




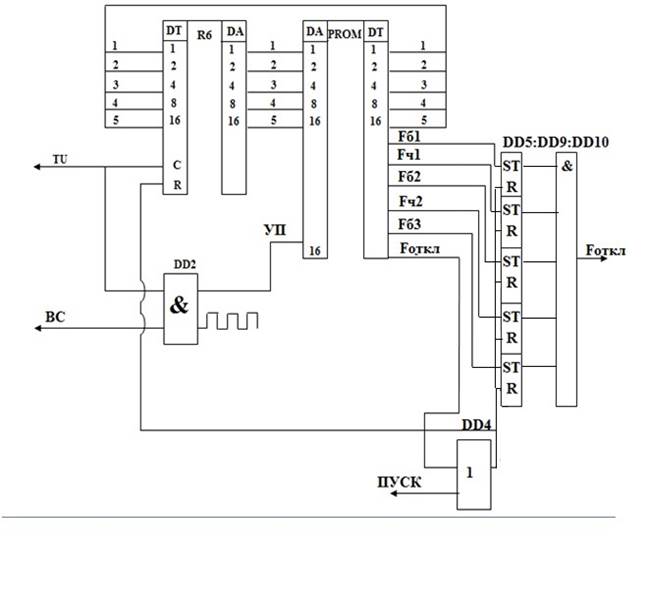
Техническое описание состава и взаимодействия элементов функциональной схемы устройства обнаружения ЛМ.
В данной работе рассматривается аппаратная реализация периферийного ИВС на «жесткой логике», который выполнен по схеме конечного автомата II-го рода (с памятью) реализующую функции обнаружения ЛМ. Основными функциональными узлами периферийной ИВС является:
- микропрограммная память (ПЗУ) для записи микропрограмм;
- регистратор микропрограммы, формирующий адрес текущей микрокоманды;
- тригерная схема для записи разнесенных во времени, в процессе работы функцию обнаружения полей ЛМ и схема принятия решения обнаружения ЛМ.
Взаимодействие элементов функциональной схемы: видеосигнал (ВС) поступает от считывающего устройства ЛМ на схему его дискретизации (преобразуется значение «0» в «1») ДД2 555ПАТ3 (схема &), которая осуществляется подачей на II-й вход схемы ДД2 тактовых импульсов (ТИ) синхронизации устройства. Сформированным таким образом цифровой ВС используется в качестве условия перехода (УП) и поступает в качестве адреса. Текущий адрес микрокоманды формируется регистратором микрокоманды ДД1, при этом начальный адрес («1») формируется на выходе ДД1 путем установки регистратора в «0» состояние по входу «R» сигналом «ПУСК» через схему ДД4 (схема «1») 555 ЛМ1 или значение Fотк через II-й вход схемы ДД4. При этом текущий адрес микрокоманды подается на адресные входы ПЗУ – PROM.
В течении импульсов синхронизации адрес следующей МК формируется на выходе регистра и поступает на входы ПЗУ и обеспечивает выполнение следующей МК. Аналогично выполняются все МК. При этом на информационных выходах ПЗУ формируются, при выполнении соответствующей МК, формируются сигналы обнаружения полей метки Fбп…Fбп3 (каждый в течении 1 импульса синхронизации), а также Fотк. В виду того, что сигналы обнаружения полей формируются в разное время, в виду последовательного сканирования метки лучом сканера, то для принятия решения об обнаружении полей метки и метки в целом применяются тригерные схемы ДД5…ДД9, которые устанавливаются сигналом «ПУСК» или Fотк через схему ДД4 в «0» состояние по входу R каждый, а при поступлении сигнала обнаружения поля устанавливается в состояние «1». Это обеспечивает в случаи обнаружения всех полей метки подачи сигнала «1» на все входы устройства принятия решения ДД10 (схема &) 555ПА1В8, которая в таком случаи формирует на выходе сигнал обнаружения ЛМ Fотк.
Аналогичную процедуру можно реализовать на микропроцессоре или персональном компьютере, если обнаружение полей вводится в порт ПК, однако это требует разработки программы и более высоких затрат на аппаратное обеспечение.
Выводы
В данном индивидуальном задании мы изучили методы расчёта технических характеристик считывающих устройств ПОМ, а также специфику расчета числа элементов дискретизации видеосигнала считывания ШК, необходимой разрешающей способности считывающих устройств в поле считывания, применительно к разработке алгоритмического, программного и аппаратного обеспечения устройств идентификации ПО в почтообрабатывающих машинах. Разработали в соответствии с ТУ геометрическую модель (ГМ) лицовочной метки ТУ. Выполнили расчёт числа элементов дискретизации полей ЛМ (три белых поля, два чёрных поля). В соответствии с рассчитанными значениями числа элементов дискретизации ЛМ выполнили разработку ССА с учётом заданного числа элементов забеления. Выполнили разработку формата микрокоманды и микропрограммы обнаружения ЛМ. Выполнили разработку функциональной схемы устройства обнаружения (УО) ЛМ по схеме конечного автомата второго рода и тригерной схемой принятия решения.
Литература
1. Верхова Г. В., Соколов В. П., Ястребов А., С. Технические средства автоматизации почтовой связи: Учебн. для вузов связи. – С. Пб.: Изд. «Политехника», 2007. – 344 с

