




Реальный ЛЭ переключается за какое-то конечное время, зависящее от технологии изготовления, условий эксплуатации, емкостей нагрузки и т.д. Прохождение сигнала последовательно через несколько ЛЭ будет приводить к накоплению времени задержки и возникновению сдвига во времени выходного сигнала по отношению к входному. Наличие задержки и порождаемого ею временного сдвига сигналов может приводить к появлению на выходе отдельных ЛЭ и всей схемы в целом кратковременных сигналов, не предусмотренных БФ, реализуемой схемой. Как иллюстрацию, рассмотрим схему рис.11, а.
|
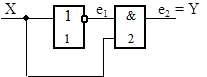
Рис. 11 а)

|
Рис. 11. Статический риск сбоя.
а)- схема, б)- временные диаграммы.
t1-время задержки инвертора
t2-время задержки элемента 2И
Данная схема реализует функцию  , т.е. константу 0 независимо от входного сигнала X. Однако в переходном процессе в результате задержки срабатывания ЛЭ возможна ситуация, когда на обоих входах элемента 2И будут логические единицы, что может привести к появлению на выходе схемы логической 1 (см. рис.11 б). Рассмотренный случай возможен при задержке срабатывания второго элемента больше, чем первого. Такое явление называется риском сбоя. Различают статистический и динамический риски сбоя.
, т.е. константу 0 независимо от входного сигнала X. Однако в переходном процессе в результате задержки срабатывания ЛЭ возможна ситуация, когда на обоих входах элемента 2И будут логические единицы, что может привести к появлению на выходе схемы логической 1 (см. рис.11 б). Рассмотренный случай возможен при задержке срабатывания второго элемента больше, чем первого. Такое явление называется риском сбоя. Различают статистический и динамический риски сбоя.
При статическом риске сбоя до и после переходного процесса состояние выходного сигнала одно и то же, а во время переходного процесса возможно кратковременное появление противоположного сигнала.
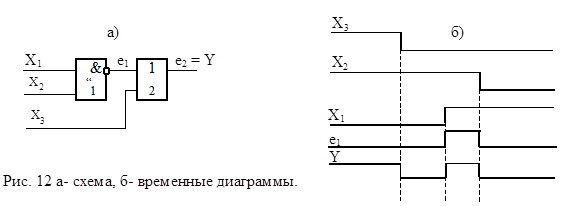
При динамическом риске сбоя до и после переходного процесса состояния выходного сигнала противоположные, но в переходном процессе выходной сигнал несколько раз меняет свое значение. Динамический риск сбоя возможен в схеме (рис.12 а) при смене набора (Х1=0, Х2=1, Х3=1) на набор (Х1=1, Х2=0, Х3=0) и иллюстрируется диаграммами (рис.12 б).
|
В данном примере динамический риск сбоя на выходе КС сопровождается статическим сбоем на выходе элемента 1. Как видно из временных диаграмм риск сбоя имеет место при наличии определенного временного сдвига между сигналами, поступающими на вход ЛЭ. Нежелательные сигналы на выходе могут и отсутствовать при другом соотношении временных сигналов, однако принципиальная возможность их появления является фактором, снижающим надежность работы схемы. Поэтому очень важно уметь обнаруживать и устранять такие явления.
Для анализа процесса переключения КС при смене входных наборов и обнаружения рисков сбоя используется метод асинхронного моделирования. При этом методе считается, что каждый элемент переключается с одинаковой задержкой. Анализ включает такие этапы:
1. Каждому элементу схемы присваивается уровень, причем уровень 1 имеют элементы, все входы которых являются независимыми входами схемы.
2. Записываются уравнения, описывающие каждый ЛЭ в порядке убывания уровня.
3. Для исходного входного набора А(X1, X2, …, Xn) определяется значение сигналов на выходах всех ЛЭ схемы. Пусть данный набор А заменяется набором В(X1, X2, …, Xn).
4. Помечаются те уравнения, в правой части которых хотя бы одна из переменных изменила свое значение.
5. Решаются помеченные уравнения в порядке их записи в схеме. После решения уравнение считается непомеченным.
6. Если после решения всех уравнений системы переменные, входящие в левые части уравнений, изменили свои значения, то вновь помечаются те уравнения, в правые части которых входят эти переменные. Затем осуществляется переход к п.5. В противном случае моделирование данного входного набора считается законченным. Выполнение п.5 называется тактом моделирования.
Анализ схемы (рис.13) методом асинхронного моделирования приведен ниже. Для данной схемы входной набор А(1011110) заменяется набором В(1101011).

|
Рис. 13. Комбинационная схема для метода асинхронного моделирования.
Уравнения, описывающие ЛЭ:
Таблица 5
Таблица моделирования схемы
|
 X7
X7
 e3=X5
e3=X5
 |
Выходы Такты моделирования Прим.
0 1 2 3
e6 1 0 1 0 дин.
e5 0 1 0 0 стат.
e4 0 0 0 0
e3 1 0 0 0
e2 1 0 0 0
e1 0 1 0 1
Как следует из результатов моделирования, при смене набора А набором В на выходе элемента 4 имеет место статический риск сбоя, а на выходе схемы - динамический риск сбоя.
Радикальным способом устранения рисков сбоя является введение стробирования для снятия выходного сигнала КС. Стробирующий импульс подается после окончания переходного процесса в КС (т.е. когда на выходе КС уже установилось необходимое значение выходного сигнала), что исключает влияние возможных сбоев на вырабатываемый схемой сигнал.

