Прописываем путь к папке с тестами
addpath D:\trenag
запускаем тест командой
tr_PID

КОРРЕКЦИЯ КОНТУРА С СТАТИЧЕСКИМ ОБЪЕКТОМ УПРАВЛЕНИЯ
Для придания контуру астатизма по управлению используются интегральные регуляторы: И ПИ и ПИД.
Различаются возможности интегрального (И), пропорционально-интегрального (ПИ) и
пропорционально-интегрального-дифференциального (ПИД) регуляторов.
Производим сравнение коррекции И-регулятором, ПИ-регулятором и ПИД-регулятором.
Одинаковым для трёх видов коррекции делаем запас устойчивости по фазе разомкнутого контура управления,
чтобы обеспечить одинаковое перерегулирование процессов в замкнутом контуре управления объектом.
Контура управления будут различаться быстродествием при обинаковом качестве переходных характеристик.
Параметры регуляторов расчитывают под наибольшее быстродействие (частоту среза) с заданным перерегулированием.
ОБЪЕКТ УПРАВЛЕНИЯ
Warning: Size vector should be a row vector with integer elements.
> In rlax at 10
In tr_PID at 53
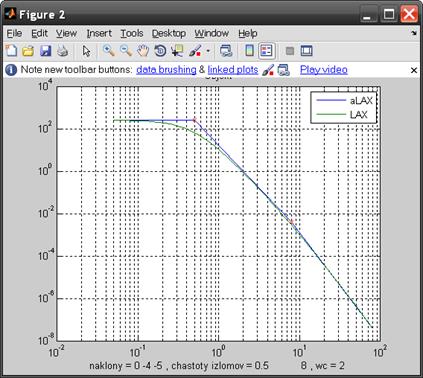
Ассимптотическая ЛАХ объекта управления имеет наклоны 0 -4 -5
с изломами на частотах 0.5 8
и частотой среза wc = 2
_ _ _ _ _ _ _ _
Статический Коэффициент усиления объекта = 256 (это наш К0 из расчета). Передаточная функция объекта управления =
Zero/pole/gain:
---------------
(s+0.5)^4 (s+8)
Нули, полюсы и коэффициент zpk-формы Передаточной функции объекта управления =
z =
Empty matrix: 0-by-1
ps =
-8.0000
-0.5000
-0.5000
-0.5000
-0.5000
k =
Объект, naklony = 0 -4 -5, chastoty izlomov = 0.5 8, wc = 2
ПИД- регулятор имеет два нуля (корня полинома числителя) и два полюса (корня полинома знаменателя).
Своими нулями ПИД- регулятор может компенсирует два полюса объекта управления.
Теоретически Компенсируемые полюсы объекта могут быть положительными, т.е. неустойчивыми. Практически - нет.
Обычно компенсируют самые малые полюсы, как наиболее инерционные, тормозящие процессы управления.
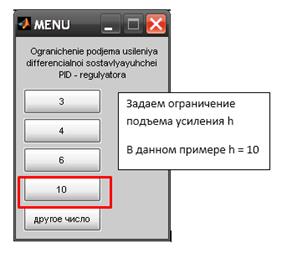
Пусть ограничение подъёма усиления дифференциальной составляющей закона управления = 10
ЗАДАНИЕ КОМПЕНСИРУЕМЫХ ПОЛЮСОВ
ПИД-регулятор компенсирует самую большую постоянную времени Т1 = 2 C, а следующую за ней Т2 = 2 С уменьшает в 10 раза
ПИ-регулятор компенсирует лишь одну, самую большую постоянную времени Т1 = 2 C, так как имеет лишь один нуль.
И-регулятор нулей не имеет и средств для компенсации у него нет.
РАСЧЁТ ОСНОВНОГО ПАРАМЕТРА КОНТУРА УПРАВЛЕНИЯ
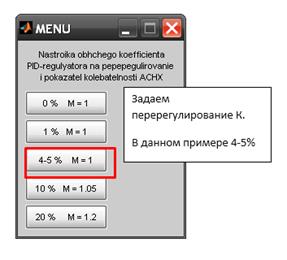
Задаёмся желаемым перерегулированием <= 5 % переходной характеристики контура управления с каждым регулятором.
И соответствующим ему коеффициентом ke = 0.5 смещения частоты среза относительно частоты суммарной инерционности объекта.
Суммарные инерционности = [8.125 6.125 4.325] (это наше Tsum) C нескомпенсированных полюсов контуров управления с И, ПИ, ПИД-регулятором.
Желаемые частоты среза (и коэффициенты усиления)= [0.061538 0.081633 0.11561] (это наше находим желаемую частоту среза wcj) 1/C разомкнутых контуров управления с И, ПИ, ПИД-регулятором
РЕГУЛЯТОРЫ
Передаточная функция (zpk-форма) И-регулятора =
Zero/pole/gain:
0.00024038
----------
s
Передаточная функция (zpk-форма) ПИ-регулятора =
Zero/pole/gain:
0.00063776 (s+0.5)
------------------
s
Передаточная функция (zpk-форма) ПИД-регулятора =
Zero/pole/gain:
0.0090318 (s+0.5)^2
-------------------
s (s+5)
(это наша передаточная функция Wpid (s) в zpk-форме)
Передаточная функция (tf-форма) ПИД-регулятора =
Transfer function:
0.009032 s^2 + 0.009032 s + 0.002258
------------------------------------
s^2 + 5 s
КОНТУРА УПРАВЛЕНИЯ РАЗОМКНУТЫЕ
Частота среза = 0.059805 1/C, запас по фазе = 62.2886 гр. разомкнутого контура управления с И-регулятором. W(s) =
Zero/pole/gain:
0.030769
-----------------
s (s+0.5)^4 (s+8)
Частота среза = 0.078674 1/C, запас по фазе = 62.6103 гр. разомкнутого контура управления с ПИ-регулятором. W(s) =
Zero/pole/gain:
0.081633
-----------------
s (s+0.5)^3 (s+8)
Zero/pole/gain:
1.1561
-----------------------
s (s+0.5)^2 (s+5) (s+8)
Частота среза = 0.11016 1/C, запас по фазе = 63.0985 гр. разомкнутого контура управления с ПИД-регулятором. W(s) =
Zero/pole/gain:
1.1561
-----------------------
s (s+0.5)^2 (s+5) (s+8)
Запасы по фазе = [62.2886 62.6103 63.0985] гр. близки за счёт разных wc = [0.059805 0.078674 0.11016] 1/C, контуров управления с И, ПИ, ПИД-регулятором.
КОНТУРА УПРАВЛЕНИЯ ЗАМКНУТЫЕ
Передаточная функция замкнутого контура управления с И-регулятором =
Zero/pole/gain:
0.030769
------------------------------------------------------------------
(s+8) (s+0.7725) (s^2 + 0.1625s + 0.01364) (s^2 + 1.065s + 0.3651)
Передаточная функция замкнутого контура управления с ПИ-регулятором =
Zero/pole/gain:
0.081633
-------------------------------------------------------
(s+8) (s^2 + 0.2062s + 0.02212) (s^2 + 1.294s + 0.4613)
Передаточная функция замкнутого контура управления с ПИД-регулятором =
Zero/pole/gain:
1.1561
--------------------------------------------------------
(s+8.001) (s+4.996) (s+0.7263) (s^2 + 0.2767s + 0.03982)
Максимум АЧХ замкнутого контура с И, ПИ, ПИД-регулятором, M = [1 1 1] на частоте wm = [0 0 0] 1/C
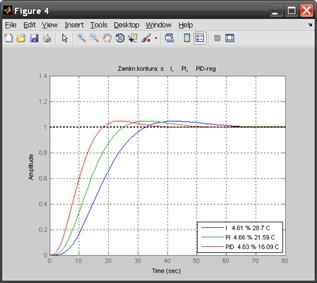
Длительность h(t) = [28.7 21.59 16.09] С, относительно суммарной инерционности = [3.5323 3.5249 3.7202] для контуров с И, ПИ, ПИД-регулятором,
КОЭФФИЦИЕНТЫ И СОСТАВЛЯЮЩИЕ ПИД-РЕГУЛЯТОРА
Обнуленных нулей = 2
Коэффициенты ПИД регулятора: пропорциональный kP = 0.001716, интегральный kI = 0.00045159 (это наш коэффициент интегральный Ki) 1/С, дифференциальный kD = 0.0014632 C
Компенсируемые полюса объекта как отношения коэффициентов: -kI/kP = -0.5, -kP/kD = -0.5
Передаточные функции компонентов ПИД-регулятора: Пропорциональной = 0.001716, Интегральной =
Transfer function:
0.0004516
---------
s
Дифференциальной =
Zero/pole/gain:
0.0073158 s
-----------
(s+5)
- - - - - - - - - - - - - - - - - -
МИНИМИЗАЦИЯ ДЛИТЕЛЬНОСТИ ПЕРЕХОДНОЙ ХАРАКТЕРИСТИКИ И ДРУГИХ ПОКАЗАТЕЛЕЙ КАЧЕСТВА УПРАВЛЕНИЯ
ВАРЬИРУЕМ ПАРАМЕТР ke КОНТУРА УПРАВЛЕНИЯ
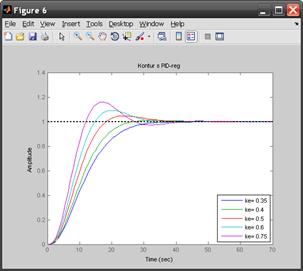
КОНТУР УПРАВЛЕНИЯ С ПИД-РЕГУЛЯТОРОМ
относительный коэффициент ke 0.35 0.4 0.5 0.6 0.75
частота среза разомк.контура 0.07892044 0.08957145 0.1101628 0.1298598 0.1576205
запас по фазе разомк.контура 70.59127 68.01942 63.09847 58.46395 52.07169
перерегулирование (в %) 0.12 1.03 4.63 9.08 16
длительность h(t) 5% трубку 25.34 20.64 16.09 25.46 23.63
длительность h(t) 1% трубку 32.19 33.46 34.47 30.39 38.17
показатель колебательности М 1 1 1 1.030675 1.139509
I1 = интеграл{t*|е(t)|}dt 101.0032 80.07521 65.23106 62.10055 64.79587
I2 = интеграл{е(t)^2}dt 8.924494 8.204782 7.233078 6.628516 6.097149
Приведенные в таблице данные следует использовать для оптимизации контура управления с ПИД-регулятором.
Минимальное время = 16.09 С вхождения процесса в 5 % трубку достигается при перерегулировании = 4.63 % и ke = 0.5,
на скачёк координаты установившеяся ошибка = 0, на скачёк скорости - ошибка = 9.0775, или 907.75 % величины скачка.
Минимальное время = 30.39 С вхождения процесса в 1 % трубку достигается при перерегулировании = 9.08 % и ke = 0.6,
на скачёк координаты установившеяся ошибка = 0, на скачёк скорости - ошибка = 7.7006, или 770.06 % величины скачка.
Минимум показателя колебательности М = 1 достигается при перерегулировании <= 4.63 % и ke <= 0.5.
Минимум (модульной, умноженной на время) интегральной оценки I1 = 62.1006 достигается при перерегулировании = 9.08 % и ke = 0.6.
Минимум квадратичной интегральной оценки I2 достигается вблизи границы устойчивости, и категорически не рекомендуется её использовать для оптимизации.
МИНИМУМ ПЕРЕХОДНОЙ ХАРАКТЕРИСТИКИ ОПРЕДЕЛЯЕТСЯ СУММАРНОЙ ИНЕРЦИОННОСТЬЮ = 4.325 С НЕСКОМПЕНСИРОВАННЫХ ПОЛЮСОВ КОНТУРА УПРАВЛЕНИЯ.
МИНИМУМ ПЕРЕХОДНОЙ ХАРАКТЕРИСТИКИ = 16.09 С ЗАВИСИТ ТОЛЬКО ОТ ДИФФЕРЕНЦИАЛЬНОЙ СОСТАВЛЯЮЩЕЙ, УМЕНЬШАЮЩЕЙ ПОСТОЯННУЮ ВРЕМЕНИ ОБЪЕКТА В 10 РАЗ.
ДАЛЬНЕЙШЕЕ УМЕНЬШЕНИЕ ПЕРЕХОДНОЙ ХАРАКТЕРИСТИКИ ВОЗМОЖНО ДОПОЛНИТЕЛЬНЫМ ПД-РЕГУЛЯТОРОМ, УМЕНЬШАЮЩИМ ЕЩЁ ОДНУ ПОСТОЯННУЮ ВРЕМЕНИ ОБЪЕКТА.
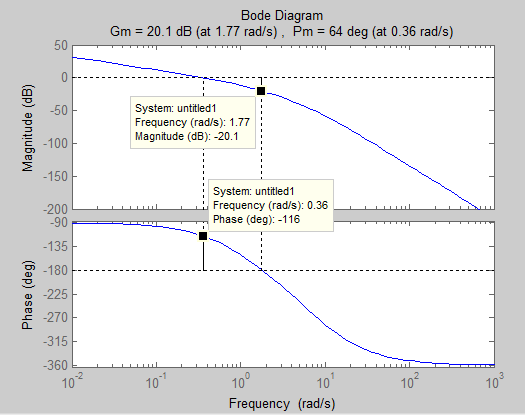
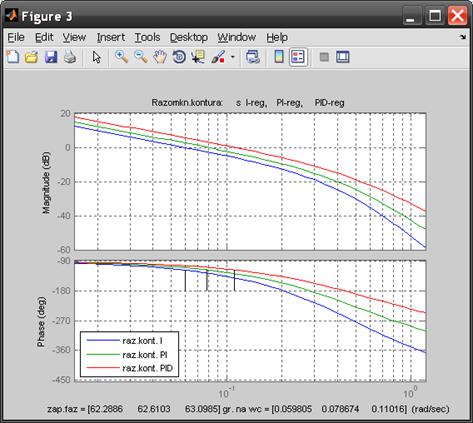
Теперь по графикам. В идеале графики из теста tr_PID и программы из расчета вручную (если расчитано верно) должны совпасть, как и значения, выделенные прямоугольниками. На первом графике это красная линия (raz. Kont. PID) Нужно учитывать тот факт, что на графиках разный масштаб.




Эти графики тоже совпадают с красным из tr_PID (PID и ke=0.5). горб над единичной пунктирной линией означает наше перерегулирование в 5%, которое мы задавали в исходных данных. При ke=0.35 (перерегулирование в 0%) график плавно стремиться к единичному уровню усиления. Чем выше перерегулирование, тем выше ke и выше горб.


Дополнено!
Снять параметры c графиков для препода можно так (сделано на основе других графиков):
После написание проги по вашим расчётам вылезут 2 фигуры
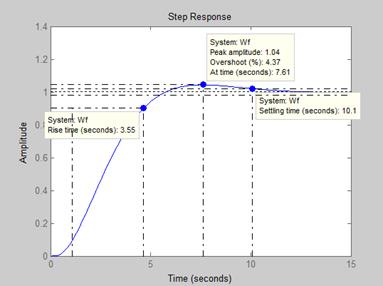
Там, где переходная характеристика с перерегулированием, первый график:
В матлабе правой кнопкой клик -> Characteristics -> Peak Response
Появится синяя точка, на ней левый клик, появятся параметры в прямоугольнике:
Overshoot = перерегулирование
Длительность переходного процесса = время (снизу) на амплитуде (слева) до уровня 1+0.05 или 1-0.05. Это из теории. Или правый клик, Characteristics -> Setting Time. но матлаб криво как-то показывает, не по тем пределам)
Там есть еще время насыщения (время процесса до уровня 0.9 по амплитуде) (ПКМ, Characteristics -> Rise time)

Вторая фигура:
Расставляем точки над пересечением вертикальной пунктирной линией и графиком, нажимаем на точки, вылезут прямоугольники с параметрами. Параметры должны совпасть со сорокой над фигурой, там усиление с частотой и запас по фазе с частотой (с фазой горизонтальный пунктир на -180°, значит 180°-116°=64° = совпадает!)