




Основные параметры гидроклина определяются по расчётной схеме сил, действующих на него в процессе работы (рис. 1.6).

Рис. 1.6. Схема сил, действующих на гидроклин
Сила, которую необходимо приложить к штоку клина для его продвижения в пропиле, при заданной грузоподъёмности клина РГ, зависит от угла заострения клина αГ и сил трения между самим клином и прикрывающими его пластинами для лучшего сцепления с древесиной (щеками).
Сила на перемещение клина в пропиле
 Н, (1.24)
Н, (1.24)
где αк – угол заострения клина (αк= 16…200), град;
φ – угол трения клина о щёки (угол между нормальной силой к щекам клина и силой трения), град;
КП – коэффициент, учитывающий потери на преодоление сил трения манжеты поршня о цилиндр и сил сопротивления возвратной пружины (КП= 0,8...0,9).
Угол трения определяется из уравнения
 , (1.25)
, (1.25)
где μ – коэффициент трения клина о щёки (μ= 0,2).
Диаметр поршня гидроцилиндра
 м, (1.26)
м, (1.26)
где рО – рабочее давление жидкости в гидросистеме привода клина (рО= 25...35мПа), мПа.
Ход штока гидроцилиндра
 , м, (1.26)
, м, (1.26)
где γ – угол поворота дерева от начального положения до начала свободного падения, град.
Угол поворота дерева
 , град., (1.27)
, град., (1.27)
где βп – угол наклона дерева, при котором оно начинает свободное падение (в среднем βп= 30), град.;
βнач – угол наклона дерева в исходном положении (βнач≤ -50), град.
Ширина клина определяется по допустимому напряжению смятия волокон
 , мПа,
, мПа,
где FK – площадь опорной поверхности клина, м2;
[ σСЖ ] – допустимое напряжение на сжатие вдоль волокон (табл. 1.6), мПа.
Ширина клина
 , м, (1.28)
, м, (1.28)
где lP – длина рабочего участка клина, прижимаемого к стенкам пропила, м.
Мощность на привод гидроклина определяется исходя из времени нагнетания насосом рабочей жидкости на полный ход клина (времени передвижения клина)
 , кВт, (1.29)
, кВт, (1.29)
где υ – скорость движения поршня клина, м/с;
η – общий к.п.д. клина (η= 0,4).
Расход жидкости для обеспечения заданной скорости движения клина составляет
 , м3/с. (1.30)
, м3/с. (1.30)
Время нагнетания насосом рабочей жидкости  , с.
, с.
Определение нагрузок на валочных механизмах ЗСУ лесозаготовительных машин производится на основе составленной расчётной схемы сил, действующих на захватно-срезающее устройство в процессе валки дерева. Валка дерева для ЗСУ с валочным рычагом ниже плоскости пиления (машина ЛП-17А) (рис. 1.7) производится действием рычага на пень дерева и натягом манипулятора, в результате чего происходит поворот корпуса устройства вместе с захваченным деревом. Усилие действия рычага определяется возможным усилием на гидроцилиндре привода относительно точки вращения рычага
 ,
,
где А1 и А2 – плечи действия сил на гидроцилиндре и рычаге, соответственно, м.
Необходимые усилия на валочных механизмах определяются уравнением моментов относительно точки вращения дерева – центра недопила
 , (1.31)
, (1.31)
где ММ, МР – моменты, действующие на дерево со стороны манипулятора и валочного рычага, Н∙м.
Подставляя значения моментов в уравнение 1.31 и учитывая, что усилия при валке дерева преодолевают момент МОПР
 . (1.32)
. (1.32)
Усилие на гидроцилиндре валочного рычага определяется исходя из распределения нагрузок между ним и манипулятором. При этом необходимо соблюдать условия, чтобы давление жидкости не превосходило 10…15 МПа и размеры самих гидроцилиндров были бы наименьшие.
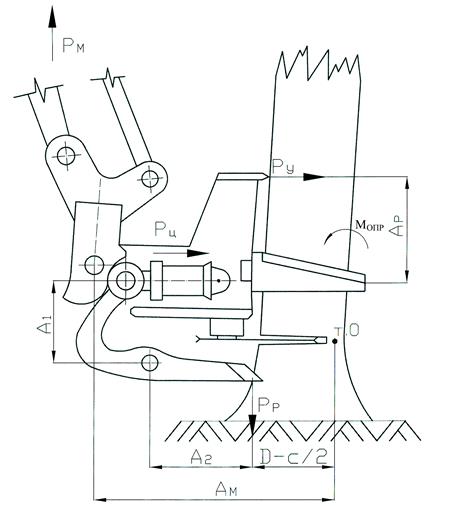
Рис. 1.6. Схема сил, действующих на ЗСУ валочно-трелёвочной машины в процессе направленной валки
Таким образом, усилие на гидроцилиндре валочного рычага составляет
 , Н (1.33)
, Н (1.33)
Диаметр гидроцилиндра определяется в зависимости от того поршневой или штоковой полостью работает гидроцилиндр. При работе поршневой полостью
 ,
,
при работе штоковой полостью

 ,
,
где dЦ и dШ – диаметры поршня и штока гидроцилиндра, м; р – давление жидкости, Ра.

Рис. 1.8. Схема сил, действующих на харвестерную головку в процессе направленной валки
Для валочных машин без дополнительных валочных механизмов (ВТМ ЛП-49, ЛП-58, ЛЗ-235) направленная валка производится только с помощью натяга ЗСУ манипулятором.
Расстояние между верхним упором и рычагами захватов определяют возникающие на них усилия сцепления ЗСУ к стволу дерева и составляют пару сил, равную опрокидывающему моменту. Горизонтальное усилие на захватных рычагах составляет
 (1.33)
(1.33)
Для харвестерной головки расчётная схема действующих нагрузок при валке дерева представлена на рис. 1.8. Валка дерева головкой производится при помощи гидроцилиндров путём её поворота вокруг оси крепления рамы при одновременном допиливании недопила. Поворот головки под действием гидроцилиндров приводит к нажиму на ствол дерева верхнего упора, которым служит неподвижным ножом верхнего сучкорезного захвата.
Уравнение моментов валки дерева харвестерной головкой подобно уравнению 1.32
 ,
,
где n – количество гидроцилиндров наклона головки (в большинстве случаев n= 2).
Горизонтальные усилия на рычагах сучкорезных захватов и протаскивающих вальцов зависят от их места расположения на головке и статически неопределимы. По правилам определения реакций в статически неопределимых системах горизонтальные усилия определяются из системы уравнений
 ,
,
где
 .
.
После преобразования горизонтальные усилия на рычагах по рис. 1.7 составят
 .
.
При заданном давлении р0 в гидроприводе технологического оборудования машины диаметр гидроцилиндров наклона головки (рис. 1.7) или валочного рычага (рис. 1.6) определяется из выражения

В некоторых конструкциях технологического оборудования валочных машин (например ЛП-49) направленная валка дерева может производится только за счёт натяжения ЗСУ манипулятором.

