




5.1 Назначение и состав.
Аппаратура стабилизации и управления ракеты(АСУР) предназначена:
· Для осуществления во взаимодействии с аппаратурой носителя, автоматизированной подготовки ракеты к применению при нахождении ее на пусковой установке (ПУ) (на этапе совместного движения) и производства других пусковых операций;
· Для управления процессами функционирования и взаимодействия систем ракеты на этапе автономного полета после старта с ПУ, включая процессы стабилизации и управления движением ракеты.
Аппаратура стабилизации и управления включает в себя:
· Инерциальную систему управления (ИСУ);
· Четыре рулевых привода (РП);
· Радиовысотометр (РВ).
5.2 Работа
АСУР входит в состав бортовой системы управления (БСУ), функциональные связи и структура которой изменяются в зависимости от этапа и стадии функционирования. На этапе совместного движения до начала предстартовой подготовки (ПП) ракеты все составные части и элементы БСУ обесточены. Между ракетой и носителем осуществляется лишь одна функциональная связь: с момента выбора оператором в качестве оружия ракеты Х-35 и поступления от аппаратуры системы управления (АСУ) на вход электроцепи блокировок команды «КБ» (контроль блокировок) с выхода этой цепи при ее исправном состоянии выдается сигнал «Признак» в форме напряжения -27 В.
Выдача и контроль этого сигнала осуществляются непрерывно до момента старта ракеты. При отсутствии сигнала «Признак» выдача электропитания в ракету запрещается.
На стадии ПП, которая начинается с момента подачи в ракету электропитания, БСУ во взаимодействии с АСУ организует момент ее проведения.
РП на стадии ПП не функционируют. В то же время имеются развитые функциональные связи между БСУ ракеты и АСУ, которые работают как единый автоматизированный комплекс, действующий при ограниченном вмешательстве оператора.
ПП включает в себя операции:
· Встроенного контроля систем ракеты с формированием по его окончанию сигнала «Исправность» в форме напряжения +27 В;
· Выхода РВ на режим контроля и работы его в этом режиме с выдачей контрольных параметров в ИСУ в цифровой форме;
· Функционирования АРГС с последующим проведением автоматического бортового контроля (АБК) и выдачей по его окончанию сигнала «Исправ. АРГС» в ИСУ в цифровой форме;
· Контроля подсистем ИСУ с последующим выполнением начальной выставки (НВ) инерциальной навигационной системы (ИНС) в горизонт и по азимуту по сигналам, поступающим от АСУ в цифровой форме;
· Включения и выхода на режим электронасоса топливной системы ракеты.
Длительность ПП составляет 60с.
Правильность функционирования ракеты на стадии ПП и последующих стадиях контролируется АСУ автоматически по выдаваемым сигналам:
· Приведение в рабочее положение консолей крыльев, рулей и стабилизаторов;
· Подача пневмопитания в пневмоусилители РП;
· Включение программы выработки разовых команд ИСУ;
· Снятие первой ступени предохранения ПДУ;
· Наложение запрета на режим АБК АРГС;
· Открытие клапана на входе топливной магистрали МД с одновременным закрытием клапана пролива топлива.
В последующем управление процессами функционирования систем ракеты передается ИСУ, которая формирует и выдает в заданной временной и логической последовательности необходимые команды управления. При этом отсчет временных интервалов производится программно, в большинстве случаев от момента принятия команды «Отделение».
По командам, формируемым ИСУ на стартовом участке, производятся:
· Стабилизация движения ракеты относительно центра масс;
· Перевод РВ в рабочий режим;
· Отделением стартовой ступени ракеты после окончания работы СД;
· Запуск МД.
Следующая стадия функционирования систем ракеты на этапе автономного полета – управляемый полет
На стадии управляемого полета продолжается выход на режим МД. При достижении турбиной МД частоты вращения, равной 80% от установившегося максимального значения, напряжение на выходе генератора МД возрастает до величины, при которой происходит выдача из БВРК сигнала «СГГ» (сигнала готовности генератора), по которому электроавтоматика отключает батареи от сети электропитания ракеты. В дальнейшем электропитание систем ракеты постоянным напряжением 27 В происходит от генератора МД через БВРК.
Сигнал «СГГ» использован также для снятия второй ступени предохранения ПДУ через 5-10 с после отделения ракеты от носителя.
При достижении давления воздуха на выходе из компрессора МД величины давления перехода пневмопитание РП начинает осуществляться от компрессора.
Время выхода МД на режим 0,8 n max составляет от 2,6 до 4,5 с, на режим 0,98 n max - от 6 до 8 с, на режим максимальной тяги – не превышает 120 с.
Управление движением ракеты производится в двух плоскостях – бокового и продольного движения, что соответствует определению координат движения ракеты и цели в двух взаимно перпендикулярных плоскостях XOZ и XOY инерциальной системы координат ракеты.
Алгоритм управления в плоскости продольного движения, реализуемый ИСУ, предусматривает последовательное решение следующих задач:
· Программный вывод ракеты на высоту маршевого полета H1 = 10…15м
· Стабилизацию высоты H1;
· Снижение высоты до величины H2 = 3..5 м после коррекции координатной информации о местоположении цели по данным АРГС;
· Стабилизацию высоты H2.
Алгоритм управления в плоскости бокового движения обеспечивает:
· До обнаружения и взятия на автосопровождение цели АРГС – вывод ракеты в зону поиска цели;
· После взятия цели на автосопровождение АРГС – сопровождение ракеты на цель по сигналам АРГС.
· Включение АРГС в режим поиска цели осуществляется по команде «КВГ» (команда включения головки), формируемой ИСУ в момент выполнения суммы условий:
o Генератор МД на режим вышел;
o Ракета по высоту H1 вышла;
o Разворот ракеты в направлении заданной цели в плоскости бокового движения произошел;
o Заданная дальность цели Двкл достигнута.
Контроль выполнения первого из названных условий осуществляется ИСУ косвенным образом – по временному интервалу, отсчитываемому от момента выдачи команды на запуск МД. Этот интервал принимается равным
τ расч.ген. = (4,5 + 0,3 Но)с,
где Но – высота старта ракеты в километрах.
Через 2с после выдачи «КВГ» ИСУ выдает в АРГС массив цифровых данных, содержащий информацию о зоне поиска цели и методе поиска.
Завершающими операциями функционирования ракеты являются снятие последней ступени предохранения ПДУ по команде ИСУ, срабатывание контактных датчиков и боевой части (БЧ) в момент встречи ракеты с целью (преградой).
5.3. Инерциальная система управления (ИСУ)
Инерциальная система управления предназначена для формирования траектории вывода ракеты в заданный сектор поиска цели и реализации конечного участка траектории ракеты в горизонтальной плоскости на предельно малой высоте по информации АРГС, а также для стабилизации ракеты на заданной траектории.
ИСУ выполнена в виде моноблока, который включает в себя:
· Бортовую цифровую вычислительную машину (БЦВМ);
· Блок управления (БУ);
· Измерительный блок;
· Блок преобразующей электроники платформы;
· Блок преобразующей электроники датчиков угловых скоростей;
· Блок питания двигателей гироскопов;
· Блок сервисной электроники платформы;
· Устройство датчиков;
· Фильтр радиопомех;
· Три блока питания;
· Плату констант;
· Устройство связи.
БЦВМ предназначена для выполнения вычислений и выработки управляющих сигналов, необходимых для решения задач в соответствии с заложенной программой; электропитанием обеспечивается от бортовой сети ракеты через фильтр радиопомех(ФРП).
БУ предназначен для обмена информацией с БЦВМ, формирования управляющих сигналов и выдачи их на РП; в своем составе имеет цифроаналоговые преобразователи, устройство разовых команд, усилитель-корректор привода, цифровой делитель напряжения и другие узлы; связан с БЦВМ через мультиплексный канал обмена.
Измерительный блок представляет собой измерительное устройство, построенное по принципу трехосного индикаторного гиростабилизатора; в состав блока входят гироскопы, акселерометры, датчики углов гироскопов, датчики моментов гироскопов и преобразователь координат.
Блок преобразующей электроники платформы предназначен для преобразования сигналов датчики углов и акселерометров в двоичный код, чтения информации с платы констант и выдачи их в БЦВМ.
Блок преобразующей электроники датчиков угловых скоростей предназначен для формирования напряжения питания обмоток возбуждения датчиков угловых скоростей (ДУС), размещенных в устройстве датчиков, а также для усиления и преобразования их выходного напряжения; состоит из генератора опорного напряжения и фазочувствительного усилителя.
Блок питания двигателей гироскопов предназначен для формирования трехфазного напряжения специальной формы для питания двигателей гироскопов и выдачи сигнала опорной частоты для обслуживающей электроники ИСУ.
Блок сервисной электроники платформы формирует питающее напряжение ДУ гироскопов и токи управления, а также осуществляет фильтрацию, амплитудно-фазовое преобразование, усиление по напряжению и мощности сигналов стабилизации и арретирования платформы.
Блок питания предназначен для питания блоков ИСУ вторичными напряжениями постоянного и переменного тока, формируемыми из напряжения бортовой сети ракеты.
Коммутация блоков осуществляется через устройство связи.
5.4. Описание и работа ИСУ
Функционально ИСУ состоит из двух главных частей: инерциальной навигационной системы (ИНС) и системы управления (СУ).
5.4.1. ИНС.
ИНС предназначена для формирования и выдачи в СУ следующей информации:
· Углов курса ψn, крена γn, тангажа νn;
· Приращений кажущейся скорости ракеты ∆Vxk, ∆Vуk, ∆Vяk в платформенной системе координат (ПСК);
· Горизонтальных составляющих линейных скоростей Vx, Vz и координат Rx, Rz ракеты в навигационной системе координат (НСК);
· Высоты H и скорости ее изменения Ĥ полета ракеты над усредненной поверхностью;
· Параметров движения цели в НСК Rxц, Rzц,Vxц, Vzц.
Ошибка ИНС с учетом выставки за 400с полета δ≤ 2350 м.
НСК совпадает в точке старта ракеты с базовой системой координат (БСК) носителя. При этом, в процессе полета центр НСК остается неподвижным относительно земли, а вектор угловой скорости вращения ее осей совпадает по модулю и направлению с вектором угловой скорости вращения Земли.
ПСК совпадает с измерительными осями Ax, Ay, Az, установленных на гиростабилизированной платформе (ГСП).
ПСК и НСК в момент старта ракеты совпадают с плоскостью местного горизонта, а их ориентация в азимуте определяется известным угловым рассогласованием.
Конструктивно ИНС состоит из ГСП с тремя ортогонально установленными на ней акселерометрами и датчиками углов по осям карданова подвеса платформы и БЦВМ, реализующей необходимые алгоритмы обработки информации.
ГСП предназначена для стабилизации положения измерительных осей акселерометров, что обеспечивает моделирование НСК.
В качестве чувствительных элементов ГСП использованы два бескарданных трехстепенных гироскопа. ГСП стабилизируется по сигналам с ДУ двигателями стабилизации постоянного тока с большой крутизной моментной характеристики. Управление ГСП осуществляется путем подачи тока управления на соответствующие ДМ.
ГСП через ПТЧК и УКП выдает в БЦВМ в виде цифрового кода информацию об ускорении движения ракеты относительно ПСК и угловом положении ПСК относительно связанной системы координат (ССК) ракеты.
БЦВМ считывает с ПК заложенные константы и по полученной информации формирует по алгоритмам ИНС скорости управления, которые блоком сервисной электроники платформы преобразуются в токи управления ГСП. Контур стабилизации ГСП замыкается через блок сервисной электроники платформы.
ИНС имеет два режима работы - начальной подготовки и автономной работы.
Режим начальной подготовки предназначен для определения начальной ориентации НСК относительно БСК носителя (НВ) и приема параметров целеуказания (ЦУ) (скорость и координаты цели) и исходной информации для автономной работы ИНС (начальная скорость и компоненты вектора угловой скорости вращения Земли) с аппаратуры подготовки и пуска (АПП) носителя.
В процессе НВ осуществляется физическое приведение ГСП в плоскость местного горизонта путем подачи управляющих воздействий (ωx, ωz) на датчики моментов горизонтальных каналов гироскопов и математическое определение положения ПСК относительно БСК в азимуте путем расчета соответствующей матрицы ориентации.
При начальной подготовке АПП носителя передает в ИСУ следующую информацию:
· компоненты вектора угловой скорости вращения Земли;
· параметры азимутальной выставки;
· углы и синусы углов установки ракеты относительно носителя;
· горизонтальные составляющие вектора линейной скорости движения носителя;
· элементы матрицы перехода из БСК в ССК носителя;
· координаты и скорость цели;
· признак достоверности ЦУ.
Окончание процесса НВ и переход в режим автономной работы производится после приема признака, подтверждающего достоверность параметров ЦУ, но не ранее чем по истечении штатного времени готовности (60 с). Данная логика, позволяет организовать дежурный режим работы ИСУ.
В автономном режиме работы ИНС производит счисление текущих координат и скоростей движения ракеты и цели в НСК, определение высоты полета и скорости ее изменения над подстилающей поверхностью, выработки углов курса, крена, тангажа и сигнала коррекции по углу крена, а также приращений кажущейся скорости ракеты в ПСК.
Счисление координат и скоростей движения ракеты производится на основе измерений кажущихся ускорений акселерометрами. При этом выходной сигнал акселерометров преобразуется из непрерывной формы в дискретную с помощью ПТЧК и поступает в БЦВМ в виде вектора приращения кажущейся скорости в ПСК.
Для обеспечения выработки угла крена ракеты относительно плоскости местного горизонта определяется корректирующая добавка (γкор.) к углу крена, выдаваемого датчиком угла ГСП относительно ССК ракеты, которая вычисляется в БЦВМ на основе известной угловой скорости поворота ПСК относительно плоскости местного горизонта.
Для обеспечения работоспособности ИНС при угловых эволюциях ракеты, превышающих углы прокачки ГСП по курсу (±150°), предусмотрена возможность управления ГСП, что обеспечивает ее разворот по углу курса в сторону уменьшения углового рассогласования корпуса..
Информация о высоте и скорости изменения высоты полета ракеты над усредненной поверхностью выдается алгоритмом комплексирования (АК) с РВ. Эта информация используется в алгоритмах СУ для управления ракетой в продольной плоскости и стабилизации предельно малых высот. В АК производится комплексная обработка информации вертикального канала ИНС (показание вертикального акселерометра ГСП) и РВ (высота полета и признак исправности РВ), что обеспечивает требуемую точность стабилизации предельно малых высот как при исправном РВ, так и при его кратковременных отказах. На конечном участке полета при достижении заданного расстояния до цели начинает работать АК с АРГС. После захвата цели АРГС управление в боковой плоскости производится по передаваемой ею информации о координатах цели.
5.4.2. Система управления.
СУ - трехканальный регулятор, предназначенный для формирования управляющих воздействий на исполнительные органы (рули) ракеты, реализующих заданную траекторию полета. Параметры движения ракеты определяются законом формирования величин – разности между заданными и текущими значениями угловой скорости вращения ракеты вокруг осей Z, У, X, которые кинематически разводятся на четыре дифференциальных руля.
СУ включает в себя автопилот (АП) и БЦВМ, реализующую алгоритмы управления траекторным движением.
АП предназначен для формирования управляющих воздействий на рули ракеты, обеспечивающих устойчивость замкнутой системы "АП - ракета". Входными управляющими воздействиями замкнутой системы являются заданные управления, формируемые в алгоритмах управления траекторным движением.
АП имеет три канала: продольный (высоты), боковой (направления) и крена (элеронов).
В АП реализованы следующие законы управления:
· для продольного канала:
σв = ωzзад + Кν · ωz · WфТ(р), (5.1)
где
ωzзад - заданная угловая скорость по каналу тангажа;
Кν - передаточное число по угловой скорости тангажа;
ωz - угловая скорость колебаний ракеты по тангажу;
WфТ(р) - передаточная функция противоизгибного фильтра в канале тангажа;
· для бокового канала:
σн = ωyзад + Кψ · ωy · WфK(р), (5.2)
ωyзад - заданная угловая скорость по каналу курса;
Кψ - передаточное число по угловой скорости рыскания;
ωy - угловая скорость колебаний ракеты по курсу;
WфK(р) - передаточная функция противоизгибного фильтра в канале курса;
· для канала крена:
σэ = ωxзад + Кγ · ωx (5.3)
ωxзад - заданная угловая скорость по каналу крена;
Кγ - передаточное число по угловой скорости крена;
ωx - угловая скорость колебаний ракеты по крену.
5.5. Управление траекторным движением на конечном участке.
В ИСУ реализован режим самонаведения ракеты на конечном участке (КУ) траектории по информации АРГС. В этом режиме осуществляется обмен информационными массивами между ИСУ и АРГС. Из ИСУ в АРГС передается следующая информация:
· модуль дальности до цели;
· компоненты вектора скорости движения ракеты в Земной системе координат (ЗСК);
· координаты положения ракеты в ЗСК;
· координаты приоритетной точки;
· компоненты радиуса неопределенности цели;
· признак окончания разворота;
· заданная величина сектора обнаружения;
· признаки береговой черты, цели, логики выбора цели и передачи параметров;
· стартовый номер ракеты в залпе;
· высота полета ракеты;
· величина установки по высоте;
· тип задачи;
· компоненты вектора углового положения корпуса ракеты относи-тельно ЗСК;
· дальность выставки строба;
· число целей в группе.
Под ЗСК понимается система координат, начало которой совпадает с точкой положения ракеты относительно Земли в момент выработки команды на включение АРГС, плоскость OXZ ЗСК моделирует плоскость местного горизонта, азимутальная ориентация совпадает с ориентацией платформенной системой координат (ПСК).
Включение АРГС осуществляется при наличии признака включения АРГС, формируемого в алгоритме включения АРГС. После включения АРГС начинает поиск цели и после выбора цели выдает в ИСУ координаты цели в ЗСК и признак выбора цели. В ИСУ после преобразования полученных координат цели в навигационную систему координат (НСК) с началом отсчета в точке старта ракеты, координаты цели поступают в алгоритм управления боковым движением для разворота на выбранную цель. В процессе разворота осуществляется поиск цели, по окончании которого выдается признак автосопровождения цели и начинается автосопровождение (АС) цели.
При автосопровождении АРГС выдает следующую информацию:
· модуль дальности до цели;
· скорость сближения;
· углы пеленга;
· компоненты угловой скорости линии визирования;
· координаты выбранной цели в ЗСК;
· признаки исправности АРГС, выбора цели, типа цели,АС.
В момент начала АС отключается алгоритм УБД и управление ракетой в боковой плоскости осуществляется алгоритмом комплексирования ИСУ с АРГС. Наведение производится в опорной системе координат (ОСК). ОСК моделирует плоскость местного горизонта с ориентацией в азимуте, совпадающей с НСК. Начало отсчета ОСК - точка положения ракеты в момент начала АС. В боковой плоскости также предусмотрен режим «Змейка» при наличии признака маневра «Змейка» в ПЗ. В этом режиме к заданному управлению в боковой плоскости добавляется синусоидальная добавка с определенной частотой и амплитудой. В вертикальной плоскости заданное управление формируется в диапазоне дальностей до цели от 1000 до 3500 м с выдачей признака СНВ в следующих случаях:
· маневр в вертикальной плоскости («горка») задан в ПЗ;
· при стрельбе по малой цели величина установки превышает 2 м;
· произошел отказ радиовысотомера (РВ) на время более 1 с.
С момента формирования СНВ отключается алгоритм управления продольным движением (УПД). Выполнение маневра «горка» блокируется в случае срыва АС до начала этого маневра.
При срыве АС ИСУ формирует признак экстраполяции и осуществляет наведение ракеты в пролонгируемую точку цели. Если срыв АС произошел на дальности менее 1500 м до цели, то формируется признак запрета перенацеливания. При обнаружении новой цели АРГС начинает ее сопровождение, а ракета продолжает наводиться в пролонгируемую точку положения старой цели. Перенацеливание ракеты производится только в случае пролета старой цели. Такая логика функционирования принята потому, что при срыве АС на дальности менее 1500 м до цели вероятность попадания остается достаточно высокой. Если ракета пролетела пролонгируемую точку положения цели, то боковая заданная перегрузка обнуляется. Если срыв АС произошел на дальности более 1500 м до цели, то при обнаружении новой цели производиться перенацеливание ракеты.
При достижении дальности до цели 1,5 км ИСУ выводит ракету на заданную высоту полета 2,5м. В случае промаха ИСУ формирует признак пролета цели и выводит ракету на заданную высоту полета 4м. Если в течении 30 с после пролета цели новая цель не обнаружена, то ракета ликвидируется.
5.6. Привод газовый ПГ
Газовый привод ПГ - исполнительный орган системы управления ракеты, предназначен для отклонения рулей.
ПГ представляет собой систему взаимосвязанных устройств, предназначенных для приведения в движение рулей (рис.20).
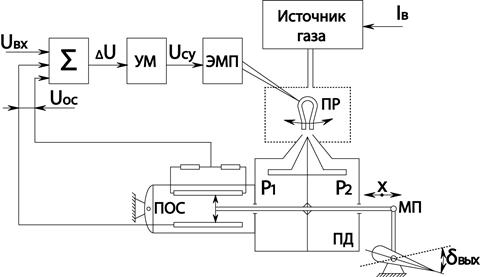
Рис.20. Газовый привод (структурная схема).
Σ - сумматор сигналов
УМ - усилитель мощности
ЭМП - электромеханический преобразователь
ПР - пневматический распределитель
ПД - пневматический двигатель
ПОС - потенциометр обратной связи
МП - механическая передача
Пневмоустройства привода по функциональному назначению подразделяются на исполнительные, распределительные и управляющие.
При подаче импульса включения Iв сжатый газ поступает на вход пневматического распределителя (ПР), входящего в контур следящего привода. Задача ПР - перемещение выходного штока (δвых) пропорционально входному сигналу Uвх.
Если Uвх равен сигналу обратной связи Uос, то с сумматора (∑) сигнала нет и якорь электромеханического преобразователя (ЭМП) и связанная с ним трубка ПР находятся в среднем положении.
При этом газ поступает в обе полости пневматического двигателя (ПД) в одинаковых количествах и последний неподвижен. Если равновесие сигналов нарушается (Uвх-Uос ≠0), якорь ЭМП и струйная трубка отклоняются. При этом в одну из полостей ПД поступает, большее количество газа, в другую - меньшее, т.е. в полостях создается разность давлений (P1 – P2≠ 0), и поршень через механическую передачу (МП) передвигает руль на угол δвых. Перемещение закончится, когда новая величина Uос, подаваемого с потенциометра обратной связи (ПОС), уравновесит значение входного сигнала:
Uвх-Uос = 0.
Мощность управляющего воздействия ПР мала, а мощность выходных газовых потоков достаточно велика, следовательно, ПР имеет большой коэффициент усиления по мощности, равный ~(103 – 104). Из-за малой массы подвижных элементов достигается достаточно большое быстродействие. Конструктивно ПГ выполнен в виде единого рулевого агрегата.
5.7. Радиовысотомер
Радиовысотомер предназначен для измерения высоты полета над любой подстилающей поверхностью независимо от погодных условий и выдачи в ИСУ этих данных,
РВ с непрерывным излучением частотно-модулированного СВЧ сигнала. Тип модуляции - несимметричная нарастающая функция с коротким обратным ходом (Тох) и паузой (Тп) (рис.21). Измеряемая высота кодируется в длительности рабочего хода Тм модулирующей функции, которая измеряется цифровым периодомером. Через конечное устройство информация о высоте передается в ИСУ ракеты.
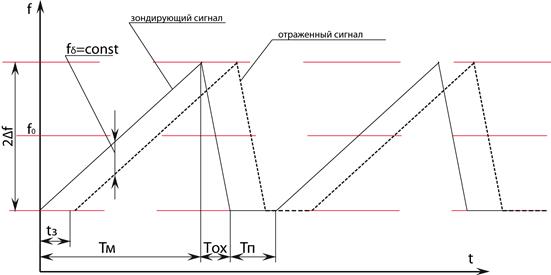
Рис. 16. Закон модуляции.
Принцип действия РВ основан на поддерживании следящей системой частоты биений fδ на уровне опорной f0 при различных высотах полета за счет изменения крутизны рабочего хода модулирующей функции при ее неизменной амплитуде. Пауза в модуляции делается для успокоения "звона" в приемнике, возникающего в моменты резкого излома модулирующей функции вследствие ударного возбуждения. Длительность Тм является линейной функцией измеряемой высоты:
Тм = 4 · ∆ f · H / (C · fδ) (5.4.)
где ∆ f - девиация частоты зондирующего сигнала;
fδ - частота биений;
H - измеряемая высота;
С - скорость распространения радиоволн.
РВ выдает информацию в виде чередующихся слов последовательного 32-разрядного двоичного кода.
Конструктивно РВ выполнен в виде моноблока с двумя рупорными антеннами, которые соединены с моноблоком ВЧ кабелями.
Система электроснабжения
6.1. Состав
Система электроснабжения ракеты предназначена для обеспечения аппаратуры ракеты электроэнергией в автономном полете и состоит из источников электроэнергии и электросети.
На ракете установлены источники тока:
· первичные- узел батарей УБ и турбогенератор ТГ с блоком выпрямления и коммутации БВРК;
· вторичный - блок питания БП.
УБ обеспечивает аппаратуру ракеты постоянным током на стартовом участке полета. ТГ совместно с БВРК обеспечивает аппаратуру ракеты постоянным током от момента запуска МД до конца автономного полета. БП обеспечивает аппаратуру ракеты трехфазным переменным током в автономном полете.
6.2. Узел батарей УБ
Узел батарей УБ предназначен для питания бортовой аппаратуры постоянным током напряжением 27В. Состоит из двух серийных батарей: одна основная и одна специальная.
Батарея – тепловой химический источник тока одноразового использования с пиротехническим приводом в действие.
Приведение батареи в рабочее состояние осуществляется подачей на электровоспламенитель (ЭВ) импульса тока не менее 1А от внешнего источника постоянного тока в течение не менее 0,01 с.
ЭВ срабатывает и поджигает пиронагреватели, проложенные между химическими элементами. Выделившееся при горении пиронагревателей тепло расплавляет таблетки электролита, находящегося до этого в твердом виде, приводя батарею в рабочее состояние.
Для исключения влияния на аппаратуру ракеты колебаний питающего напряжения при срабатывании пиросредств питание последних осуществлено от специальной батареи (батареи «опасных» цепей).
Конструктивно узел батарей представляет собой моноблок, в котором объединены две батареи, реле, обеспечивающее отключение цепей взведения специальной батареи после её взведения, и фильтры, предназначенные для предохранения цепей взведения батарей от наводок.
6.3.Турбогенератор ТГ
Турбогенератор (ТГ) предназначен для выработки переменного тока. Работает совместно с БВРК.
ТГ состоит из статора, ротора и индуктора; размещен во внутренней полости компрессора.
Статор закреплен шпильками к среднему корпусу компрессора, представляет собой пакет электротехнической стали, в котором размещена обмотка. Ротор состоит из пяти постоянных магнитов, соединенных через крестовину с валом МД.
Индуктор – подковообразная стальная втулка, внутри которой размещена кольцевая обмотка возбуждения. При работе МД ротор ТГ, вращаясь вместе с валом, наводит ЭДС в обмотке статора.
6.4. Блок выпрямления, регулирования и коммутации БВРК
Блок выпрямления, регулирования и коммутации БВРК предназначен для следующих функций:
· выпрямление переменного тока, поступающего с ТГ, в постоянный ток для питания аппаратуры ракеты;
· регулирование величины напряжения постоянного тока, поступающего в борт сеть ракеты;
· выдачи сигнала готовности генератора для работы под нагрузкой при частоте вращения ротора МД n=(80 + 2)% от максимальной и достижении напряжения на выходе БВРК (26,5 + 0,5) В;
· передачи в КРД сигнала, пропорционального частоте вращения ротора МД;
· коммутации цепей по командам, формируемым бортовой системой пуска ракеты и КРД.
БВРК состоит из следующих функциональных узлов:
· силового выпрямителя (СВ);
· фильтра радиопомех (ФРП);
· блока регулирования напряжения (БРН);
· схемы измерения напряжения (ИН);
СВ предназначен для выпрямления переменного тока, поступающего с ТГ. ФРП служит для уменьшения уровня радиопомех и снятия пульсаций выходного напряжения.
БРН обеспечивает поддержание в заданных пределах напряжения постоянного тока.
ИН формирует сигнал готовности по напряжению, для чего применена транзисторная схема, выходные реле которой срабатывают при достижении напряжения(26,5 + 0,5) В.
БВРК представляет собой моноблок, в конструкции которого предусмотрена возможность регулировки выходного напряжения с помощью резистора, расположенного на передней панели.
6.5. Блок питания БП
Блок питания (БП) предназначен для обеспечения АРГС и ИСУ переменным трехфазным напряжение 38 В частотой 400 Гц.
БП размещен в металлическом корпусе, литое основание которого является основным несущим элементом и служит теплоотводом для мощных транзисторов. На основании установлены печатные платы с электрорадиоэлементами. С электросхемой ракеты БП соединен разъемом.
Команда «Готов» формируется тремя последовательно соединенными контактами трех реле, каждое из которых срабатывает при появлении выходного напряжения.
Для уменьшения величины радиопомех, создаваемых БП, в цепи напряжения +27В установлен фильтр (ФРП).
6.6. Электрическая сеть
Электрическая сеть ракеты обеспечивает:
· Трансляцию к агрегатам и блокам питающих напряжение, сигналов и команд;
· Связь агрегатов и блоков ракеты с аппаратурой носителя и аппаратурой контроля;
· Допустимый уровень падения напряжения;
· Защиту сигналов и команд от взаимного и внешнего влияния;
· Защиту цепей пиросредств (опасных цепей) от несанкционированного срабатывания.
Электрическая сеть представлена электрическими жгутами и соединителями, в том числе отрывным бортовым разъемом, разъемом безопасности МД.
Электрические жгуты соединяют агрегаты и блоки ракеты. В опасных цепях установлены фильтры защиты, коммуникационные элементы ракеты объединены в блоке автоматики БА, для контроля исходного безопасного состояния и фиксации момента старта служит предохранительный механизм ПМ.
Отрывной бортовой разъем размещен в верхней части отсека 2 и предназначены для связи через ТПК с АСУ и для контрольных проверок ракеты.
Разъем безопасности ракеты служит для предотвращения несанкционированного срабатывания пиросредств МД, размещен в люке отсека 4.
Предохранительный механизм ПМ размещен в хвостовой части отсека ракеты 4.
Пневматическая система
7.1.Состав
Пневматическая система ракеты предназначена для питания потребителей сжатым воздухом и состоит из пневмосистем:
· раскладывание плоскостей;
· питание рулевых приводов.
7.2.Пневмосистема раскладывания плоскостей
Пневмосистема раскладывания плоскостей предназначена для подачи сжатого воздуха в силовые цилиндры механизмов раскладывания консолей крыльев, рулей и в механизм стопорения стабилизаторов.
| Технические данные | |
| Давление воздуха,МПа(кгс/см2): максимальное | 27,5(275) |
| минимальное | 9(90) |
Пневмосистема раскладывания плоскостей (рис.22) состоит из
· пневмоблока 9,
· проверочного штуцера 11, используемого для наземных проверок раскладывания плоскостей,
· быстроразъемного соединения 6 (соединяет пневмосистемы отсеков 4 и 5)
· системы трубопроводов.
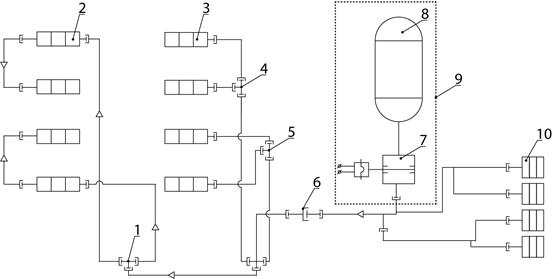
Рис.22. Пневмосистема раскладывания плоскостей.
1. Тройник. 2. Крыло. 3. Руль. 4. Тройник. 5. Тройник. 6. Соединение быстроразъемное 7. Пироклапан. 8. Баллон. 9. Пневмоблок. 10. Механизм стопорения.
При срабатывании пироклапана 7 сжатый воздух из баллона 8 через пироклапан и проверочный штуцер 11 поступает по трубопроводам в силовые цилиндры крыльев 2, рулей 3 и в механизмы стопорения 10 стабилизаторов.
7.2.1.Пневмоблок
Пневмоблок предназначен для хранения сжатого воздуха и подачи его в пневмосистему раскладывания плоскостей. Объем баллона – 0,27 л,
Давление воздуха в баллоне –250 + 10 кгс/см2
Пневмоблок (рис.23) из баллона 2 и приваренного к нему с помощью кронштейна пускового пироклапана 8.
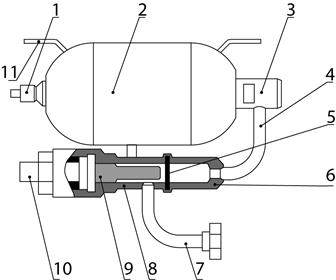
Рис. 23. Пневмоблок.
1. Штуцер зарядный. 2. Баллон. 3. Штуцер. 4. Труба. 5. Мембрана.
6. Наконечник; 7. Труба. 8. Пусковой пироклапан. 9. Пробка.
10. Пиропатрон. 11. Кронштейн.
Баллон изготовлен из цилиндрической трубы, к которой с двух сторон приварены полусферы с вваренными в них штуцерами 1 и 3.
Внутренняя плоскость баллона соединена с наконечником 6 пускового пироклапана трубой 4 и изолирована от окружающей среды мембранной 5, вваренной между наконечником и корпусом пускового клапана. После заполнения баллона сжатым воздухом зарядный штуцер 1 заваривают (ампулизируют). При снаряжении ракеты в пусковой пироклапан устанавливают пиропатрон (10).
При срабатывание пиропатрона пороховые газы воздействуют на пробку 9, которая перемещается и срезает мембрану, при этом пробка своей поверхностью герметично заклинивается в корпусе пускового пироклапана. Сжатый воздух из баллона через пусковой пироклапан по трубе 7 поступает к потребителю.
7.3.Пневмосистема питания рулевых приводов
Пневмосистема питания РП предназначена для подачи сжатого воздуха в РП от пневмоблока в течение первых 15с и горячего воздуха от компрессора МД в остальное время полета ракеты. Давление воздуха, поступающего
от пневмоблока, МПа (кгс/см2) – 0,7-1,2(7-12); давление горячего газа, поступающего от МД, МПа(кгс/см2) – 0,6-1,2(6-12); температура горячего газа, C – 260-330
Пневмосистема питания РП(рис.24) состоит из
· пневмоблока 3,
· фильтра 9,
· редуктора 8,
· обратного клапана 5,
· проверочного штуцера 10 с фильтром, используемого при наземных проверках,
· системы трубопроводов.
При срабатывании пироклапана 1 сжатый воздух из баллона 2 поступает через фильтр 9 в редуктор, где его давление понижается до 0,7-1,2 МПа. Далее через крестовину 6 воздух поступает в РП 12, при этом обратный клапан 5 препятствует выходу сжатого воздуха в атмосферу через МД.
После МД на рабочий режим, компрессор МД начинает подавать горячий воздух давление 0,6-1,2 МПа через обратный клапан и крестовину в РП.
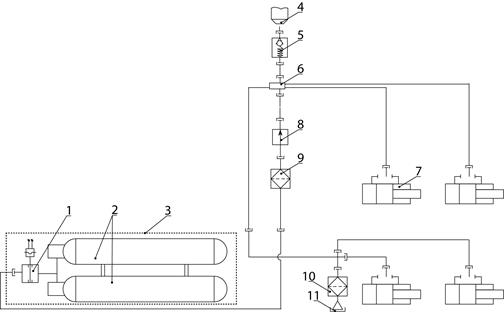
Рис.24. Пневмосистема питания рулевых приводов
1. Пироклапан; 2. Баллон; 3. Пневмоблок; 4. Компрессор МД; 5. Клапан обратный; 6. Крестовина; 7. Рулевой привод; 8. Редуктор; 9. Фильтр; 10. Штуцер проверочный; 11. Заглушка.
7.3.1.Пневмоблок.
Пневмоблок предназначен для хранения сжатого воздуха и подачи его в пневмосистему питания РП.
| Технические данные | |
| Количество баллонов, шт. | |
| Суммарный объем баллонов, л | 1,2 |
| Давление воздуха в баллоне (при t=20*С), МПа(кгс/см*) | 35 + 1(350 + 10) |
Пневмоблок (рис.25) состоит из двух баллонов 6 и пускового пироклапана 12.
Каждый баллон изготовлен из цилиндрической трубы, к которой с двух сторон приварены полусферы со штуцерами. Между собой баллоны скреплены при помощи приваренных к ним пластин 4 и 8.
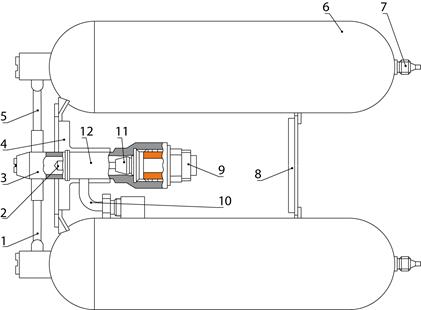
Рис. 25. Пневмоблок.
1. Труба; 2. Мембрана; 3. Наконечник; 4. Пластина; 5. Труба;
6. Баллон; 7. Штуцер зарядный; 8. Пластина; 9. Пиропатрон;
10. Трубопровод; 11. Пробка; 12. Пироклапан пусковой.
Внутренние полости баллонов соединены между собой трубами 1 и 5 через наконечник 3 пускового пироклапана и изолированы от окружающей среды мембранной 2,вваренной между наконечником и корпусом пускового пироклапана.
После заполнения баллона сжатым воздухом зарядные штуцера 7 заваривают (ампулизируют).
При срабатывании ракеты в пусковой пироклапан устанавливают пиропатрон (9).
При срабатывании пиропатрона пороховые газы воздействуют на пробку 11, которая, перемещаясь, срезает мембрану 2 и герметично заклинивается своей поверхностью в конусной части корпуса пускового пироклапана, пропуская сжатый воздух из баллона через трубопровод 10 к потребителям.
7.3.2.Редуктор
Редуктор предназначен для понижения давления воздуха, поступающего из пневмоблока, до 0,7-1,2 МПа и поддержания его в пневмосистеме питания РП.
Редуктор (рис.26) – автоматический регулятор давления прямого действия, элементы которого смонтированы в корпусе 4.
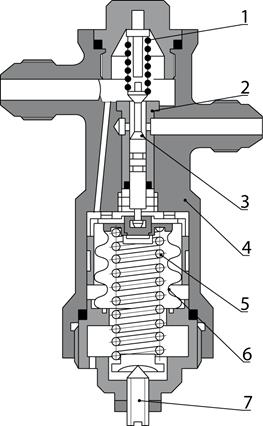
Рис. 26. Редуктор.
1. Пружина; 2. Седло; 3. Клапан; 4. Корпус; 5. Пружина; 6. Сильфон; 7. Винт
Настройка редуктора постоянная и осуществляется затяжной пружины 5 винтом 7. Чувствительный элемент – сильфон 6. Величина подъема клапана 3 относительно седла 2 зависит от величины давления воздуха в выходной и входной плоскостях и усилий пружин 1 и 5.
При повышении давления в выходной плоскости сверх заданного на сильфоне возникает усилие, которое перемещает клапан, уменьшая дросселирующее отверстие, после чего давление в выходной полости снижается. При уменьшении давления в выходной полости редуктора усилие, действует на сильфон, уменьшается. Сильфон с клапаном поднимается вверх, при этом проходное сечение между клапаном и седлом увеличивается, что приводит к повышению давления в выходной полости 7.
7.3.3.Клапан обратный
Обратный клапан предназначен для перекрытия трубопровода, соединяющего компрессор МД с пневмосистемой питания РП, при подаче в нее сжатого воздуха от пневмоблока.
Обратный клапан (рис.27) состоит из корпуса 1, в котором размещен клапан 5, пружина 2 и штуцер 3 с накидной гайкой 4.
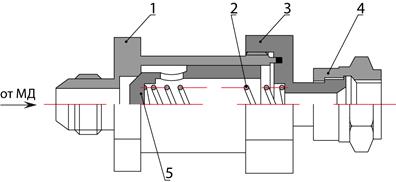
Рис. 27. Клапан обратный
1. Корпус; 2. Пружина; 3. Штуцер; 4. Гайка накидная; 5. Клапан.
При работе РП от пневмоблока сжатый воздух попадает в обратный клапан через штуцер 3, при этом своей конусной частью клапан 5 герметично прижимает к острой кромке корпуса 1, что обеспечивает работу без потери сжатого воздуха.
Когда РП работают от горячего газа МД, клапан 5 отжимается от острой кромки корпуса, и горячий газ поступает в пневмосистему питания РП.

