




Размерные связи играют большую роль в создании машины и в процессе ее функционирования. Их круг широк. Однако в данной главе рассмотрение размерных связей будет ограничено их разновидностью, называемой размерными цепями. Характерной особенностью размерных цепей является то, что их количественную сторону отображают линейные уравнения.
Размерные цепи возникают при решении разнообразных конструкторских, технологических и измерительных задач. Разработкой теории размерных цепей занимались многие ученые. Однако автором этой теории признан Заслуженный деятель науки и техники РСФСР д-р техн. наук проф. Б.С. Балакшин, опубликовавший в 1933 и 1934 годах научные работы, в которых описаны принципиальные положения теории размерных цепей. Терминология и основные положения теории размерных цепей изложены в Методических указаниях "Цепи размерные" РД 50—635—87.
Поскольку размерные цепи возникают в результате выбора баз и базирования, то изложению теории размерных цепей должно предшествовать ознакомление читателя с основами базирования.
3.1. ОСНОВЫ БАЗИРОВАНИЯ
Задачи определения положения детали в машине и в процессе ее контроля, заготовки при обработке на станке или их базирование занимают центральное место в процессе создания машины. От того, как они решены, во многом зависит качество деталей и машины в целом.
Вопросам базирования и в нашей стране, и за рубежом уделено большое внимание и посвящено немало специальных научных трудов. Большой вклад в разработку теории базирования внесен учеными Б.С. Балакшиным, А.И. Кашириным, В.М. Кованом, А.А. Маталиным, А.П. Соколовским, В.П. Фираго и многими другими.
Теорию базирования разрабатывали в двух направлениях. Первое из них преследовало цель обобщения опыта машиностроения и классификации баз в соответствии с терминологией, порожденной практикой. Результатом этого направления явилась чрезвычайно обширная и недостаточно строгая терминология, пользование которой было сопряжено с немалыми трудностями. Основу другого научного направления составила теоретическая механика, ее раздел об определении положения твердого тела в пространстве. Основоположником этого направления был Б.С. Балакшин, разработавший в 40-х годах теорию базирования, положенную в основу ГОСТ 21495—76 "Базирование и базы в машиностроении", созданного под его руководством. Надежная теоретическая основа позволила существенно ограничить терминологию в теории базирования и обеспечить ее стройность.
Чтобы читателю была понятна теоретическая подоплека теории базирования, ее изложение целесообразно начать с положений теоретической механики, на которые опирается теория базирования.
Теоретическая механика рассматривает два состояния твердого тела: покоя и движения. Понятия "покоя" и "движения" являются относительными и имеют смысл только тогда, когда указана система отсчета. Если положение тела относительно выбранной системы отсчета со временем не изменяется, то считается, что это тело покоится относительно данной системы отсчета. Если же во времени тело изменяет свое положение относительно избранной системы отсчета, это означает, что тело находится в состоянии движения относительно данной системы отсчета.
Требуемое положение или движение твердого тела относительно выбранной системы отсчета достигается наложением геометрических или кинематических связей. Связями в теоретической механике называют условия, которые налагают ограничения либо только на положение, либо также и на скорость точек тела. В первом случае связь называют геометрической, во втором кинематической.
Связи обычно осуществляются в виде различных тел, стесняющих свободу движения данного тела. Эффект действия связей такой же, как и действие сил, вследствие чего действие связей можно заменить соответствующими силами, называемыми реакциями связей. Направление реакции связи совпадает с тем направлением, в котором связь препятствует перемещению тела.
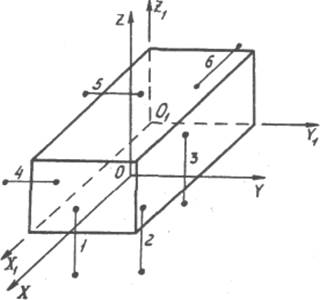
Независимые перемещения, которые может иметь тело, называют степенями свободы. Абсолютно твердое тело имеет шесть степеней свободы. Для того чтобы придать телу необходимое положение и состояние покоя относительно выбранной системы отсчета, его надо лишить шести степеней свободы, наложив на него шесть двусторонних геометрических связей.
Если избрать в качестве системы отсчета прямоугольную систему координат ОХУZ (рис. 3.1), то при наложении шести геометрических связей 1—6 тело лишится трех перемещений вдоль осей ОХ, ОУ и ОZ и трех поворотов вокруг осей, параллельных им, оставаясь неподвижным в системе ОХУZ.
Аналитическое определение требуемого положения абсолютно твердого тела сводится к заданию значений шести независимых параметров, однозначно характеризующих его положение. Сделано это может быть различными способами.
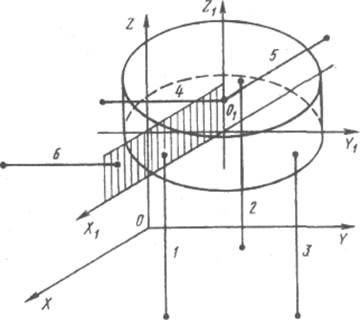
По одному из них с телом связывают неизменно прямоугольную систему координат О1X1Y1Z1, называемую подвижной. Ее положение в системе ОХУZ характеризуют координаты х, у, z начала О 1и три угла Эйлера: Q — угол нутации, ψ — угол прецессии и φ — угол собственного вращения системы О1Х1У1Z1. По значениям этих параметров судят о положении как системы О1Х1У1Z1 так и самого тела относительно системы ОХУZ, являющейся системой отсчета. Положение подвижной системы координат и самого тела будет также определено, если выбрать на плоскости X1О1 У1 три точки, не лежащие на прямой линии, на Х1О,Z1 — две, на У1О1Z1 — одну и задать значения их координат (рис. 3.2). Поскольку параметру х, у, z, Q, ψ, φ аналитически связаны со значениями координат этих шести точек, то такой способ характеристики положения тела в системе ОХУZ будет равнозначен изложенному выше. Из восемнадцати координат, определяющих положение шести точек, шесть (z1, z2, z3, y4, y5, x6) будут независимыми. Неизменность их значений есть условие деиствия шести геометрических связей, наложенных на тело.

3.1 Геометрические связи и координаты тела, определяющие положение твердого тела в системе OXYZ.

3.2 Определение положения тела с использованием координат размещенных на плоскостях подвижной системы O1X1Y1Z1
Тело находится в неподвижном состоянии, если выполняются два условия:
- сумма всех активных сил, действующих на тело, и реакций равна нулю;
- в начальный момент скорость тела также равна нулю.
Таким образом, придание телу необходимого положения в избранной системе координат и наложение на него геометрических связей заключается не только в достижении заданных значений параметров, характеризующих его положение, но и в переводе тела в тот же момент в состояние покоя с помощью системы сил, обеспечивающих его равновесие и фиксирующих приданное телу положение. Если в избранной системе отсчета требуется создать движение тела с определенной скоростью в одном или нескольких направлениях, то соответствующее число геометрических связей должно быть заменено таким же числом кинематических связей.
Базирование и базы
Под базированием в машиностроении понимают придание заготовке или изделию требуемого положения относительно выбранной системы координат.
Под изделием подразумевают деталь, сборочную единицу, а также режущий и измерительный инструмент, приспособления, приборы и другие объекты, допускающие их представление как абсолютно твердых тел. Имея в виду широкое приложение понятия "Базирование" к различным объектам, изложим его существо применительно к заготовкам и деталям, что нисколько не снижает общности рассматриваемых положений.
Придание телу (заготовке или детали) требуемого положения в избранной системе координат осуществляется в реальной ситуации путем соприкосновения его поверхностей с поверхностями другой детали или деталей, на которые тело устанавливают или с которыми его соединяют. Фиксация достигнутого положения и постоянство контакта обеспечиваются силами, в числе которых первым проявляется действие массы самой детали и сил трения. Реальные детали машин ограничены поверхностями, имеющими отклонения формы от своего идеального прототипа. Поэтому базируемая деталь может контактировать с деталями, определяющими ее положение лишь на отдельных элементарных площадках, условно считаемых точками контакта. Возможность допущения такой условности подтверждают выводы о фактической площади контакта деталей, сделанные учеными, изучающими трение и изнашивание. Например, проф. И.М. Крагельский установил, что фактическая площадь контакта деталей по плоским поверхностям находится на уровне 1 % от их геометрической площади. По данным проф. Ш.М. Билика, это соотношение составляет 0,01 %.
В общем случае при сопряжении детали по трем поверхностям с деталями, базирующими ее, возникает шесть точек контакта. При этом на контактирующих поверхностях точки контакта распределяются определенным образом.
На рис. 3.3 показана деталь типа прямоугольного параллелепипеда, установленная в "угол", образованный базирующими деталями. Шесть точек контакта распределились на поверхностях детали (соответственно и на поверхностях деталей, на которые она установлена) следующим образом: три точки контакта на нижней поверхности детали, две на боковой поверхности наибольшей протяженности и одна на торцовой поверхности. Такому распределению и местоположению точек контакта способствовали выбор места приложения и соотношений сил N1, N 2 и N3, сделанный в стремлении обеспечить равновесие детали. Направление действия силы N1 оказалось внутри треугольника, образованного точками контакта 1, 2 и 3, а силы N2 — между точками контакта 4 и 5. Таким образом, наложение на деталь шести геометрических связей и определение ее положения относительно деталей, на которые она установлена, в реальной жизни осуществляется через точки контакта. Более того, шесть точек контакта материализуют подвижную систему координат O1X1Y1Z1, связанную через них как с базируемой, так и базирующими деталями. Действительно, зная координаты точек контакта 1, 2 и 3, можно построить на них координатную плоскость Х1О1У1. Перпендикулярно к ней и на точках контакта 4 и 5 может быть построена координатная плоскость Х 1 О 1 Z 1. Положение третьей координатной плоскости У 1 О 1 Z 1будет также определено, если она пройдет через точку контакта 6 и одновременно будет перпендикулярной к плоскостям Х1О1У1 и Х 1 О 1 Z 1.
Положение базируемой детали в системе ОХУZ полностью отражает положение системы O1X1Y1Z1, на которую, как и на деталь, наложены шесть связей в виде условий: z 1,z2, z3, у4, у5, х6 = const.

3.3 Сопряжение реальных деталей по трем номинально плоским поверхностям
Из рассмотренного примера видно, что базирование детали было осуществлено с помощью нескольких ее поверхностей — баз.
Базой называют поверхность или выполняющее ту же функцию сочетание поверхностей, ось, точка, принадлежащая заготовке или изделию и используемая для базирования.
Для наложения на деталь шести связей с целью определения ее положения в системе ОХУZ и придания ей состояния покоя потребовались три базы, образовавшие подвижную систему O1X1Y1Z1. Совокупность трех баз, образующих систему координат заготовки или изделия, называют комплектом баз.
В рассмотренном примере система O1X1Y1Z1 была построена на точках контакта базируемой детали с деталями, на которые она установлена. При идеализации геометрической формы поверхностей баз считается, что контакт деталей происходит полностью посопрягающимся поверхностям. И тогда за координатные плоскости принимают поверхности баз, а наличие связей, наложенных на них, отображается опорными точками, носящими теоретический характер.
 Опорная точка — это символ одной из связей заготовки или изделия с выбранной системой координат. Условное изображение опорной точки показано на рис. 3.4.
Опорная точка — это символ одной из связей заготовки или изделия с выбранной системой координат. Условное изображение опорной точки показано на рис. 3.4.
3.4. Условное обозначение опорной точки:
а — на виде спереди и сбоку;
б - на виде сверху
Все опорные точки на схеме базирования нумеруют порядковыми номерами, начиная с базы, на которой располагают наибольшее число опорных точек. Число проекций детали на схеме базирования должно быть достаточным для четкого представления о размещении опорных точек. При наложении в какой-либо проекции одной опорной точки на другую, изображают одну точку и около нее проставляют номера совмещенных точек.
 На рис. 3.5 пример, приведенный на рис. 3.3, дан в другой интерпретации: детали сопрягаются по идеально плоским поверхностям, координатные плоскости системы O1X1Y1Z1 образованы самими базами. Здесь же показана схема базирования устанавливаемой детали.
На рис. 3.5 пример, приведенный на рис. 3.3, дан в другой интерпретации: детали сопрягаются по идеально плоским поверхностям, координатные плоскости системы O1X1Y1Z1 образованы самими базами. Здесь же показана схема базирования устанавливаемой детали.
Рис. 3.5. Идеализированное представление
Рассмотрим случай, когда деталь типа плитки лежит неподвижно на плоской поверхности базирующей детали (рис. 3.6). То, что деталь занимает вполне определенное положение в системе ОХУZ и находится в состоянии покоя, дает основание утверждать, что она лишена шести степеней свободы и на нее наложены шесть связей. Однако деталь контактирует с основанием лишь в трех точках, а ее неподвижность обеспечивается силами трения.
Анализируя условия контакта реальных деталей, следует отметить, что в общем случае мы имеем дело не с идеальными связями, а со связями с трением, которые, кроме нормальных реакций, дают еще реакции, лежащие в касательных плоскостях. Связи с трением активно проявляют себя в процессе базирования деталей и при определенных соотношениях внешних сил и сил трения могут лишать деталь подвижности и обеспечивать определенность ее положения в рассматриваемой

3.6. Базирование детали лежащей на плоскости
системе координат. Действительно, в примере, приведенном на рис. 3.6, наличие шести связей, наложенных на деталь, будет очевидным при соблюдении следующих условий:
z1, z2, z3 =const; y(4), y(5) = const, если F1 > N1 и Mтр > Mвн x(6) = const, если F2 > N2,
где N1, N2, Mвн – соответственно внешние силы и момент, создаваемый парой сил, N3 и N’3; F1, F2, Mтр – соответственно силы и момент трения.
При этих условиях деталь занимает вполне определенное положение в системе ОХУZ, и оно может быть характеризовано конкретными значениями соответствующих параметров.
Понятие об определенности положения детали не следует смешивать с понятием о точности ее положения. Детали или заготовке может быть придано положение, которое будет соответствовать условиям решаемой задачи, а может и не соответствовать им. К тому же, допуски, ограничивающие отклонения в положении заготовки или детали, в одних задачах могут быть весьма широкими, в других — жесткими. Например, при установке в трехкулачковом патроне заготовки из прутка ей может быть придано любое угловое положение в пределах 360° относительно ее оси. Однако то угловое положение заготовки, которое будет случайно избрано и зафиксировано, окажется вполне определенным в системе трехкулачкового патрона, так как на заготовку будет наложена связь. Точно так же положение плитки, установленной на магнитной плите на глаз, будет вполне определенным, хотя может и не соответствовать требованиям к точности ее установки. Для того чтобы в примере, приведенном на рис. 3.6, отобразить действие всех шести связей, необходимо с деталью связать подвижную систему координат O 1 X 1 Y 1 Z 1. Координатную плоскость Х1О1У1 следует построить в данном случае на точках контакта 1, 2 и 3. В качестве координатных плоскостей X 1 O 1 Z 1и Y1O1Z1 удобно использовать плоскости симметрии детали и на них разместить опорные точки, символизирующие действие остальных трех связей. На рис. 3.6 приведена также схема базирования детали, на которой опорные точки, проставленные на координатных плоскостях X 1 O 1 Z 1и Y1O1Z1, вынесены за пределы изображения детали.
Классификация баз
Несмотря на разнообразие задач по базированию, оказалось возможным ограничиться тремя признаками при классификации баз: по назначению, по лишаемым степеням свободы и по характеру проявления.
Классификация баз по назначению. Базирование необходимо на всех стадиях создания изделия: при конструировании и рассмотрении его в сборе, при изготовлении и измерении. Отсюда вытекает необходимость разделения баз по назначению на три вида: конструкторские, технологические и измерительные.
Конструкторской называют базу, используемую для определения положения детали или сборочной единицы в изделии. Группу конструкторских баз составляют основные и вспомогательные базы (рис. 3.7).
Основной называют конструкторскую базу, принадлежащую данной детали или сборочной единице и используемую для определения их положения в изделии.
Вспомогательной называют конструкторскую базу, принадлежащую данной детали или сборочной единице и используемую для определения положения присоединяемого к ним изделия (детали или сборочной единицы).

3.7. Основные и вспомогательные базы деталей
Из определения понятий основной и вспомогательной баз видно различие их функций. С помощью комплекта основных баз определяют положение самой детали в машине или в сборочной |единице. С помощью комплекта вспомогательных баз определяют положение относительно данной детали присоединяемой к ней детали или сборочной единицы. Различие ролей основных и вспомогательных баз необходимо учитывать как при конструировании (выборе инструктивных форм поверхностей деталей, задании их относительно положения, простановке размеров, разработке норм точности и т.д.), так и в технологическом процессе изготовления детали и в процессе измерения.
Можно заметить, что любая деталь может иметь только один комплект основных баз и столько комплектов вспомогательных баз, сколько деталей или сборочных единиц к ней присоединяется.
Технологической называют базу, используемую для определения положения заготовки или изделия в процессе изготовления или ремонта. Понятие технологической базы распространяется на все стадии процесса изготовления изделия (на изготовление детали механической обработкой, на сборку изделия и т.д.).
Измерительной называют базу, используемую для определения относительного положения заготовки или изделия и средств измерения. Измерительные базы необходимы во всех случаях измерений (при оценке точности детали, в процессе настройки станков и т.д.). Классификация баз по назначению не допускает совмещения названий баз в рамках этого признака. Например, нельзя технологическую базу назвать основной или вспомогательной. Хотя в качестве технологических могут быть использованы и основные, и вспомогательные базы. То же относится к измерительным базам.
Классификация баз по лишаемым степеням свободы. Законы базирования являются общими для всех стадий создания изделий. Поэтому независимо от назначения базы различают в зависимости от их участия в наложении связей на базируемые заготовки, детали шли сборочные единицы.
Комплект баз может быть образован сочетанием поверхностей разных размеров и конструктивных форм (плоских, цилиндрических, ионических и др.), и распределение шести связей между ними может быть различным. С точки зрения числа и свойств воспринимаемых связей база может быть установочной, направляющей, опорной, двойной направляющей или двойной опорной.
Установочной называют базу, используемую для наложения на заготовку или изделие связей, лишающих их трех степеней свободы — перемещения вдоль одной координатной оси и поворотов вокруг двух других осей. Например, если деталь призматическая (рис. 3.8), роль установочной базы выполняет нижняя поверхность, использованная для наложения трех связей, лишающих деталь возможности перемещаться в направлении оси ОZ и поворачиваться вокруг осей, параллельных ОХ и ОY. Направляющей называют базу, используемую для наложения на заготовку или изделие связей, лишающих их двух степеней свободы — перемещения вдоль одной координатной оси и поворота вокруг другой оси. Для детали призматической формы — это боковая поверхность детали, наложение через которую двух связей на деталь лишило ее возможности перемещения в направлении оси ОY и поворота вокруг оси, параллельной ОZ.
Опорной называют базу, используемую для наложения на заготовку или изделие связи, лишающей их одной степени свободы — перемещения вдоль одной координатной оси или поворота вокруг оси.
3.8. Наложение шести связей на призматическую деталь
В данном случае в качестве опорной базы использована одна из торцовых поверхностей детали. Через эту поверхность у детали отнята возможность перемещения в направлении оси ОХ.
Комплект баз, в состав которого входит установочная, направляющая и опорная базы, представляет собой подвижную систему координат O1X1Y1Z1, на которую наложены те же связи, что и на деталь: три связи — на координатную плоскость O1X1Y1, две — на O1X1Z1 и одна — на O1Y1Z1. Данный комплект баз является весьма распространенным и может считаться типовым.
Если базирование детали или заготовки осуществляется с использованием цилиндрической (конической) поверхности большой протяженности (соотношение ее длины и диаметра больше единицы), то с помощью этой поверхности на деталь или заготовку можно наложить четыре связи. Такая база получила название двойной направляющей
Двойной направляющей называют базу, используемую для наложения на заготовку или изделие связей, лишающих их четырех степеней свободы — перемещений вдоль двух координатных осей и поворотов вокруг осей, параллельных им.
Наложение связей на деталь или заготовку с помощью цилиндрической (конической) поверхности чаще всего осуществляется через ось (рис. 3.9), относительно которой она образована вращением образующей прямой.

3.9. Наложение шести связей на цилиндрическую деталь
Это может служить основанием для совмещения с этой осью оси O1Xподвижной системы О1Х1У1Z1. Рассматривая ось О 1 Х 1как пересечение координатных плоскостей X1O1Y1 и X1O1Z1, две связи (1 и 2) из четырех, наложенных на ось, можно отнести к координатной плоскости X1O1Y1, две (3 и 4) — к X1O1Z1. Эти связи отбирают у детали возможность перемещаться вдоль и поворачиваться вокруг осей, параллельных ОУ и ОZ. Перемещения детали вдоль оси О1Х1 может лишить связь 5, наложенная на торец детали и координатную плоскость Y1О1Z1, совмещенную с ним. Угловое положение детали будет определено, если на координатную плоскость Х1О1Y1 наложить дополнительно связь 6. Последние две связи реализуются при помощи двух опорных баз, одна из которых отбирает у детали возможность перемещения, другая — поворота.
Комплект из двойной направляющей и двух опорных баз широко распространен и может считаться также типовым.

3.10 реализация двойной направляющей базы сочетанием 2х поверхностей
а) опорными шейками вала,
б) центровыми отверстиями.
Часты случаи, когда двойную направляющую базу образует сочетание двух цилиндрических или конических поверхностей небольшой протяженности (рис.3.10). Роль двойной направляющей могут выполнять две опорные шейки вала (рис. 3.10, а), по которым его базируют на подшипниках в корпусе, во втором — конические отверстия (рис. 3.10, б), с помощью которых заготовку вала устанавливают в центрах на токарном станке.
Положение детали типа диска будет более устойчивым, если установить его на торец и сделать торец установочной базой (рис. 3.11). Тогда с торцем окажется совмещенной координатная плоскость Х1О1У1, на которую будут наложены три связи, присущие установочной базе. Две связи (4 и 5), лишающие диск возможности перемещения в направлении осей ОХ и ОY, целесообразно в данном случае наложить на ось цилиндрической поверхности, совместив с нею координатную ось О1Z1. Две связи, наложенные на ось, следует рассматривать относящимися соответственно к координатным плоскостям Х1О1Z1 и У 1 О 1 Z 1. Для того чтобы лишить диск возможности поворота вокруг оси О1Z1, необходимо наложить связь 6 на координатную плоскость Х 1 О 1 Z 1, создав тем самым опорную базу.
 В данном случае ось цилиндрической поверхности детали была использована как база для лишения детали двух перемещений. Такая база получила название двойной опорной.
В данном случае ось цилиндрической поверхности детали была использована как база для лишения детали двух перемещений. Такая база получила название двойной опорной.
3.11. Наложение шести связей на деталь типа диска
Двойной опорной называют базу, используемую для наложения на заготовку или изделие связей, лишающих их двух степеней свободы — перемещений вдоль двух координатных осей.
В отличие от направляющей базы, с помощью которой деталь лишается одного перемещения и одного поворота, двойную опорную базу используют для лишения детали двух перемещений. Комплект из установочной, двойной опорной и опорной баз следует считать третьим типовым комплектом баз.
Классификация баз по характеру проявления. Третий признак классификации, независимо от первых двух, дает разделение баз на скрытые и явные.
Скрытой называют базу в виде воображаемой плоскости, оси или точки.
Явной называют базу в виде реальной поверхности, разметочной риски или точки пересечения рисок. К скрытым базам прибегают, когда требуется определить положение детали или заготовки с использованием плоскостей симметрии, оси или пересечения осей. С такими случаями мы уже встречались (см. рис. 3.6, 3.9—3.11), где в роли скрытых баз выступали плоскости, оси, пересечения осей координатной системы, связываемой с деталью. Наложение связей на скрытые базы может быть осуществлено либо на глаз, либо с помощью специальных технических средств. В первом случае человек, оценивая положение воображаемых координатных плоскостей относительно системы отсчета, придает нужное положение детали или заготовке. Таким примером может служить установка заготовки (плитки) на магнитной плите плоскошлифовального станка, производимая на глаз. Для повышения точности базирования могут быть применены измерительные приборы или инструменты.
3.12 Базирование рычага
В других случаях базирование по скрытым базам с надлежащей точностью может быть выполнено лишь с помощью специальных средств (центров на токарном станке, самоцентрирующих патрона и тисков и т.д.). На рис. 3.12 показано базирование рычага по двум его плоскостям симметрии, осуществленное с помощью одновременно сходящихся призм. Положение координатной плоскости Х1О1Z1 рычага определено призмами, а плоскости Y1O1Z1 — устройством, одновременно сводящим призмы. При этом наложение связей (опорные точки 4, 5 и б) на обе координатные плоскости осуществляется в момент контакта рычага с призмами в четырех точках.
Таким образом, базирование по скрытым базам с применением технических средств может осуществляться также через контакт базируемой детали с базирующими деталями по реальным поверхностям. Однако наложение связей на координатные плоскости реализуется в этих случаях не непосредственно через точки контакта, как это было при базировании по явным базам (см. рис. 3.3), а при участии их и в функциональной связи с ними.
Следует отметить, что при построении системы координат на типовых комплектах баз (см. рис. 3.8, 3.9, 3.11) в каждом случае был использован свой подход. Несмотря на это, во всех случаях на координатную плоскость Х 1 О 1 Y 1, оказались наложенными три связи, на плоскость Х 1 О 1 Z 1 — две и на Y1O1Z1 — одна связь. Одинаковое распределение связей между одноименными координатными плоскостями не является случайным и имеет значение при выдвижении требований к относительному положению баз, составляющих комплект.
Для того чтобы при построении в общем случае системы ОХYZ на любом комплекте баз распределение связей между координатными плоскостями было бы всегда идентичным, следует придерживаться некоторых правил. Одну из координатных плоскостей, принимаемую за начало отсчета (рекомендуется ХОУ), необходимо связать с базами таким образом, чтобы она была лишена одного перемещения и двух поворотов, другая (ХОZ) — была перпендикулярна к ХОУ и лишена одного перемещения и одного поворота, третья (УОZ) — была перпендикулярна к ХОУ и ХОZ и лишена одного перемещения.
Роль баз, как координатных систем, чрезвычайно важна в обеспечении качества создаваемой машины. Вполне понятно поэтому значение правильности построения и увязки их относительного положения в конструкции машины и технологическом процессе ее изготовления.
На рис. 3.13 приведена схема классификации баз по трем признакам. Согласно этой схеме полное название базы должно охватывать в принятой очередности три классификационных признака. Так, базы, определяющие положение вала, показанного на рис. 3.10, а, имеют следующие названия: конструкторская основная, двойная направляющая, скрытая; конструкторская основная, опорная, явная; конструкторская основная, опорная, скрытая. Положение рычага в примере, приведенном на рис. 3.12, определяют базы: технологическая, установочная, явная; технологическая, направляющая, скрытая; технологическая, опорная, скрытая.
Ради упрощения из названия баз часто опускают слова "конструкторская" и "явная", имея в виду, что если база основная или вспомогательная, то само собой разумеется, что она конструкторская, и если база не скрытая, то она явная. Допускаются и краткие названия баз, отражающие только те классификационные признаки, которые представляют интерес в данный момент времени: основная установочная база; технологическая база; двойная опорная скрытая база и т.п. Практика показывает, что регламентированная ГОСТ 21495—76 классификация баз вполне достаточна для решения разнообразнейших задач по базированию в области конструирования и изготовления машин. Поэтому следует избегать введения дополнительных названий баз, чтобы не усложнять работу конструкторов и технологов.

3.13 Классификация баз

