




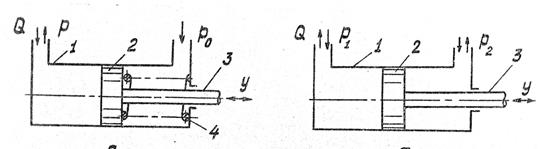
Рис. 5.1.
Принцип работы УУ основан на законе сохранения расходов:
Q1 = Q + Q2.
Функциональная схема усилителя типа сопло-заслонка изображена на рис. 5.1, б. Входным сигналом усилителя является перемещение заслонки «х», выходным – давление р и расход жидкости Q, подвод внешней энергии – рпит.
5.2.1.2. Алгоритм функционирования
X ® Q2 ®¯ Q ®¯р
Таким образом, дроссельный усилитель типа «сопло-заслонка» преобразует входное механическое перемещение заслонки Х в изменение расхода Q или давления р рабочей жидкости (газа) на выходе.
5.2.1.3. Статические и динамические характеристики
Статическую характеристику усилителя можно получить из условия равенства расходов жидкости через дроссель постоянного сечения и через управляемый дроссель 2, т.е.
Q1 = Q2 + Q (5.1)
Известно, что расход жидкости через дросселирующие элементы пропорционален площади проходного сечения и зависит от перепада давления на нем. Чаще всего принимают, что расход либо прямо пропорционален перепаду давлений, либо пропорционален корню квадратному их перепада.
Величина Q определяется конструктивными особенностями исполнительного устройства. Для расходов Q1 и Q2 получим:
Q1 = m1 f1  , (5.2)
, (5.2)
Q2 = m2 f2  , (5.3)
, (5.3)
где Q1 и Q2 - объемные расходы жидкости;
m 1 и m2 - коэффициенты расхода, зависящие от числа
Рейнольдса, изменяющиеся в пределах 0,5…0,7;
f1 и f2 - площадь проходного сечения нерегулируемого
дросселя и эффективная площадь проходного
сечения регулируемого дросселя;
r - плотность жидкости;
P сл - давление среды, в которую происходит
истечение жидкости (давление слива).
Подставим зависимости (2) и (3) в равенство (1). Тогда, полагая, что
f2 = K x, где  , получим:
, получим:
X =  (5.4)
(5.4)
В конкретных устройствах обычно рпит, рсл, f1 и m 1 практически постоянны. Рассматривая небольшое изменение (по участкам), значения m2 и К можно считать постоянным.
Статическая характеристика дроссельного усилителя типа сопло-заслонка (выражение 5.4) приведена на рис. 5.2.
 |
 P рабочий диапазон
P рабочий диапазон
Q=0
Q1> Q
Q11> Q1
0 x
Рис 5.2.
Рабочий диапазон УУ стараются выбрать на участке характеристики, близком к линейному. Тогда в рабочем диапазоне р = KX, где К – коэффициент усиления, зависит от (р пит – рсл) и  :
:
(R пит - R сл) ® K, ® К,
зависит от формы поперечного сечения сопла и его размеров.
Наибольший К получается при поперечном сечении сопла – прямоугольном. Но изготовление сопла прямоугольной формы связано с технологическими трудностями, поэтому чаще применяется круглое сопло:
dc = (0,5 – 1,5 мм); d заслонка = (3 – 4) dc
Если при работе рпит и рс меняются, то становится нестабильной характеристика усилителя. Для улучшения статических характеристик УУ необходимо поддерживать постоянный перепад давления на дросселе 1, тогда р будет зависеть только от Х, но это усложняет конструкцию, так как требуется регулятор постоянного перепада.
Для увеличения коэффициента усиления могут применяться двух-, трех- и более каскадные усилители. Однако, такие усилители являются более сложными устройствами по сравнению с однокаскадными усилителями.
По своим динамическим характеристикам усилитель типа «сопло-заслонка» можно считать пропорциональным (усилительным) звеном, если пренебречь сжимаемостью рабочего тела.
Для улучшения динамических характеристик необходимо максимально уменьшить силы сухого трения и инерционность элементов усилителя. С этой целью ось заслонки устанавливают в подшипниках, саму заслонку по габаритам и массе выполняют минимальной. Уменьшение габаритов и массы производят до разумного предела – не в ущерб прочности.
5.2.1.4. Эксплуатационная надежность и стабильность характеристик. Возможные неисправности
Достоинства УУ: просто по конструкции, имеет высокую надежность, чувствительность и быстродействие, требует незначительных усилий для перемещения заслонки. Однако оно обладает рядом недостатков:
- непроизводительные расходы рабочей жидкости;
- необходимость обеспечения в эксплуатации достаточно высокой степени фильтрации рабочей жидкости, особенно при эксплуатации в запыленных районах.
Нестабильность характеристик вызвана, главным образом, изменением температуры окружающей среды и рабочего тела, что приводит к изменению упругости пружин, входящих в усилительные устройства.
С целью устранения «вредного» влияния температуры под пружины устанавливаются термокомпенсаторы, представляющие собой набор биметаллических пластин.
Настройка выполненного УУ осуществляется подбором дросселя 1. Так как часть рабочей жидкости сливается через сопло 2, то увеличивается чувствительность УУ, уменьшается вероятность перегрева или переохлаждения рабочей жидкости.
Разновидность дроссельного усилителя типа «сопло-заслонка» являются маятниковые усилители (бесконтактные клапаны).Они бывают одноплечевые (рис.5.3, а.) и двухплечевые (рис. 5.3, б.).
 + у - + у -
+ у - + у -
1 1
а) 2 2 б)
Рпит р Q рпит р Q
Рис. 5.3.
УУ маятникового типа состоит из маятникового клапана 1 и канала 2, соединенного с ИУ. Положение клапана, а, следовательно, и расход жидкости в канале 2, определяется координатой y, являющейся выходным сигналом измерительного устройства. Характеристики маятниковых усилителей аналогичны УУ «сопло-заслонка».
Возможные неисправности таких усилительных устройств связаны, главным образом, с загрязнением рабочего тела, что может привести к засорению регулируемого жиклера или заклиниванию подвижного маятника. Эти неисправности приводят к выходу из строя усилительных устройств.
С целью недопущения отказов необходим тщательный контроль за чистотой рабочего тела (топлива в системе топливопитания, масла в системе смазки, жидкости АМГ-10 или применяемых газов) в эксплуатации.
Усилительное устройство типа «сопло-заслонка» применяется в САУ частотой вращения роторов вертолетного ГТД ТВ3-117, в системе управления расходом топлива в ФКС двигателя АЛ-31, в топливном автомате запуска двигателя НК-25.
Усилительные устройства маятникового типа:
-одноплечевые - применяются в САУ частотой вращения двигателей АЛ-21Ф, АЛ-31, НК-25;
-двухплечевые – в САУ GТФ по внешним условиям АЛ-31.
Б. Дроссельный золотниковый усилитель
5.2.1.1. Принцип действия, особенности конструктивного выполнения
Дроссельные золотниковые усилители бывают одностороннего действия и двухстороннего действия.
Золотниковый дроссельный усилитель двустороннего действия (рис. 5.4.) состоит:
1. корпуса (гильзы);
2. канала подвода рабочей жидкости к ИсУ.
3. золотника;
4. канала подвода рабочей жидкости с давлением рпит.
 Рпит
Рпит
 |
Рис. 5.4
Пояски золотника выполняют функцию дросселирующего элемента. Золотники бывают:
1. идеальными (ширина пояска П равна ширине окна гильзы К);
2. проточными (П < К);
3. отсечными (П > К).
5.2.1.2. Алгоритм функционирования
В УУ двустороннего действия при перемещении золотника вправо в правый канал 2 подводится жидкость с давлением р, а левый канал 2 соединяется со сливом. Перепад давлений в каналах зависит от величины перемещения Х золотника.
5.2.1.3. Статические и динамические характеристики
Статическая характеристика дроссельного золотникового усилителя представлена на рис.4.в., где изображены характеристики для трех золотников:













 1.идеального; 2. проточного (П < К); 3.отсечного (П > К).
1.идеального; 2. проточного (П < К); 3.отсечного (П > К).
р 1 2 3
 |
0 х
Рис. 5.5
Все дроссельные усилительные устройства по динамическим свойствам можно считать усилительными (пропорциональными) звеньями.
5.2.1.4. Эксплуатационная надежность и стабильность характеристик. Возможные неисправности
Чувствительность дроссельного золотникового усилителя зависит от ширины поясков золотника. Наибольшей чувствительностью к сигналам управления от ИУ отличается проточный золотник, наименьший – золотник с перекрытием. Настройка данного УУ осуществляется подбором диаметра дросселя 1.
Для улучшения динамических характеристик необходимо уменьшать массу золотника (применение полых золотников, уменьшение размеров золотников).
Достоиства: золотниковый усилитель имеет высокий КПД, и коэффициент усиления, его характеристики мало зависят от изменения температуры.
Он обладает повышенной чувствительностью к загрязнению рабочей жидкости, так как загрязнение может привести к «схватыванию» (заклиниванию) трущейся пары. Для компенсации этого недостатка на поясках золотника выполняются кольцевые проточки, в которых собираются посторонние частицы, попадающие в жидкость. В эксплуатации авиационной техники требуется тщательный контроль за чистотой рабочей жидкости. Из-за износа возможно появление люфтов в соединениях, что может привести к появлению зон нечувствительности. Дроссельный золотниковый усилитель сложен в изготовлении, так как пара «гильза-золотник» требует специальной подгонки, что значительно удорожает процесс их производства.
Дроссельные золотниковые усилители получили широкое распространение в САУ летательным аппаратом и его силовой установки. Применяется в САУ частотой вращения, в системе ограничения максимального значения частоты вращения ротора низкого давления, в автомате приемистости, в системе управления осевым компрессором двигателей Д-30КП, Д-30КУ, в системе блокировок включения форсажных контуров двигателей АЛ-31, НК-25, в системах управления компрессором и реактивным соплом двигателя АЛ-21Ф.
5.2.2. Электрогидравлические усилители
Электрогидравлические усилители можно разделить на усилители:
- с релейной характеристикой (одно- и двухтактные);
- с пропорциональной характеристикой.
А. Электрогидравлические усилители с релейной характеристикой (одно- и двухтактный)
5.2.2.1. Принцип действия, особенности конструктивного выполнения
 |
Электрогидравлические усилители предназначены для усиления и
Рис. 5.6
Рис. 5.7
преобразования входного электрического сигнала в выходной сигнал – давление и расход жидкости в гидравлических магистралях.
Однотактный электрогидравлический усилитель с релейной характеристикой (рис. 5.7) содержит управляющую обмотку 1, сердечник 2 и золотник 4, в котором выполнены сверления. Входным сигналом усилителя является напряжение, подаваемое на управляющую обмотку, а выходным – давление и расход жидкости в рабочем канале.
Двухтактный электрогидравлический усилитель (рис. 5.6) состоит из двух электромагнитов 1 и 6, двух шариковых клапанов 2 и 5 с пружинами 3 и 4, корпуса 5. Входным сигналом двухтактного электрогидравлического усилителя является напряжение, подаваемое на один из электромагнитов, а выходным – разность давлений в рабочих каналах.
К каждому электрогидравлическому усилителю подводится рабочее тело с давлением питания рпит от источника энергии, что и позволяет усилить слабый электрический сигнал.
5.2.2.2. Алгоритм функционирования
В управляющую обмотку 1 однотактного релейного усилителя подается входной сигнал. Сердечник 2, втягиваясь в катушку, переместит золотник 4, преодолев усилие пружины 6. Проточка в золотнике соединит магистраль питания с выходным каналом. При обесточенной обмотке пружина перемещает золотник вправо и магистраль питания будет отключена от выходного канала, который соединится со сливом.
При подаче питания на электромагнит 1 двухтактного электро-гидравлического усилителя сердечник со штоком выталкивает шарик 2 вправо, преодолевая усилие пружины. При этом давление рпит поступает в канал II. Поскольку на электромагнит 6 питание не подается, то шарик 5 усилием пружины 4 отжат вправо, соединяя канал I со сливом. На выходе усилителя появляется разность давлений Dр= (р2 –р1), которая поступает к исполнительному устройству. Электрогидравлический усилитель работает по аналогии, если питание подается на электромагнит 6, а на электромагнит 1 не подается.
5.2.2.3. Статические и динамические характеристики
Статическая характеристика однотактного электрогидравлического усилителя имеет вид:
 |
Р
0 Uвх
Рис. 5.8
Статическая характеристика двухтактного электрогидравлического усилителя имеет вид:
 |
 р
р
0 Uвх
Рис. 5.9
Динамические свойства электрогидравлических усилителей могут быть представлены характеристиками запаздывающего звена:
Dр = K Uвх (t – tср);
где Uвх - конечное установившееся значение входного сигнала;
K =  - коэффициент усиления;
- коэффициент усиления;
tср - время срабатывания.
5.2.2.4. Эксплуатационная надежность и стабильность характеристик. Возможные неисправности
Основными недостатками электрогидравлических усилителей является существенная нелинейность его статической характеристики, что не всегда приемлемо для качественной работы АС; а также высокие требования, предъявляемые к чистоте рабочего тела.
К достоинствам относятся относительно высокое быстродействие и легкость преобразования выходного сигнала перемещения золотника (шариковых клапанов) в сигнал давления рабочего тела.
Б. Электрогидравлический усилитель с пропорциональной характеристикой
5.2.2.1. Принцип действия, особенности конструктивного выполнения
Конструкция усилителя включает: два электромагнита 1, 3, якорь 2, заслонки 4, сопла 5, пружины 6, жиклеры 8 постоянного сечения. Заслонки 4 и сопла 5 образуют два дроссельных гидравлических усилителя типа "сопло-заслонка". При отсутствии питания на электромагнитах якорь занимает нейтральное положение. Это обеспечивается пружинами 6. Заслонки 4 занимают одинаковое положение относительно сопел 5. Рабочая жидкость с давлением рпит. подводится из входной магистрали. Так как зазоры между соплом и заслонкой в правом и левом усилителях одинаковы, то величина слива рабочей жидкости в них также будет одинакова. Поэтому давление рабочей жидкости в правой и левой рабочих магистралях будет одинаковым, а разность давлений Dр=р2-р1 равна нулю.
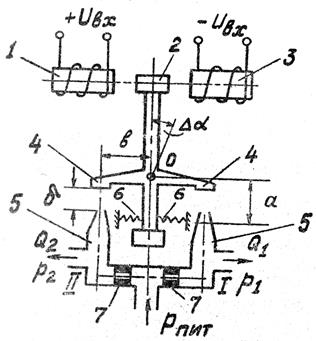 |
Рис. 5.10
5.2.2.2. Алгоритм функционирования
При подаче электрического сигнала на левый электромагнит 1 якорь поворачивается против часовой стрелки, сжимая правую пружину 6. При этом возрастет момент сопротивления повороту якоря. Как только момент, создаваемый пружиной 6, сравняется с моментом от электромагнита 1, якорь остановится. Важно отметить, что чем больший по величине электрический сигнал будет подаваться на электромагнит, тем больший угол поворота должен совершить якорь для достижения равенства моментов. В процессе поворота якоря левое сопло 5 прикрывается заслонкой 4, а правое - открывается. В результате этого слив жидкости через левое сопло уменьшится, а через правое - возрастет. Поэтому расход и рабочее давление жидкости в левой рабочей магистрали возрастает, а в правой – уменьшается. Разность давлений в рабочих каналах Dр=р2-р1 возрастет. При подаче электрического сигнала на правый электромагнит 3 (сигнал противоположного знака) значение перепада рабочего давления жидкости на выходе из усилителя также изменится на противоположное. Таким образом, входным сигналом усилителя является напряжение электрического тока, а выходным – разность давлений и расход жидкости в рабочих каналах.
5.2.2.3. Статические и динамические характеристики
Статическая характеристика электрогидравлического усилителя с пропорциональной характеристикой имеет вид:
 |
Dр
0 Uвх
Рис. 5.11
Динамические характеристики: как правило, такие усилители работают совместно с гидроцилиндрами и поэтому при инженерных расчетах инерционностью усилителей можно пренебречь, считая их усилительным звеном.
5.2.2.4. Эксплуатационная надежность и стабильность характеристик. Возможные неисправности
Достоинством таких электрогидравлических усилителей является наличие пропорциональной зависимости между входным и выходным сигналами, а также то, что изменение знака входного сигнала вызывает изменение знака выходного сигнала.
Недостатком электрогидравлических усилителей с пропорциональной характеристикой является их значительная инерционность. Поэтому их желательно использовать в таких системах, для которых не предъявляются высокие требования и быстродействию.
5.2.3. Усилители электрических сигналов
Существует большое количество типов усилителей электрических сигналов. По принципу действия усилители электрических сигналов подразделяются на релейные, электронные, электромагнитные.
А. Релейные усилители
5.2.3.1. Принцип действия, особенности конструктивного выполнения
Релейные усилители – это устройства, в которых при плавном изменении входной величины выходная величина изменяется ступенчато.
Релейные усилители способны при помощи цепи с малой энергией тока замыкать контакты электрической цепи большей мощности. Принцип действия электрических усилителей – электромагнитный.
Основными элементами электромагнитного реле являются: магнитопровод 1, якорь 4, катушка 2, противодействующая пружина 3.
5.2.3.2. Алгоритм функционирования
При подаче входного напряжения Uвх на катушку электромагнита якорь замыкает контакты, обеспечивая более мощный выход сигнала.По виду характеристик релейные усилители с электромагнитным реле подразделяются на однотактные (релейные) и двухтактные (поляризованные).
5.2.3.3. Статические и динамические характеристики
На рис. 5.б. представлена статическая характеристика релейного усилителя.
 |
Uвых
Uвх
Рис. 5.12
5.2.3.4. Эксплуатационная надежность и стабильность характеристик. Возможные неисправности
Достоинством релейных усилителей являются:
1.Простота конструкции;
2.Большое усиление по мощности.
3.Возможность суммирования нескольких входных сигналов.
Недостатки:
1.Нелинейная характеристика;
2.Наличие контактов, склонных к “залипанию.”
3.Запаздывание в срабатывании (0,0001 ¸ 0,1)с.
Б. Магнитный усилитель
5.2.3.1. Принцип действия, особенности конструктивного выполнения
Магнитный усилитель предназначен для усиления сигнала в виде переменного тока.
Магнитный усилитель простейший схемы включает: сердечник, с двумя обмотками. Входной сигнал в виде напряжения постоянного тока Uупр подается на обмотку управления 3. Рабочая обмотка 2 подключена последовательно с сопротивлением нагрузки Rн к источнику переменного тока. Выходной сигнал снимается в виде падения напряжения на сопротивлении Rн. Принцип действия магнитных усилителей состоит в том, что при изменении величины тока в обмотке управления принудительно изменяется магнитная проницаемость сердечника за счет подмагничивания его магнитным полем катушки управления. При этом индуктивное сопротивление рабочей обмотки резко снижается.
5.2.3.2. Алгоритм функционирования
При изменении напряжения на обмотке управления снижается магнитная проницаемость сердечника, что приводит к снижению индуктивного сопротивления рабочей обмотки. Поскольку сопротивление нагрузки, с которого снимается выходной сигнал, соединено последовательно с рабочей обмоткой, то падение напряжения на нем (выходной сигнал) возрастет.
5.2.3.3. Статические и динамические характеристики
В рабочем диапазоне статическая характеристика магнитного усилителя может быть описана зависимостью: Uвых=кUвх
Динамические свойства усилителя описывается уравнением динамики апериодического звена с постоянной времени 0,01 ¸ 0,05 с.
5.2.3.4. Эксплуатационная надежность и стабильность характеристик. Возможные неисправности
Достоинствами магнитного усилителя являются:
- высокая эксплуатационная надежность;
- высокий КПД;
- большой коэффициент усиления.
К недостаткам следует отнести:
- большой вес;
- значительные габариты;
способность работать только на переменном токе
5.3. Назначение и типы исполнительных устройств
Исполнительные устройства предназначены для непосредственного перемещения регулирующих органов.
Исполнительные устройства (ИсУ) в зависимости от вида подводимой энергии подразделяются на:
- гидравлические;
- пневматические;
- электрические;
- комбинированные.
Гидравлические ИсУ могут быть выполнены в виде:
-силовых цилиндров (гидроцилиндров) возвратно-поступательного действия (одностороннего и двухстороннего действия);
-силовых цилиндров (гидроцилиндров) поворотного (на угол<360о)действия (одностороннего и двухстороннего действия);
-гидромоторов (вращательного действия);
-мембранных ИсУ.
Наибольшее распространение в авиационных АС получили гидравлические ИсУ – гидроцилиндры.
5.4. Принцип действия, особенности конструктивного выполнения, алгоритмы функционирования элементов САУ и САР: исполнительных устройств
5.4.1. Силовые гидроцилиндры
А. Силовые гидроцилиндры двустороннего действия
5.4.1.1. Принцип действия, особенности конструктивного выполнения
Силовой цилиндр (рис.1.б) состоит из:
а) б)
Рис. 5.13.
- корпуса 1 со штуцерами подвода и отвода рабочей жидкости;
- поршня 2;
- штока 3;
Принцип работы силового цилиндра заключается в преобразовании энергии давления жидкости в перемещение поршня и связанного с ним штока. Входным сигналом силового цилиндра является разность давлений (D=р1-р2) в полостях цилиндра, а выходным – перемещение штока «у». Функциональная схема силового цилиндра одностороннего действия имеет вид:
 D р у
D р у
ИсУ
5.4.1.2. Алгоритм функционирования
При подаче давления в левую полость и сливе жидкости из правой полости на поршне формируется перепад давлений, под воздействием которого поршень перемещается вправо. При подводе давления в правую полость поршень будет перемещаться влево также за счет сил, создаваемых перепадом давлений.
5.4.1.3. Статические и динамические характеристики
По статическим характеристикам гидроцилиндры двустороннего действия относятся к астатическим интегрирующим элементам.
Статическая характеристика получается из условия равенства сил:
рж(Sп – Sш) – рслSп = F,
где Sп – площадь поршня, м2;
Sш – площадь поперечного сечения штока, м2;
F- усилие, приложенное к штоку поршня, Н.
Поскольку в выполненных конструкциях Sш<< Sп , площадью штока пренебрегают. Равенство сил при сделанном допущении имеет вид:
(рж – рсл)Sп = F (1)
Если в качестве входного сигнала рассматривать давление жидкости рж, а в качестве выходного - перемещение штока у, то статическая характеристика имеет вид: т.е. установившееся значение выходного сигнала
|
|
|
Рис. 5.14  (5.5),
(5.5),
или
у =  .
.
В безразмерной форме записи уравнение (5.5) имеет вид:
 , (5.6)
, (5.6)
где  ,
,  - безразмерные перемещения штока и расход рабочей жидкости;
- безразмерные перемещения штока и расход рабочей жидкости;
убаз, QЖбаз - базовые значения соответствующих параметров;
К=  - коэффициент усиления.
- коэффициент усиления.
Таким образом, по динамическим свойствам гидроцилиндры двустороннего действия относятся к интегрирующему звену.
Переходная функция:
 |
 h (t)
h (t)
Fn2 < Fn1
Fn1
0 t
Рис. 5.15.
Б. Силовые гидроцилиндры одностороннего действия
5.4.1.1. Принцип действия, особенности конструктивного выполнения
Силовой цилиндр одностороннего действия включает (Рис.): цилиндр 1, поршень 2, шток 3, пружина 4. Отличие гидроцилиндров одностороннего действия от гидроцилиндров двухстороннего действия заключается в том, что давление рабочей жидкости изменяется в одной из полостей (рабочей), а другая полость сообщена со сливом, при этом в ней обязательно находится возвратная пружина (пружинная полость). Входным сигналом гидроцилиндра является давление и расход жидкости, а выходным – перемещение штока.
5.4.1.2. Алгоритм функционирования
При подаче давления в левую полость поршень2 перемещается вправо, сжимая пружину. Как только сила от давления жидкости в левой полости сравняется с силой затяжки пружины, поршень остановится. Для перемещения поршня влево необходимо, чтобы сила затяжки пружины стала болье сил давления.
5.4.1.3. Статические и динамические характеристики
Статическая характеристика получается из условия равенства сил:
(р1 - рсл) Sп = F + Кпр у,
где Кпр – коэффициент жесткостипружины.
Статическая характеристика, т.е. зависимость выходного сигнала от входного для установившегося режима будет иметь вид:
 .
.
Графическое изображение статической характеристики имеет вид:
|
 где Dр=(р1 - рсл)
где Dр=(р1 - рсл)
|

 По статическим характеристикам гидроцилиндры одностороннего действия относятся к статическим элементам. Если рассматривать в качестве входного сигнала расход рабочей жидкости QЖ, то при условии постоянства расхода гидроцилиндр
По статическим характеристикам гидроцилиндры одностороннего действия относятся к статическим элементам. Если рассматривать в качестве входного сигнала расход рабочей жидкости QЖ, то при условии постоянства расхода гидроцилиндр
будет описываться уравнением 3 и по своим динамическим характеристикам относиться к интегрирующему звену. Однако, давление, действующее на поршень, пропорционально его перемещению за счет сжатия пружины: р1=  (5.7).
(5.7).
Для обеспечения постоянства расхода необходимо непрерывно увеличивать давление рЖ. На практике обычно поддерживается рЖ=const. При этом расход становиться величиной переменной, зависящей от перемещения поршня. Согласно закону Пуазейля, расход, подаваемый в рабочую (командную) полость гидроцилиндра, определяется по формуле:
 , (5.8)
, (5.8)
где r,l – радиус и длина трубопровода, по которому осуществляется подвод рабочей жидкости;
m - коэффициент кинематической вязкости.
Для получения динамических характеристик подставляем выражение (5.6) в уравнение расхода (5.7) с учетом (5.8) получаем дифференциальное уравнение гидроцилиндра:
Т 
 (5.),
(5.),
где ,  - безразмерные значения перемещения штока и давления рабочей жидкости,
- безразмерные значения перемещения штока и давления рабочей жидкости,
Т=  - постоянная времени гидроцилиндра,
- постоянная времени гидроцилиндра,
К=  - коэффициент усиления.
- коэффициент усиления.
Таким образом, по своим динамическим характеристикам гидроцилиндр одностороннего действия относится к инерционному звену.






 Переходная функция:
Переходная функция:
y(t) t» 3 T
Kпр ® ¯tp
Fn ® tp
 K
K
t
T
Рис.6.
5.4.1.4. Эксплуатационная надежность и стабильность характеристик. Возможные неисправности
Достоинствами гидроцилиндров являются простота конструкции, высокая надежность, высокая удельная мощность, высокое быстродействие, небольшие размеры, обеспечивают большие перестановочные усилия.
К недостаткам можно отнести ограниченность высотности действия из-за влияния давления и температуры окружающей среды на рабочую жидкость. При давлении рабочего тела на входе в насос меньшем упругости паров рабочего тела появляется выделение паров, при этом снижается давление рабочей жидкости.
Возможные неисправности
При попадании посторонних включений в рабочую жидкость возможно появление течи по уплотняющим манжетам штока гидроцилиндра, а также появление задиров или разрывов уплотняющей манжеты на самом поршне, что приводит к появлению перетекания рабочей жидкости из полости с высоким давлением в полость с низким давлением: это вызовет самопроизвольное перемещение поршня, а следовательно- и регулирющего органа.
5.4.2.Гидропривод
5.4.2.1. Принцип действия, особенности конструктивного выполнения
Гидравлический привод (ГП) – представляет собой совокупность гидравлического усилительного и гидравлического исполнительного устройств.
В качестве усилительных устройств в гидроприводе могут использоваться дроссельные золотниковые усилители или усилители типа «сопло-заслонка», в качестве исполнительных устройств – силовые гидроцилиндры двустороннего или одностороннего действия.
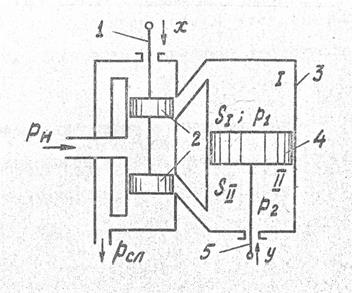
Рис. 5.17.
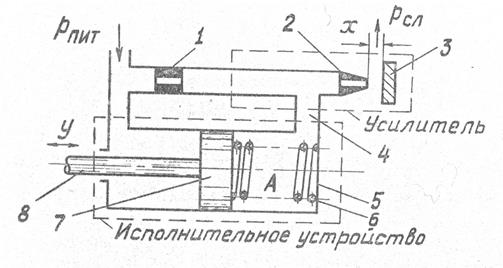
Рис. 5. 18.
Такие устройства используются в системах автоматического управления авиационных ГТД (АС частоты вращения ротора, АС температуры газа и т.д.)
Принципиальные схемы таких гидроприводов приведены на рис.7. и рис.8. Гидропривод с золотниковым дроссельным усилителем включает: золотник 2, корпус 3, поршень 4, шток 5. Его входным сигналом является перемещение золотника «х», а выходным – перемещение поршня – «у».
Входным сигналом для ГП является перемещение золотника или заслонки у, выходным перемещением штока поршня m.
Гидропривод с дроссельным усилителем типа сопло – заслонка включает: входной жиклер 1, сопло 2, заслонку 3, пружину 6, поршень 7, шток 8.
Функциональная схема гидропривода имеет вид:
|

 х у
х у
5.4.2.2. Алгоритм функционирования
При перемещении золотника вверх верхняя полость силового цилиндра соединяется с каналом высокого давления, а нижняя – с каналом слива. Под воздействием перепада давлений поршень будет перемещаться вниз. Для фиксации поршня в новом положении золотник необходимо вернуть в нейтральное положение.
5.4.2.3. Статические и динамические характеристики
Статические характеристики ГП зависят от типа гидроцилиндра, используемого в качестве исполнительного устройства.
ГП с гидроцилиндром двустороннего действия является астатическим интегрирующим элементом.
ГП с гидроцилиндром одностороннего действия – статическим элементом.
Динамические свойства ГП также определяются, в основном, типом применяемого гидроцилиндра.
Таким образом, по своим динамическим характеристикам ГП с идеальным золотником и с гидроцилиндром двустороннего действия относится к интегрирующим звеньям, а гидропривод с гидроцилиндром одностороннего действия являются по динамическим характеристикам -инерционным звеном.
5.4.2.4. Эксплуатационная надежность и стабильность характеристик. Возможные неисправности
(см. п. 5.4.1.4)
| № | Наименование учебного вопроса |
| 5.1. Назначение и типы усилительных устройств. 5.2. Принцип действия, особенности конструктивного выполнения, алгоритмы функционирования элементов САУ и САР: усилительных устройств. 5.2.1. Дроссельные усилители. 5.2.1.1. Принцип действия, особенности конструктивного выполнения. 5.2.1.2. Алгоритм функционирования. 5.2.1.3. Статические и динамические характеристики. 5.2.1.4. Эксплуатационная надежность и стабильность характеристик. Возможные неисправности. 5.2.2. Электрогидравлические усилители 5.2.2.1. Принцип действия, особенности конструктивного выполнения. 5.2.2.2. Алгоритм функционирования. 5.2.2.3. Статические и динамические характеристики. 5.2.2.4. Эксплуатационная надежность и стабильность характеристик. Возможные неисправности. 5.2.3. Усилители электрических сигналов 5.2.3.1. Принцип действия, особенности конструктивного выполнения. 5.2.3.2. Алгоритм функционирования. 5.2.3.3. Статические и динамические характеристики. 5.2.3.4. Эксплуатационная надежность и стабильность характеристик. Возможные неисправности. 5.3. Назначение и типы исполнительных устройств. 5.4. Принцип действия, особенности конструктивного выполнения, алгоритмы функционирования элементов САУ и САР: исполнительных устройств 5.4.1. Силовые гидроцилиндры. 5.4.1.1. Принцип действия, особенности конструктивного выполнения 5.4.1.2. Алгоритм функционирования. 5.4.1.3. Статические и динамические характеристики 5.4.1.4. Эксплуатационная надежность и стабильность характеристик. Возможные неисправности 5.4.2. Гидропривод. 5.4.2.1. Принцип действия, особенности конструктивного выполнения. 5.4.2.2. Алгоритм функционирования. 5.4.2.3. Статические и динамические характеристики. 5.4.2.4. Эксплуатационная надежность и стабильность характеристик. Возможные неисправности. |

