




В зависимости от характера нагрузки возникает погрешность, как в статическом, так и в динамическом режимах. При активной нагрузке изменяется статическая характеристика. Величина выходного напряжения будет определяться в соответствии с выражением: Uвых=(UrRн)/(RRн+Rr-r2)
Т.е. Uвых=f(r) зависит от Rн. При Rн>>R можно показать, что Uвых=(U/R)r;
при Rн приблизительно равном R зависимость нелинейна, и максимальная погрешность датчика будет при отклонении движка на (2/3))l. Обычно выбирают Rн/R=10…100. Величина ошибки при x=(2/3)l может быть определена из выражения: E=4/27η, где η=Rн/R - коэффициент нагрузки.

Потенциометрический датчик под нагрузкой
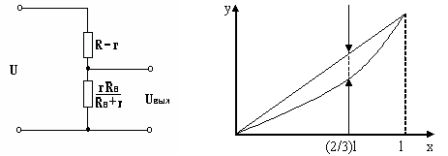
a - Эквивалентная схема потенциометрического датчика с нагрузкой, б - Влияние нагрузки на статическую характеристику потенциометрического датчик)
17)Индуктивный датчик. Устройство. Статическая характеристика.
Ответ:(Индуктивный датчик — бесконтактный датчик, предназначенный для контроля положения объектов из металла (к другим материалам не чувствителен).
Индуктивные датчики широко используются для решения задач АСУ ТП. Выполняются с нормально разомкнутым или нормально замкнутым контактом.
Принцип действия основан на изменении параметров магнитного поля, создаваемого катушкой индуктивности внутри датчика.
Индуктивные датчики применяются для преобразования в электрический сигнал небольших линейных и угловых перемещений. Простейший индуктивный датчик (называемый однотактным) представляет собой катушку индуктивности 1 с железным сердечником 2 и подвижным якорем З, отделенным от сердечника воздушным зазором (рис. 2-4). Катушка индуктивности с сердечником, называемая статором датчика, закрепляется неподвижно, а якорь соединяется механически с подвижной частью ОУ, перемещение которой нужно преобразовывать в электрический сигнал. При перемещении якоря изменяется сопротивление магнитной цепи датчика вследствие изменения воздушного зазора δ между статором и якорем (при вертикальном движении якоря) или площади воздушного зазора S (при горизонтальном движении якоря).
Сопротивление магнитной цепи датчика складывается из сопротивления участка цепи со сталью Rст и сопротивления участка цепи с воздушным зазором Rв. Магнитное сопротивление участка цепи со сталью:
Rст = Lст/(mст/Sст),
где Lст - суммарная длина средней магнитной силовой линии в стали сердечника и якоря; Sст — площадь поперечного сечения стального сердечника; mст — магнитная проницаемость материала сердечника и якоря.
Магнитное сопротивление участка цепи с воздушным зазором:
Rст = 2δ/(μоSв), где δ — длина воздушного зазора между статором и якорем датчика; μо - проницаемость воздуха; Sв - площадь поперечного сечения воздушного зазора. Так как μо>>μо, то Rст0. сопротивление магнитной цепи датчика будет определяться в основном сопротивлением участка цепи с воздушным зазором:
Rм ≈ Rв = 2δ/(;μоSr)
Переменный магнитный поток Ф, возникающий при подключении источника питания к катушке датчика, равен
Ф = Iω/Rм

где I - ТОК в цепи катушки датчика; w - число витков катушки датчика,w - число витков катушки датчика.
Индуктивность катушки датчика (если пренебречь потоком рассеяния):
L = ωФ/I = [ω2/2δ]μS

Формула (2-1) устанавливает функциональную связь между перемещением якоря индуктивного датчика (при перемещении изменяется или d, или Sв) и индуктивностью катушки датчика.
У индуктивных датчиков с изменяющимся воздушным зазором статическая характеристика L=f(x) нелинейная (рис. 2-5, 1) и при больших зазорах (δ > 1 мм) чувствительность датчика уменьшается. Такие датчики используют при ограниченном диапазоне перемещения якоря - до 1 мм, а начальная рабочая точка выбирается в области характеристики, где она имеет наибольшую крутизну и приближается к линейной чувствительность датчиков с изменяющимся воздушным зазором высокая – до 0,2 мкм.
У индуктивных датчиков с изменяющейся площадью воздушного зазора статическая характеристика L=f(Sв) линейная, диапазон перемещения якоря шире — до 8 мм, но чувствительность меньше - до 0,3 мкм (рис. 2-5, 2). Изменение индуктивности катушки датчика L приводит к изменению ее индуктивного сопротивления: ХL = ωL, где ω - круговая частота питающего напряжения. Следовательно, происходит и изменение полного сопротивления катушки: Z = √Rа*2+XL*2, где Ra - активное сопротивление катушки датчика.
Ток I, протекающий в катушке датчика под действием приложенного переменного напряжения U, также изменяется при перемещении якоря и может служить выходным сигналом датчика (выходной характеристикой). Условно принцип работы индуктивных датчиков можно представить в виде цепи преобразований происходящих при перемещении якоря датчика (для датчиков с изменяющимся воздушным зазором):
x↑ → δ↑ → Rm↑ → Ф↓ → L↓ → Xl↓ → Z↓ → I↑
Однотактные индуктивные датчики имеют высокую чувствительность и надежность, практически неограниченный срок службы, большую мощность выходного сигнала (до нескольких ватт), что позволяет в ряде случаев не применять усилитель. К недостаткам индуктивных датчиков следует отнести нереверсивность характеристики, небольшой диапазон перемещений якоря, наличие тока холостого хода и электромагнитной силы притяжения между якорем и статором, влияние колебаний амплитуды и частоты напряжения питания. Эти недостатки полностью или частично отсутствуют у дифференциальных индуктивных датчиков.
18)Тахогенератор-датчик угловой частоты вращения. Устройство. Принцип работы.
Ответ: (Тахогенера́тор —измерительный генераторпостоянного или переменного тока, предназначенный для преобразования мгновенного значения частоты (угловой скорости) вращения вала в пропорциональный электрический сигнал.
Величина сигнала (ЭДС) прямо пропорциональна частоте вращения.
Сгенерированный сигнал подаётся для непосредственного отображения на специально проградуированный вольтметр (тахометр) либо на вход автоматических устройств, отслеживающих частоту вращения.
Принцип действия
Действие тахогенератора основано на пропорциональности угловой частоты вращения ротора генератора его ЭДС при постоянном значении потока возбуждения.
Различают тахогенераторы переменного тока (синхронные и асинхронные) и постоянного тока.
· Тахогенераторы постоянного тока — небольшие коллекторные машины, поток возбуждения в которых создаётся постоянным магнитом или независимой обмоткой.
· Тахогенераторы синхронного типа представляют собой небольшие синхронные машины с постоянным магнитом в качестве ротора.
· Асинхронные тахогенераторы (получили наибольшее распространение) по конструкции подобны асинхронным электродвигателям с полым короткозамкнутым ротором. На статоре такого тахогенератора расположены под углом 90° две обмотки, одна из которых (обмотка возбуждения) питается переменным током постоянной частоты и постоянного напряжения, а вторая является выходной, и к ней может быть подсоединён измерительный прибор (вольтметр, отградуированный, например, в об/мин).
19)Пара сельсинов в трансформаторном режиме как датчик угла рассоглосования
Ответ:(
20)СКВТ. Устройство. Основные характеристики. Симметрирование.
Ответ:(Выходные напряжения. На статоре этого трансформатора расположены обмотки В и К, а на роторе — обмотки S и С (см. рис. 5.24). При холостом ходе напряжения на синусной S и косинусной С обмотках ротора равны соответствующим ЭДС:
(5.49)
US0 = ES0 = kЕв sin θ; UC0 = EC0 = kЕв cos θ,
т.е. изменяются по требуемым законам. Аналогичный режим работы возникает в случае, когда нагрузка синуснокосинусного

|
| Рис. 5.26. Векторная диаграмма МДС при подключении нагрузки к синусной обмотке |
трансформатора представляет собой электронное устройство с большим входным сопротивлением.
Если к синусной обмотке S подключить некоторую нагрузку Z н S, то по обмотке пойдет ток
(5.50)
ÍS = ÉS /(ZS + ZнS),
где Z S — сопротивление обмотки S, которое считаем постоянным.
Ток I S создает МДС ротора F S. Как видно из рис. 5.26, ось этой МДС совпадает с осью фазы S, поэтому ее можно представить в виде суммы двух составляющих: продольной FSd = FS sin θ и поперечной FSq = FS cos θ. Продольная составляющая F Sd создает в обмотке возбуждения В компенсирующий ток, МДС которого F в, так же как и в двухобмоточном трансформаторе, компенсирует действие F Sd.
Результирующий продольный поток Фd индуцирует ЭДС в обмотке S
(5.51)
ESd = kEв sinθ.
Поперечная составляющая F Sq создает во вращающемся трансформаторе поперечный поток Фq. Относительно поперечного потока Фq обмотка S является косинусной и, следовательно, в ней индуцируется ЭДС
(5.52)
ESq = 4,44f1 w2 ko62 Фqm cos θ = CFS cos2 θ,
где С — постоянная.
Таким образом, при нагрузке в синусной обмотке кроме требуемой ЭДС, пропорциональной синусу угла поворота θ, индуцируется ЭДС, пропорциональная току нагрузки и квадрату косинуса θ. Эта добавочная составляющая ЭДС вызывает появление погрешностей. Аналогично в косинусной обмотке при нагрузке поперечным потоком Фq индуцируется добавочная ЭДС E Cq, пропорциональная току нагрузки и квадрату синуса θ, которая также вызывает появление погрешностей.
Для устранения погрешности вращающегося трансформатора, обусловленной поперечным потоком Фq, применяют так называемое симметрирование трансформатора, т. е. компенсацию поперечного потока ротора. Существует два способа симметрирования: вторичное (со стороны ротора) и первичное (со стороны статора).

| Рис. 5.27. Схема синусно-косинусного трансформатора со вторичным симметрированием и диаграмма МДС, создаваемых обмотками ротора |
Вторичное симметрирование. Для уменьшения погрешности выходного напряжения, снимаемого с синусной обмотки, подключают к косинусной обмотке сопротивление Z нС (рис. 5.27, а). В этом случае ток, проходящий по обмотке С, создает МДС F С, которую можно представить, так же как и МДС F S, в виде векторной суммы двух составляющих (рис. 5.27,б): продольной FСd = FС cos θ и поперечной FCq = FС sin θ. Продольная составляющая F Cd совпадает по направлению с F Sd, a поперечная составляющая F Cq направлена против F Sq. При F Cq = F Sqпоперечный поток Фq = 0. Следовательно, не возникает и погрешность, обусловленная этим потоком. Сопротивление Z нС, при котором обеспечено полное симметрирование, можно определить из условия
(5.53)
FS cos θ = FC sin θ
или с учетом значений F S и F C
(5.54)
ZS + ZнS = ZC + ZнC,
т. е. полное симметрирование наблюдается при равенстве комплексных сопротивлений в цепи обмоток S и С ротора, т. е. их активных и реактивных составляющих. При вторичном симметрировании компенсируются МДС по поперечной оси; кроме того, ток I в в обмотке возбуждения поворотного трансформатора не зависит от угла поворота, так как в формулу для результирующей продольной составляющей МДС ротора F́2d = F́Sd + F́Cd (определяющей силу тока I в) не входит какаялибо функция угла θ:
| F́2d = F́S sin θ + F́C cos θ = |
| sin θ + |
| cos θ = |
| Éв, |
где Z 2 = Z S = Z C ; Z н = Z нS = Z нC.
В результате уменьшается погрешность поворотного трансформатора.
Рассмотренный метод симметрирования практически применим только при постоянном сопротивлении нагрузки, что является его недостатком.
Первичное симметрирование. Для уменьшения погрешности выходного напряжения снимаемого, например, с обмотки S (рис. 5.28, а), компенсационную обмотку К статора замыкают на какое-либо малое сопротивление Z K или накоротко. В этом случае по поперечной оси вращающегося трансформатора действует результирующая МДС
(5.55)
Fq = FSq + FK,
где F K — МДС, создаваемая компенсационной обмоткой.
Так как обмотка К относительно поперечного потока Фq представляет собой замкнутую накоротко вторичную обмотку трансформатора, то ее МДС F́ K направлена против МДС F́ Sq«первичной» обмотки, и результирующая МДС Fq, так же как и в трансформаторе тока, значительно

| Рис, 5.28. Схемы синусно-косинусных вращающихся трансформаторов |
меньше МДС F Sq. Поэтому поперечный поток Фq и вызванная им погрешность резко уменьшаются. При изменении нагрузки, подключенной к обмотке ротора, МДС F K изменяется примерно пропорционально МДС F Sq, вследствие чего степень компенсации поперечного потока остается практически неизменной. Это является достоинством данного метода симметрирования. Однако при изменении угла поворота ротора θ изменяется ток I в в обмотке возбуждения и при заданном напряжении Ú в изменяется ЭДС É в. В результате появляется дополнительная погрешность в значении выходных напряжений Ú S и Ú C на зажимах синусной и косинусной обмоток. Поэтому во вращающихся трансформаторах обычно применяют одновременно первичное и вторичное симметрирование (рис. 5.28,б). Рассмотренные методы компенсации поперечного потока Фq позволяют использовать в качестве выходной как синусную, так и косинусную обмотки. Поэтому вращающийся трансформатор, включенный по схеме, изображенной на рис. 5.28,б, называют синусно-косинусным.
21)Магнитный усилитель. Устройство. Принцип работы.
Ответ: Магнитный усилитель — это статический аппарат, предназначенный для управления величиной переменного тока посредством слабого постоянного тока. Применяется в схемах автоматического регулирования электродвигателей переменного тока.
Принцип действия
Работа магнитного усилителя основана на нелинейности характеристики намагничивания магнитопровода. На крайних стержнях магнитного усилителя находится рабочая обмотка, которая состоит из двух катушек, соединённых последовательно. На среднем стержне размещается обмотка управления из большого количества витков W=. Если ток в неё не подаётся, а к рабочей обмотке, соединённой последовательно с нагрузкой, подведено переменное напряжение U~, то из-за малого количества витков W~ магнитопровод не насыщается, и почти всё напряжение падает на реактивном сопротивлении рабочих обмоток Z~. На нагрузке в этом случае выделяется малая мощность.
Если теперь пропустить по обмотке управления ток Iу, то даже при небольшом его значении (из-за большого W=), возникает насыщение магнитопровода. В результате реактивное сопротивление рабочей обмотки резко уменьшается, а величина тока в цепи — увеличивается. Таким образом, посредством малых сигналов в обмотке управления можно управлять значительной величиной мощности в рабочей цепи магнитного усилителя.
В простейшем случае магнитный усилитель — это управляемая постоянным током индуктивность, которая включается в цепь переменного тока последовательно с нагрузкой. При большой индуктивности ток в последовательной цепи и в нагрузке маленький, при малой индуктивности ток в последовательной цепи и в нагрузке большой. Существует целый ряд разработок, в которых магнитный усилитель используется для удвоения частоты, бесконтактного переключения токов (бесконтактные реле), для стабилизации напряжения питания, для модуляции сигналов ВЧ сигналами НЧ.
В последнее время магнитный усилитель был частично потеснён полупроводниковыми приборами, но в ряде применений по-прежнему не имеет конкурентов.
| Характеристика | Магнитный усилитель | Полупроводниковый усилитель |
| Управляемый ток | ВЧ | постоянный |
| Управляющий ток | постоянный или НЧ | ВЧ |
| Чувствительность | 10−19 Вт | ? |
| Освоенная мощность | до 500 МВА | свыше 10 МВА |
| К-т усиления 1 каскада | до 106 | до 106 |
| Рабочая температура | от 0К до 500°С | (от −40 до +80)°С, расширение диапазона требует научных исследований и создания новых материалов и технологий |
| Рабочее напряжение | не ограничено | около 3 кВ |
[ править ]Применение
Основное назначение — управление силовым электроприводом (распространены в строительной технике), также применялись в бытовых стабилизаторах переменного тока, в регуляторах освещения киноконцертных залов, в двоичной ЭВМ ЛЭМ-1 Л. И. Гутенмахера и в троичных ЭВМ «Сетунь» и «Сетунь-70» Н. П. Брусенцов а также в цепях управления тепловоза [1][2][3] .
По-прежнему магнитные усилители используются в системах, измеряющих постоянные токи от тензодатчиков. Гибридные схемы, сочетающие в себе миниатюрный магнитный усилитель с полупроводниковым, легко решают проблему дрейфа нуля и обладают высокой точностью.
Магнитный усилитель позволяет бесконтактно измерять постоянные токи в линиях электропередач. В последнее время для этого всё чаще применяют более компактные датчики Холла.)
22)

