя осадка; r - массовая плотность воды.
2. Зависимость сопротивления воды и воздуха от скорости носит квадратичный характер, а коэффициенты сопротивления воды К и воздуха Ки во время маневрирования постоянны.
3. Упор винта в процессе активного торможения изменяется по зависимости, полученной профессором Деминым С.И. [2]
 (4)
(4)
где Рmax - значение силы упора винта в момент остановки; Vх - текущая скорость; Vн - скорость в момент начала вращения винта на задний ход.
4. При маневрировании новое назначенное число оборотов достигает своего значения в момент подачи команды.
2.2. Инерционно-тормозные характеристики
Для описания судна, как объекта управления, используют маневренные характеристики. Их классификация приведена на рис.1.
В соответствии с приведенной классификацией [1] к инерционно-тормозным характеристикам относятся: разгон; подтормаживание; пассивное торможение и активное торможение.
Приведем краткое определение каждой из приведенных характеристик.
Пассивное торможение представляет собой процесс уменьшения скорости при движении судна с неработающим движителем, за счет сопротивления воды.
Активным торможением называется процесс уменьшения скорости движения судна за счет упора винта, работающего на задний ход.
Разгон представляет собой процесс увеличения скорости от низшей ступени к высшей. Особым случаем такого маневра является разгон из неподвижного состояния и разгон с переложенным рулем.
Подтормаживанием называется процесс уменьшения скорости от высшей ступени движения к низшей.
К характеристикам устойчивости относятся: постоянная времени задержки поворота Т(δ); устойчивость на курсе, критерий Q; зона неустойчивости ± v 0 , ± d 0р; одерживания поворота, время tо(d) и угол Q о (d).
К характеристикам поворотливости относятся: выдвиг  (d); прямое смещение
(d); прямое смещение  (d); обратное смещение
(d); обратное смещение  (d); тактический диаметр Dт(d); диаметр установившейся циркуляции Dу (d) и период циркуляции Т(V,d) (рисунок 2).
(d); тактический диаметр Dт(d); диаметр установившейся циркуляции Dу (d) и период циркуляции Т(V,d) (рисунок 2).
 |
Рисунок 2 – Движение судна на циркуляции
Количество характеристик торможения и форма их представления, которые должны быть на судне, определяются рекомендациями ИМО и требованиями национальных нормативных документов Украины (РШСУ-98) [3]. При назначении режима движения судна используют условное деление всей мощности на части, равные 0.7, 0.5, 0.3 от мощности полного переднего хода.
Для обозначения режимов движения будем использовать условные обозначения, рекомендованные РШСУ -98: ПП - передний полный ход; ППм - передний полный маневренный ход; ПС - передний средний ход; ПМ - передний малый ход; ПСМ - передний самый малый ход; ЗП - задний полный ход; ЗС - задний средний ход; ЗМ - задний малый ход; ЗСМ - задний самый малый ход.
Из данных о характеристиках, которые составляют полное представление о его свойствах, только 20% от общего количества имеется в настоящее время на судне. Сложилась парадоксальная ситуация, когда на судне имеются данные о маневренных характеристиках для режимов, которые не используются на мостике судна при обычном маневрировании во время эксплуатации.
Последнее время на судах широко внедрена рекомендация ИМО о составлении на судах судового плана перехода, с детализацией всех этапов движения судна, «от причала до причала». Однако построить указанный план при отсутствии соответствующих данных практически невозможно. В то же время требования, которые содержатся в Резолюции ИМО А.751 (18), принятой 4 ноября 1993 года, не определяют объем и количество данных, которые должны быть на судне. Они содержат требования, которые скорей можно отнести к тем, при которых должны проектироваться суда, другими словами нормируют их значения. Судоводитель обычно работает на судне, которое уже построено, и он должен определять значения параметров и учитывать те характеристики, которыми оно обладает.
Для описания каждого из приведенных выше режимов движения применяют дифференциальные уравнения, которые описывают перемещение центра тяжести по продольной оси. Их получают из системы уравнений (1).
Процесс пассивного торможения описывается дифференциальным уравнением
 (5)
(5)
Он имеет два периода. Прохождение команды t', от момента подачи команды "Стоп" до прекращения подачи топлива на главный двигатель, (и обычно его принимают равным 10 с). Собственно пассивное торможение t'', от начальной скорости Vo до конечной скорости Vк, которую принимают равной 0.2 V0 или скорости потери управляемости, что наступит раньше (см рис. 3).
Решение уравнения (5) относительно пути, времени и скорости позволяет получить следующие выражения. Значение пути I периода равно
SI = 0.514· V0·tI,
где V0 –начальная скорость в узлах; tI – время I периода, которое в системах с дистанционным автоматизированным управлением (ДАУ) составляет около 5 с, в обычных двигателях можно принять равным 10 с.
Значение времени и пути II периода равно
 (6)
(6)
 . (7)
. (7)
 |
Величину коэффициента общего сопротивления К можно получить по эмпирическим формулам
 , (8)
, (8)
где Ω – площадь смоченной поверхности, м2; В – ширина судна, м; Т – средняя осадка, м.
Площадь смоченной поверхности определяется по эмпирической формуле
 (9)
(9)
где D – водоизмещения судна, т.
Значение коэффициента  можно получить из эксперимента пассивного торможения, путем определения времени tII падения скорости от V0 до V по формуле
можно получить из эксперимента пассивного торможения, путем определения времени tII падения скорости от V0 до V по формуле
 (10)
(10)
Наиболее точным будет определение коэффициента К из натурных наблюдений, однако, для всех возможных водоизмещений это сделать затруднительно. Поэтому для уменьшения затрат времени на натурные наблюдения и повышения точности расчетного способа использую переходные коэффициенты. При этом для водоизмещения при эксперименте рассчитывают Красч и определяют Кэ, тогда переходный коэффициент равен
Время и путь пассивного торможения будут равны

 (11)
(11)
Информация о пассивном торможении используется при снижении скорости перед началом маневрирования, в случае отказа двигателя или как составная часть активного торможения.
Процесс активного торможения описывается дифференциальным уравнением
 . (12)
. (12)
Обозначим коэффициент активности торможения, а = Pmax / кVн2, и с учетом характера изменения силы упора винта, в процессе активного торможения, описываемого формулой (3), уравнение (11) можно привести к виду, удобному для интегрирования
 (13)
(13)
Вид решения уравнения (13) зависит от значения коэффициента а. Изменяющаяся по закону  сила упора винта в сумме с силой сопротивления Rx= kVх2 может давать суммарную тормозящую силу как возрастающую при а > 1, так и снижающуюся при а <1. При его значении равном нулю уравнение (13) приводится к уравнению (4) с соответствующим решением (6) и (7).
сила упора винта в сумме с силой сопротивления Rx= kVх2 может давать суммарную тормозящую силу как возрастающую при а > 1, так и снижающуюся при а <1. При его значении равном нулю уравнение (13) приводится к уравнению (4) с соответствующим решением (6) и (7).
Значение максимальной силы упора винта можно получить расчетным путем, а также определить из натурных наблюдений. Расчетный способ получения  заключается в определении силы упора изолированного винта (на швартовых) Ршв (без учета влияния корпуса на работу винта) и коэффициента, учитывающего взаимодействие корпуса и винта, получившего название коэффициента усиления упора Суу. Он зависит от соотношения между площадью диска винта и площадью погруженной части мидель-шпангоута. Для расчета значения Ршв применяют следующую формулу
заключается в определении силы упора изолированного винта (на швартовых) Ршв (без учета влияния корпуса на работу винта) и коэффициента, учитывающего взаимодействие корпуса и винта, получившего название коэффициента усиления упора Суу. Он зависит от соотношения между площадью диска винта и площадью погруженной части мидель-шпангоута. Для расчета значения Ршв применяют следующую формулу
 (14)
(14)
где Кр – коэффициент упора винта на швартовых;  - плотность воды, кг/м2; n – частота вращения винта, об/с; Dв – диаметр винта, м.
- плотность воды, кг/м2; n – частота вращения винта, об/с; Dв – диаметр винта, м.
Коэффициент упора винта на швартовых определяется по формуле

где θ - дисковое отношение винта; Н - шаг винта, м; H/Dв - шаговое отношение; Z - число лопастей винта.
Коэффициент усиления упора Суу определяют по формуле
 , (15)
, (15)
где  - площадь погруженной части мидель-шпангоута, м2; Аd - площадь диска винта, равная
- площадь погруженной части мидель-шпангоута, м2; Аd - площадь диска винта, равная  /4.
/4.
Значение  рассчитывают по формуле
рассчитывают по формуле
 (16)
(16)
где  - коэффициент полноты мидель-шпангоута.
- коэффициент полноты мидель-шпангоута.
Экспериментально силу упора винта определяют следующим образом. В момент начала вращения винта на задний ход замечают начальную скорость активного торможения VН (падение скорости от V0 до VН происходит за счет пассивного торможения) и пускают секундомер, руль ставят прямо, записывают частоту вращения винта. В момент остановки судна останавливают секундомер, и получают значение tIII. После этого, методом последовательных приближений по формулам (19), (21) или (23), подбирают значение аэ и рассчитывают экспериментальное значение силы упора винта по формуле
 . (17)
. (17)
Для этого же состояния судна при тех же параметрах движения производят расчет  по формулам (14–16) и определяют значение коэффициента, для уточнения расчетного значения Рmax для состояний судна, отличных отих величин при эксперименте, по формуле
по формулам (14–16) и определяют значение коэффициента, для уточнения расчетного значения Рmax для состояний судна, отличных отих величин при эксперименте, по формуле
 (18)
(18)
При коэффициенте а = 1 решение уравнения (13) будет иметь вид
 , (19)
, (19)

 . (20)
. (20)
При коэффициенте а < 1 решения уравнения (13), с учетом обозначения
 , будут иметь вид:
, будут иметь вид:
 , (21)
, (21)
 |
 . (22)
. (22)
При коэффициенте а >1 решения уравнения (13), с учетом обозначения  , будут иметь вид:
, будут иметь вид:
 , (23)
, (23)
 . (24)
. (24)
В зависимости от соотношения скорости хода перед началом снижения Vo и скорости уверенного реверсирования Vpев (т.е. скорости при которой главный двигатель уверенно запускается на задний ход), общее время и путь активного торможения будут рассчитываться различным образом (рис. 4).
Полное время и путь в полном цикле активного торможения
 (25)
(25)
При Vo > Vpeв значение пути первого периода рассчитывают как обычно S' = Vo • t'. Во время второго периода будет происходить пассивное торможение до тех пор, пока скорость не упадет до Vрeв, а расчет пути произведем по формуле (7), подставляя вместо Vк = Vpeв.
При Vo < Vрев расчет пути первого периода производится аналогично предыдущему случаю, а время второго периода определяется техническими характеристиками главного двигателя и равно времени запуска двигателя на задний ход. Для ДВС, в соответствии с правилами технической эксплуатации, оно равно t'' =15 секунд. С учетом этого путь второго периода рассчитывают по формуле S" = Vo× t".
Графики зависимости V(t) и S(t) (рисунок 5) достаточно подробно описывают процесс маневрирования, однако их требуется большое количество для полной характеристики динамики судна, как объекта управления (около 18 листов по 5 характеристик на каждом).
Выборка данных о времени и пути торможения на мостике практически исключена, поскольку сам процесс их получения занимает достаточно много времени, которое соизмеримо со временем маневрирования и необходимые данные запаздывают к моменту принятия решения. Поэтому такой вид представления рекомендуется при проведении научно-исследовательских работ и в учебном процессе в морских учебных заведениях.
 |
Рисунок 5 -График зависимости скорости и пути торможения от времени

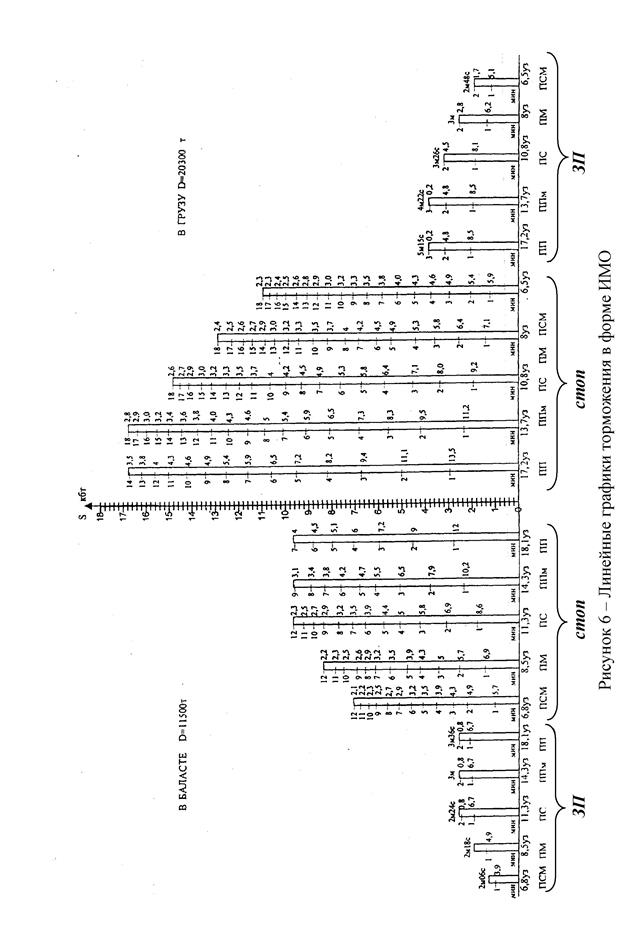
Линейные графики ИМО (рисунок 6) обладают той же информативностью, что V(t) и S(t). Однако они неудобны в работе из-за трудности интерполяции при выборке t и V на нелинейной шкале. Кроме того, они громоздки, требуется 5 листов по 20 характеристик на каждом. Несмотря на то, что они рекомендованы ИМО и требуется их наличие на судне, трудоемкость процесса выборки и большое их количество, отсутствие данных для назначаемых режимов, по-видимому, делают нецелесообразным, а иногда и невозможным, их использование на мостике.
Графиков зависимости времени t(V) и пути S(V) от начальной скорости при различных режимах работы машины на задний ход (рисунок 7.), требуется 6 листов по 8 характеристик на каждом.
Они удобны для выбора при назначении безопасной скорости, не требуется градация скоростей переднего хода. Достаточно подробны, однако выборка данных на мостике затруднена, из-за необходимости интерполяции.
Процесс разгона описывается дифференциальным уравнением
 . (26)
. (26)
Для упрощения решения дифференциального уравнения (26) при переходных режимах необходимо ввести дополнительное допущение, что назначенная сила упора движителя устанавливается мгновенно, в момент подачи команды, и равна новому режиму движения. Такое допущение можно сделать потому, что переходные процессы в двигателях происходят значительно быстрее, чем изменение скорости хода.
По окончании разгона, когда судно будет двигаться с установившейся скоростью Vycт, сила инерции равна нулю, и уравнение (26) принимает вид
 (27)
(27)
Подставив (27) в (26) получим дифференциальное уравнение разгона
 . (28)
. (28)
 |
Вид решения уравнения (28) зависит от того, из какого начального состоя

|
 (29)
(29)
 (30)
(30)
Полученные формулы (29) и (30) позволяют получить время и путь разгона судна из неподвижного состояния до заданной установившейся скорости. Однако процесс разгона длится достаточно долго (при Vx ® Vуст tpзг и Spзг стремятся к бесконечности). Для того чтобы разрешить получающуюся неопределенность, будем считать процесс законченным, когда скорость движения Vx достигает 0.95 Vуст. Указанное допущение удовлетворяет практические потребности судовождения, поскольку точность определения места судна и показаний лага в совокупности лежат в указанных пределах. С учетом этого допущения формулы (29) и (30), для расчета конечных значений пути и времени разгона, упрощаются и принимают вид
 (31)
(31)
 . (32)
. (32)
Процессразгона от произвольной скорости V1 до значения Vуст описывается дифференциальным уравнением (28),с пределами интегрирования от V1 до Vyст. Тогда формулы для расчета пути и времени разгона принимают вид
 (33)
(33)
 (34)
(34)
С учетом того, что процесс разгона от скорости V1 до Vycт также длится продолжительное время, выражения для расчета конечного пути и времени разгона до 0.95 Vуст упростятся и принимают вид
 (35)
(35)
 (36)
(36)
Время разгона от ППм до ПП является технической характеристикой двигателя судна. В зависимости от его типа продолжительность такого периода составляет от 25 до 45 мин., а для крупнотоннажных судов до 2-х часов. Поэтому при подсчете пути разгона скорость можно считать линейно нарастающей от ППм до ПП, а путь рассчитать по средней ее величине.
Процесс изменения скорости судна за счет уменьшения числа оборотов главного двигателя или силы упора движителя от высшей ступени к низшей получил название подтормаживание. При этом процесс движения судна описывается дифференциальным уравнением (24), с интегрированием от текущей скорости V 1 до Vуст. В результате получим формулы для расчета времени tптр и пути Sптр подтормаживания

 (37)
(37)
Учитывая, что процесс подтормаживания занимает продолжительное время, его можно считать законченным когда значение текущей скорости Vx равно 1.05 Vycт. Подставив его значение в формулы (37), получим формулы для расчета конечных значений пути и времени подтормаживания
|
При расчете времени подтормаживания из ходового режима необходимо учитывать время перевода главной силовой установки в маневренный режим. По приведенным формулам можно рассчитать время и путь, проходимый судном за период подтормаживания от ППм до ПСМ. Перевод до режима «Стоп» можно рассчитать по формулам пассивного торможения и считать его частным случаем подтормаживания.
2.3. Характеристики управляемости.
Управляемостью называется качество судна, позволяющее двигаться по заданной траектории или менять направление движения в соответствии с воздействием средства управления (руль, поворотная насадка и др.).
Управляемость зависит как от свойств самого судна, определяемых комплексом корпус-рулевое устройство-винт, так и от внешних условий - ветра, волнения, а также глубин и рельефа дна при плавании на мелководье, глубины и ширины канала при плавании в узкостях.
Судно может также потерять способность управляться под влиянием ветра и волнения в зависимости от их направления по отношению к диаметральной плоскости. Следует отметить также, что в условиях ветра управляемость судна существенно зависит от отношения его скорости к скорости ветра, так как боковая сила, создаваемая рулевым устройством (РУ), примерно пропорциональна квадрату скорости потока, в котором находится рабочий орган РУ, а поперечная аэродинамическая сила пропорциональна квадрату скорости ветра. Влияние скорости на управляемость проявляется только при ветре.
Управляемость характеризуется двумя свойствами судна - устойчивостью на курсе и поворотливостью.
Устойчивость на курсе. Устойчивостью на курсе называется способность судна сохранять заданное направление прямолинейного движения. Различают два вида устойчивости: теоретическую (автоматическую) и эксплуатационную.
Под теоретической устойчивостью подразумевается способность судна удерживаться на постоянном курсе без воздействия рулевого устройства. На практике такой устойчивости не встречается. Реальные суда бывают либо теоретически неустойчивыми (когда после прекращения действия возмущения судно входит в самопроизвольную циркуляцию), либо не асимптотически устойчивыми (когда после прекращения действия возмущения угловая скорость судна стремится к нулю).
Эксплуатационной устойчивостью называется способность судна сохранять заданное направление движения с помощью перекладок руля. Очевидно, что эксплуатационной устойчивостью должно обладать каждое судно.
Поворотливость. Поворотливостью называется способность судна изменять направление движения и двигаться по траектории заданной кривизны. Поворотливость зависит от многих условий. Главными из них являются:
1) характеристики средства управления;
2) характеристики корпуса судна;
3) внешние условия.
Главным средством управления на подавляющем большинстве морских судов является рулевое устройство, рабочим органом которого является руль (иногда поворотная насадка). К характеристикам руля относятся его размеры, форма и размещение.
Размер руля определяется его площадью, которую принято выражать по отношению к произведению длины судна на осадку(L•T) в виде коэффициента
A=L×T / Sр, (40)
где Sp -площадь руля; А - коэффициент, выбираемый при проектировании судов в зависимости от величины, назначения и района плавания судна. Для морских судов А = 40-85.
Форма руля характеризуется величиной, называемой относительным удлинением руля lp, которая рассчитывается по формуле:
 , (41)
, (41)
где: h - высота руля по баллеру; Sp - площадь пера руля.
Под размещением руля подразумевается его расположение относительно движителя (струи от движителя).
Влияет на поворотливость и способ соединения руля с корпусом: является ли руль подвесным или устанавливается за рудерпостом.
При отклонении руля от диаметральной плоскости на нём возникает боковая гидродинамическая сила. Иногда на судах вместо руля устанавливается направляющая насадка на винт, скреплённая с вертикальным баллером, с помощью которого её можно поворачивать в горизонтальной плоскости до 30-350 вправо и влево.
Боковая сила, возникающая на насадке, примерно на 40-50% выше, чем на пере руля, имеющем те же размеры (в проекции на ДП) и расположенном в винтовой струе. Это объясняется тем, что перекладка насадки обеспечивает более интенсивное отклонение потока от винта, чем перекладка руля.
Большое значение для поворотливости судна имеют параметры его корпуса, характеризуемые отношениями L/B и коэффициентами общей полноты dоп, а также форма оконечностей судна (степень подреза оконечностей) и дифферент.
На одновинтовых судах циркуляции вправо и влево могут существенно отличаться из-за несимметричного влияния струи от винта.
Из рассмотренного выше очевидно, что устойчивость на курсе и поворотливость являются противоположными качествами - при улучшении устойчивости на курсе поворотливость ухудшается, и наоборот. В то же время оба этих качества являются полезными, поэтому при проектировании судов стремятся найти, в зависимости от типа и назначения судна, целесообразное сочетание этих качеств. На судах, которым по характеру их работы предстоит частое маневрирование в стеснённых условиях, для повышения поворотливости нередко устанавливают средства активного управления (САУ) [9].
При движении судна с переложенным рулём, центр тяжести описывает траекторию, называемую циркуляцией. При этом нос судна отклоняется внутрь циркуляции за счет дрейфа.
Подводную часть корпуса судна обычно рассматривают как крыло, двигающееся в воде, на котором возникает подъёмная сила. Поперечная составляющая гидродинамической силы RгY и является подъёмной силой корпуса, рассматриваемого как крыло. Значение этой силы, распределённой по длине корпуса судна, пропорционально углу натекания потока воды на него, т.е. углу дрейфа. При движении с постоянным по длине корпуса углом дрейфа (это бывает при движении близком к прямолинейному) точка приложения равнодействующей подъёмной силы смещена к передней кромке крыла, т.е. к носовой части судна.
Циркуляция характеризуется линейной и угловой скоростями, радиусом кривизны и углом дрейфа. Эти характеристики не остаются постоянными в процессе движения по криволинейной траектории, поэтому процесс циркуляции принято делить на три периода.
Первый период - маневренный -продолжается в течении времени от подачи команды на перекладку руля до его перемещения на заданный угол. Второй период – эволюционный - начинается с момента окончания перекладки руля и заканчивается, когда характеристики циркуляции примут установившиеся значения. Третий период – установившийся - начинается с момента окончания второго периода и продолжается до тех пор, пока руль остаётся в переложенном положении [4-12].
За начало циркуляции принимается момент подачи команды на перекладку руля. Переложенный на угол d руль, как и всякое крыло, развивает подъёмную силу Rp, под влиянием поперечной составляющей которой корпус испытывает приложенную в центре тяжести G силу Rpy и момент Mp относительно вертикальной оси Z, как показано на рисунке 8.
 |
Рисунок 8 - Начальное смещение корпуса судна
В первый период после начала циркуляции под влиянием поперечной силы Rpy возникает угол дрейфа и ЦТ судна приобретает движение во внешнюю сторону циркуляции, происходит обратное смещение, при этом на корпусе также появляется подъёмная сила – поперечная гидродинамическая сила Rгy, направленная внутрь циркуляции. Точка приложения этой силы смещена в нос от ЦТ, а момент этой силы Mг в этом периоде имеет тот же знак, что и момент руля Mp, поэтому угловая скорость начинает быстро возрастать.
В дальнейшем под влиянием поперечной силы Rгy траектория ЦТ начинает постепенно искривляться в сторону перекладки руля, т.е. радиус начинает уменьшаться.
При движении ЦТ по криволинейной траектории каждая точка по длине судна описывает относительно общего центра циркуляции О свою траекторию, радиус кривизны которой отличается от Rц, как это показано на рис.9.

При этом каждая такая точка имеет свой угол дрейфа, значение которого возрастает по мере удаления в сторону кормы. В нос от ЦТ углы дрейфа соответственно уменьшаются. Если же из центра циркуляции О опустить перпендикуляр на диаметральную плоскость (ДП), то в полученной точке будет полюс поворота (ПП), угол дрейфа в котором равен нулю. Эта точка носит название центра вращения или полюса поворота.
Полюс поворота при циркуляции для большинства судов располагается вблизи носовой оконечности - на расстоянии примерно 0.4 длины судна от центра тяжести, принимаемого на мидель-шпангоуте, поэтому угловая скорость начинает быстро возрастать.
Угол дрейфа ЦТ судна на циркуляции определяется по формуле
 (42)
(42)
где  - расстояние полюса поворота от центра тяжести.
- расстояние полюса поворота от центра тяжести.
Для произвольной точки а угол дрейфа будет
 (43)
(43)
где  - расстояние от точки а до центра тяжести (в корму знак «-»).
- расстояние от точки а до центра тяжести (в корму знак «-»).
На судах, имеющих крутую циркуляцию, угол дрейфа может достигать 200 и более.
Как уже отмечалось, подъёмная сила пропорциональна углу атаки, а так как углы дрейфа возрастают по длине корпуса в сторону кормы, то точка приложения поперечной гидродинамической силы Rгy по мере искривления траектории смещается в сторону кормы, а момент этой силы Мг постепенно уменьшаясь меняет знак и начинает действовать противоположно моменту руля Мр, т.е. становится демпфирующим. Рост угловой скорости при этом замедляется, а когда моменты Мр и Мг становятся равными по абсолютной величине, угловая скорость стремится к установившемуся значению wуст .. Благодаря сопротивлению переложенного руля (сила Rpx) и некоторому увеличению сопротивления корпуса при движении с углом дрейфа, а также проекции Rцх центробежной силы, линейная скорость судна VG постепенно уменьшается, стремясь к некоторому значению Vуст ..
Чем лучше поворотливость, т.е. чем большую кривизну имеет траектория, тем больше снижается скорость на циркуляции. В среднем, на крупнотоннажных морских судах при повороте на 900 скорость снижается, приблизительно на 1/3, а при повороте на 1800 – вдвое.
Как вытекает из теоретических представлений и подтверждается практическими наблюдениями на управляемость судна оказывают влияние следующие величины: отношение длины судна к его ширине L/B, отношение осадки к длине T/L, коэффициент общей полноты dоп, форма оконечностей судна, дифферент, площадь, форма и размещение руля.
Рассмотрим кратко влияние каждой из перечисленных величин.
Влияние отношения L/B. Увеличение L/B приводит к росту гидродинамической силы Rгy, что ведёт к уменьшению угла дрейфа на циркуляции и, следовательно, к сохранению высокой линейной скорости, так как сопротивление воды при малых углах дрейфа возрастает незначительно. Кроме того, при увеличении L точка приложения силы Rгy смещается в сторону кормы, при этом увеличивается демпфирующее действие момента Mг, входящего в третье уравнение системы (1), что приводит к уменьшению угловой скорости w (скорость изменения курса). Таким образом, увеличение L/B значительно ухудшает поворотливость судна.
Влияние отношения T/L. Увеличение T/L тоже приводит к росту силы Rгy, но в то же время точка приложения её смещается в сторону носа, что уменьшает демпфирующее действие момента Mг. В результате при увеличении отношения T/L поворотливость изменяется незначительно.
Влияние коэффициента dоп. На поворотливость судна значительно влияет коэффициент продольной полноты j, который выражается отношением dоп к коэффициенту полноты мидель-шпангоута b Ä, т.е .j=dоп / b Ä. Увеличение j приводит к уменьшению силы Rгy и уменьшению демпфирующего момента Mг. Поэтому увеличение dоп значительно улучшает поворотливость.
Влияние формы носовой и кормовой оконечностей. Значительное влияние на поворотливость оказывает степень подреза штевней, критерием которой является коэффициент полноты диаметральной плоскости. Особенно сильно влияет степень подреза кормы. Чем больше кормовой подрез, тем больше смещается в нос точка приложения силы Rгy, что приводит к улучшению поворотливости. С другой стороны, даже небольшое увеличение площади дейдвуда резко ухудшает поворотливость.
Степень подреза кормы можно охарактеризовать коэффициентом полноты площади погруженной части диаметральной плоскости sк, который рассчитывается с учётом величины кормового подреза по формуле
 , (44)
, (44)
где fk -площадь кормового подреза, площадь фигуры, заключённой между кормовым перпендикуляром (осью баллера руля) и контуром кормовой оконечности (снимается в масштабе с чертежа бокового вида), м2; L - длина между перпендикулярами, м; T - средняя осадка, м.
Носовой подрез влияет на поворотливость значительно меньше. Если носовой подрез велик как, например, у ледоколов, то поворотливость несколько ухудшается.
Влияние дифферента. Дифферент судна вызывает смещение точки приложения Rгy. Дифферент на нос улучшает поворотливость, но ухудшает устойчивость на курсе, т.е. увеличивает рыскливость. Дифферент на корму ухудшает поворотливость, но увеличивает устойчивость на курсе.
Влияние площади, формы и размещение руля. Форма руля, как уже отмечалось, характеризуется обычно его относительным удлинением lр=h2/Sр. Увеличение lр при неизменной его площади Sр увеличивает подъёмную(боковую) силу руля Rрy, что приводит к улучшению поворотливости.
Увеличение площади руля Sр также увеличивает подъёмную силу, но в то же время увеличивает и демпфирующее действие руля. Таким образом, увеличение площади руля приводит к улучшению поворотливости при больших углах перекладки, а при малых отклонениях руля поворотливость ухудшается.
Расположение руля относительно винта (винтов) значительно влияет на поворотливость. Если руль расположен в винтовой струе, то скорость натекания воды на руль увеличивается, что вызывает значительное улучшение поворотливости. Эффект винтовой струи проявляется тем сильнее, чем большая площадь руля попадает в поток от винта. Этот эффект проявляется особенно сильно в режиме разгона судна, а по мере приближения скорости к установившемуся для данного режима, его влияние уменьшается.
В зависимости от способов определения, получения и представления характеристик поворотливости различают (рис.10): по способу определения - экспериментальный, расчетный, экспериментально-расчетный; по способу получения – из натурных наблюдений, модельных испытаний в опытовых бассейнах, аналитический и эмпирический; по способу представления данных- в виде графиков и таблиц отрезков, графиков и таблиц перпендикуляров, графиков кривых траекторий ЦТ при циркуляции, таблиц элементов циркуляции.

Рисунок 10 - Классификация методов определения
характеристик поворотливости
Для характеристики поворотливости судна в период установившейся циркуляции используют диаграмму управляемости [4-10], которую представляют обычно в виде зависимости v(d), приведенную на рисунке 11.
Диаграмма управляемости теоретически обладает симметрией, однако, на практике она нарушается из-за наличия боковой силы винта, обусловленной неравномерностью попутного потока. Поведение судна при движении постоянным курсом определяется видом начального участка диаграммы управляемости. Приведенная на рисунке 11 диаграмма характерна для теоретически неустойчивого судна. Область неустойчивости существует только вблизи начала координат. Ее определяют углом обратной перекладки руля ± dро [3-6] и угловой скоростью обратной поворотливости vо.

Рисунок 11 - Диаграмма управляемости теоретически неустойчивого судна
2.4. Определение характеристик поворотливости из эксперимента
Экспериментальный способ определения характеристик поворотливости более трудоемок, по сравнению с определением характеристик торможения, поскольку требует более точных способов траекторных измерений и значительной продолжительности по времени их выполнения.
Для получения данных о поворотливости судна предусматривают выполнение следующих маневров:
– циркуляция;
– спираль (прямая и обратная);
– симметричный зигзаг;
– несимметричный зигзаг.
Программа испытаний и ее объем зависят от того, какие данные о характеристиках поворотливости необходимо получить. Если необходимо получить полное представление о них, то значения скорости и углов перекладки руля определяется количеством характерных точек, которых достаточно для построения надежных зависимостей. Обычно подробный объем испытаний проводят для головных судов серии. Для последующих судов ограничиваются меньшим числом контрольных маневров, позволяющих судить о тождественности маневренных характеристик головного и типового судов.
Последовательность выполнения испытательных маневров существенного значения не имеет. Рекомендуется начинать испытания с наибольших скоростей хода. Перекладку руля в процессе испытаний производят как на правый, так и на левый борт. Это обусловлено тем, что элементы поворотливости зависят от боковых сил, возникающих на винте (винтах), и технологической не симметрии судна.
Маневр “циркуляция” обычно выполняют для углов перекладки руля на 15 и 35 градусов при максимальной, средней и малой скоростях движения. На судах с ДВС при больших скоростях движения возникают перегрузки двигателей. Чтобы не изменять положение регуляторов подачи топлива рекомендуется испытания проводить при маневренном режиме.
Маневр “циркуляция” состоит из трех периодов: маневренный; эволюционный; установившийся. Маневренный период начинается от момента подачи команды на перекладку руля до момента окончания перекладки руля на заданный угол. Эволюционный период начинается, от момента окончания перекладки руля и заканчивается, когда элементы движения судна перестанут изменяться во времени. Установившийся период начинается с момента окончания второго периода и длится все время, пока руль находится в переложенном положении. Между вторым и третьим периодом резкой границы провести не представляется возможным, поэтому в практике судовождения считают, что установившееся движение наступает при повороте судна на 1800.
По результатам выполнения маневра получают значения геометрических элементов кривой циркуляции  (d),
(d),  (d), Dт(d) и Dy(d) и зависимости времени поворота от угла курса при различных скоростях и углах перекладки руля.
(d), Dт(d) и Dy(d) и зависимости времени поворота от угла курса при различных скоростях и углах перекладки руля.
Маневр “Спираль” выполняют в следующей последовательности: при движении судна с постоянным курсом и скоростью перекладывают руль на 300 вправо и удерживают в таком положении до тех пор, пока не установится постоянное значение угловой скорости vс. При достижении постоянного значения vсi уменьшают угол перекладки руля на 50 и выдерживают его в таком положении до момента достижения постоянного значения vсi +1. Процедуру повторяют до тех пор, пока руль не будет переложен на 50. В зоне перекладки ±50 угол изменяют на 10 или 20, как позволяет указатель положения пера руля. Маневр повторяют аналогично на левый борт (обратная спираль) до углов 300. В

