




Л.15. ИСОН на основе БИИМ с измерительным блоком на лазерных гироскопах
Содержание
- Введение
- Исходные положения
- Стендовые испытания
- Влияние внешнего магнитного поля
- Выводы
- Приложение: ИИМ на ЛГ КМ-11, основные технические характеристики
Введение
БИНС на ЛГ- Mk.49 ф. SPERRY и HONEYWELL (США). [http://www.sperry-marine.com].
| Характеристика | Значение |
| Точность выработки курса | 
|
| Точность выработки углов бортовой и килевой качек | 
|
| Точность хранения координат |  за 24 ч за 24 ч
|
| Масса | 381 кг (840 Фунтов.) |
| Высота | 169.7 cm (66.8 дюймов) |
| Ширина | 59.7 cm (23.5 дюйма) |
| Глубина | 73.3 cm (28.9 дюймов) |
| Потребляемая мощность | 600 Вт |
| Температура хранения Рабочая температура | от -40 до +70оС от 0 до +50оС |
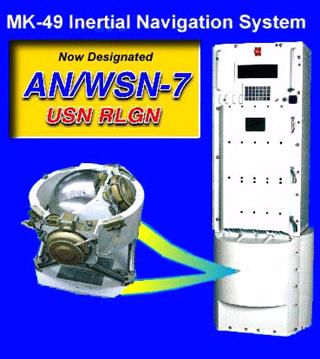
Рис.В1а. Общий вид БИНС Мк.49
Рис.В1б. Карданов подвес, обеспечивающий вращение ИИБ относительно двух осей
( - оси чувствительности ЛГ;
- оси чувствительности ЛГ;  - оси чувствительности акселерометров; A-A, B-B - оси вращения; 1, 2 - датчики угла; 3 - подвижная рама; 4 - неподвижное основание; 5 – ось)
- оси чувствительности акселерометров; A-A, B-B - оси вращения; 1, 2 - датчики угла; 3 - подвижная рама; 4 - неподвижное основание; 5 – ось)
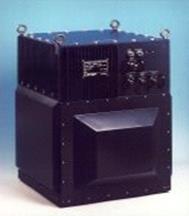
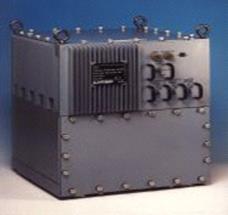
БИНС на ЛГ - PL41, MK4
Фирмой LITEF (дочернее отделение в ФРГ фирмы LITTON, США) разработана корабельная БИНС на лазерных гироскопах: MOD1 (Рис. В2а.) и MOD2 (Рис. В2б).
|
|
Рис. В2а Рис. В2б
Исходные положения
В НИИ «Полюс» был создан бескарданный инерциальный измерительный модуль (ИИМ) на основе изготавливаемых ранее лазерных гироскопов (ЛГ) КМ-11, основные особенности которых состоят в следующем:
- резонатор кольцевого лазера ЛГ образован призмами с полным внутренним отражением, что позволяет получить потери нагруженного резонатора не более 0.02…0.03 % и область захвата не более 70…150 гц без использования сложных в технологии высококачественных многослойных диэлектрических зеркал;
- накачка He-Ne активной среды лазера осуществляется безэлектродным поперечным высокочастотным разрядом, что позволяет исключить смещение нуля ЛГ, присущее разряду постоянного тока, отказаться от высоковольтного питания лазера, упростить конструкцию вакуумной части прибора и обеспечить наработку на отказ в десятки тысяч часов;
- регулировка частоты генерации кольцевого лазера осуществляется пневматически, без использования подвижных элементов и при низковольтном питании (=24В);
- технология сборки позволяет проводить «горячую» юстировку элементов, селектирующих основную моду при наличии свободной, многомодовой генерации в кольцевом лазере.
Для исключения влияния зоны нечувствительности ЛГ вместо вибрации каждого из гироскопов применено реверсное вращение всего ИИМ вокруг оси, ортогональной плоскости палубы объекта. Ось вращения располагается по продольной оси трехгранной пирамиды, на гранях которой закреплены ЛГ, что приводит к смещению рабочей зоны от зоны нечувствительности для каждого гироскопа. Кроме того, данное вращение обеспечивает наблюдаемость дрейфов ЛГ и автокомпенсацию их проекций на плоскость, ортогональную оси вращения ИИМ. Реверс осуществляется через каждые два оборота (1 оборот за 3.6 сек) и быстро (за 0.01…0.02 сек), что не приводит к существенному возрастанию погрешностей.



Рис. В3а. ИИМ на ЛГ КМ-11
(1 - ЛГ в магнитных экранах; 2 – акселерометры; 3 – электронные модули; 4 – дюралевый конус; 5 – призма из ситалла)
 | |||
 |
Были проведены стендовые испытания экспериментального образца данного ИИМ, при этом с частотой 200 гц и продолжительностью около 6 час на каждом румбе фиксировались выходные данные ИИМ (квазикоординаты): приращения углов поворота ИИМ в осях модуля - от ЛГ, первый интеграл от проекций на оси ИИМ вектора кажущегося ускорения - от линейных акселерометров, угол реверсивного вращения ИИМ – от датчика угла.
Реализации записаны на 3-х румбах, при известном начальном положении ИИМ относительно географических осей.
1. Математическое обеспечение ИСОН разработано в MATLAB (Simulink).
К особенностям решения на частоте 200 гц (шаг дискретности  ) задачи ориентации ИБ БИИМ следует отнести использование в качестве входных данных квазикоординат: приращений угла поворота ИБ от ЛГ и первых интегралов от данных акселерометров на рабочей частоте, вычисление в качестве промежуточного кинематического параметра вектора Эйлера (используется разложение по Бранцу), затем кватерниона на основе параметров Родрига-Гамильтона и матрицы направляющих косинусов.
) задачи ориентации ИБ БИИМ следует отнести использование в качестве входных данных квазикоординат: приращений угла поворота ИБ от ЛГ и первых интегралов от данных акселерометров на рабочей частоте, вычисление в качестве промежуточного кинематического параметра вектора Эйлера (используется разложение по Бранцу), затем кватерниона на основе параметров Родрига-Гамильтона и матрицы направляющих косинусов.
Предусмотрен обсервационный режим работы ИСОН (с GPS) - имитация запуска системы у стенки (1.0ч), затем обсервационный режим работы (GPS +относительный лаг) – имитация выхода в море (еще 0.5 ч), затем переход в автономный режим работы (с относительным лагом).
2. Для совместной обработки измерений ИИМ, GPS и лага использовался дискретный алгоритм фильтра Калмана 23-го порядка («румбовые» дрейфы ИИМ оценивались в осях объекта) с обратной связью по всему вектору состояния на каждом шаге измерений.
Дискретность измерений 1 с.
3. Имитировались шумы GPS:
· скоростных измерений  =0.1…0.3 м/с;
=0.1…0.3 м/с;
· позиционных измерений  =10…30 м;
=10…30 м;
и погрешности относительного лага:
· неучтенные морские течения – марковскими процессами 1 порядка  =0.2 м/с, Ткор.=1.5 ч;
=0.2 м/с, Ткор.=1.5 ч;
· инструментальные шумы лага  =0.3 м/с.
=0.3 м/с.
Стендовые испытания
Выставка (GPS – 0.5 ч) + режим гироазимута по всем осям


|

|


|

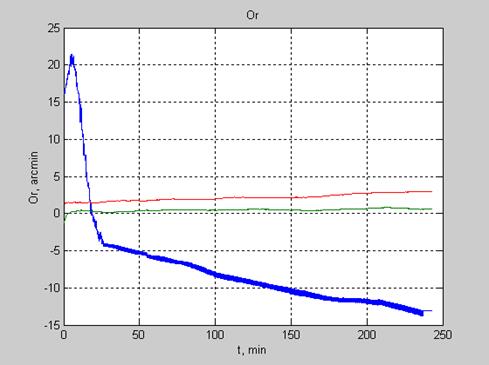
Рис.1a(avt_1a). Погрешности ориентации (угл. мин)
Примечание:


Реализация №1 (K=700)
Обсервационный режим (GPS –1ч) + обсервационный режим в море (GPS + лаг – 0.5ч) + автономный режим (лаг).
|

|


|
Рис.1n.1. Погрешности ориентации (угл. мин)

|

|

Рис. 1n.2. Погрешности составляющих вектора линейной скорости (м/с)

|


|

Рис. 1n.3. Погрешности координат (м)


|

|


|


Рис. 1n.4. Оценки дрейфов ЛГ в осях измерительного блока (град/ч)
|



|

|


Рис. 1n.5. Оценки погрешностей масштабных коэффициентов ЛГ в осях измерительного блока

|

|

Рис. 1n.6. Оценки румбовых дрейфов измерительного блока (град/ч
Влияние внешнего магнитного поля
(поле Земли – 1ч; +2Э - 2ч; поле Земли – 3ч; +5Э - 4ч; поле Земли – 5ч;.....)
Выставка (GPS – 0.5 ч) + режим гироазимута по всем осям)
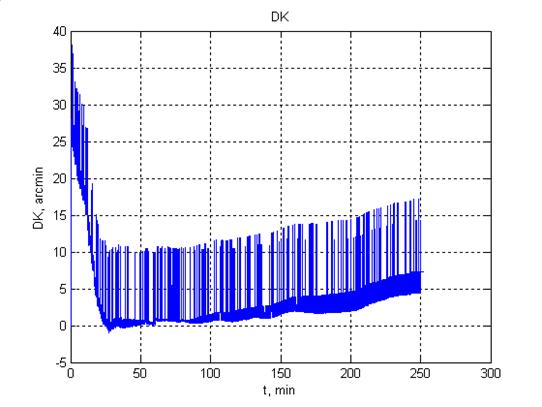
Рис. 2.1.
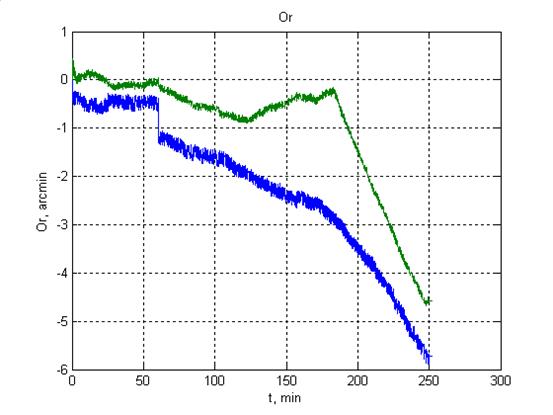
Рис. 2.2
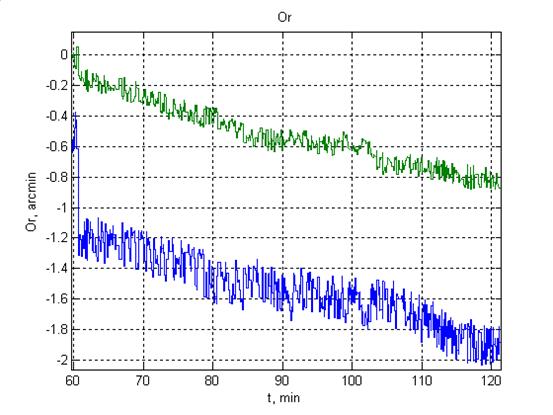
Рис. 2.2а:+2 Э. Dr - 0.01; - 0.01
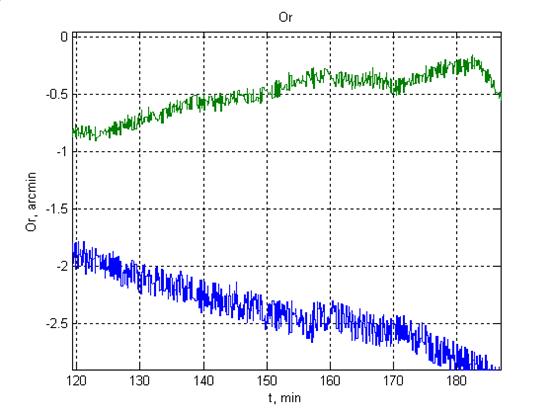
Рис. 2.2б:+0 Э. Dr - 0.01; + 0.01.
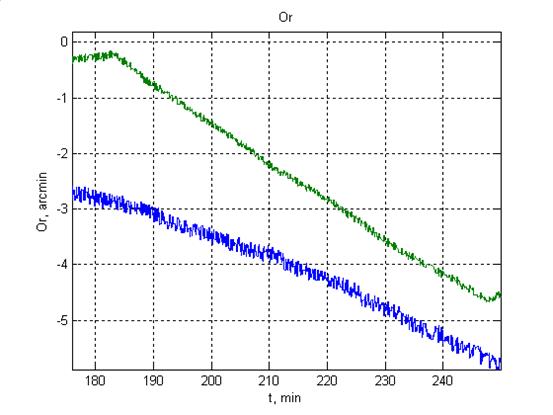
Рис. 2.2с:+5 Э. Dr - 0.04; - 0.05
Выводы
1. Погрешности интегрированной системы по курсу в обсервационном режиме в условиях стенда не превышают 2…3 угл.мин, а в автономном режиме – 6 угл.мин.
2. Нестабильность корпусных дрейфов в одном пуске находится в пределах 0.01 град/ч, румбовые дрейфы (влияние аномального магнитного поля) достигают уровня: - 0.01 град/ч на 1Э. Время калибровки дрейфов лежит в пределах: по осям X,Y - 2 ч; по оси Z – 6 ч.
Приложение.

