




Эти погрешности обусловлены неточностью выставки платформы при подготовке к полету в плоскости горизонта и в азимуте.
Погрешность начальной выставки в горизонте α0 приводит к незатухающим колебаниям платформы, описываемым уравнением
где,  - частота Шулера.
- частота Шулера.
Поскольку гироплатформа отклонена от плоскости горизонта на угол α0, ускорения будут измеряться с ошибкой, определяемой (9.7). Учитывая малость угла α0, можно приблизительно считать, что

Погрешность в измерений ускорения (9.13) обусловит ошибки по скорости
или, учитывая, что ω0 2 = g/R,

Интегрируя (9.14), определим значение ошибки в нахождении пройденного расстояния по направлению к оси Ох:

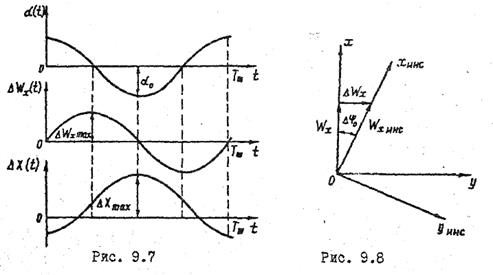
Уравнения (9.13), (9.14) и (9.15) определяют характер изменения погрешностей в определении ускорения, скорости и пройденного пути. Как видно из рис. 9.7, эти погрешности имеют характер незатухающих колебаний и не накапливаются во времени.
Однако если принять R = 6371 км, g = 9,81 м/с, то в соответствии с (9.14) и (9.15) каждая минута ошибки начальной выставки в горизонте приводит к максимальным ошибкам по скорости в координате, пренебрегать которыми нельзя:

Неточная начальная выставка платформы в азимуте (по курсу) приводит к погрешностям в определении пройденного пути. При этом вектор вычисляемой скорости и траектория полета поворачиваются соответственно знаку ошибки курса Δψ (рис. 9.3). Если предполагать Δψ0=const в течение всего полета, то с достаточной для практики точностью можно считать, что

где, ΔY - боковое отклонение от линии заданного пути.
При полете по ортодромий ошибка Δψ0 =10 вызывает погрешность ΔY, равную 1,75% X. Поэтому требуемая точность к начальной выставке в азимуте составляет несколько угловых минут.
Ввод начальной скорости с ошибкой ΔVox для начального условия  дает погрешность в определении скорости
дает погрешность в определении скорости 
и в определении координаты
Эти погрешности носят также колебательный характер, как и погрешности от неточной выставки в горизонте, и со временем не накапливаются.
Из инструментальных погрешностей ИНС наиболее существенными являются погрешности, обусловленные дрейфом ωдрг горизонтирующих гироскопов. Их величина определяется следующими соотношениями:
Вид зависимостей (9.16) представлен на рис. 9.9. Средняя составляющая инструментальной погрешности ΔX(t) возрастает по закону
так, что при  =0,1 град/ч обусловливает накопление ошибки ΔX со скоростью 11,1 км/ч. Поэтому во всех современных ИНС принимают специальные меры для учета и компенсации дрейфа горизонтирующих гироскопов.
=0,1 град/ч обусловливает накопление ошибки ΔX со скоростью 11,1 км/ч. Поэтому во всех современных ИНС принимают специальные меры для учета и компенсации дрейфа горизонтирующих гироскопов.
ИНС с корректируемой в азимуте платформой предназначена для автономного определения на борту аппарата и выдачи потребителям информации о местоположении самолета, составляющих путевой скорости Wx и Wy, углах крена, тангажа и курса.
Измерительные оси х, y, z гироплатформы ориентированы в меридиональной (ортополярной) системе координат, являющейся частным случаем ортодромической системы, основной круг которой совмещен с географическим меридианом точки Мо старта, а начальный - с географическим экватором, как показано на рис. 9.10.
Координата точки М текущего местоположения летательного аппарата определяются условиями широтой δ и долготой μ.
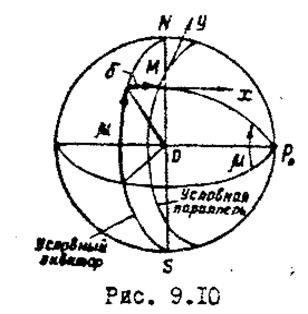 |
Направление осей Ох и Оу, касательных к условным меридиану и параллели соответственно, задается путем выставки датчиков курса в точке М по географическому меридиану.
Ортодромический курс ψОРТ отсчитывается от оси Оу и в точке старта Мо равен истинному курсу.
Основным элементом ИНС данного типа (рис. 9.11) является гироцентраль (ГЦ), представляющая собой невыбиваемую курсовертикаль с двумя трехстепенными гироскопами Г 1 (канал X) и Г 2 (канал У), оси собственного вращения которых взаимно перпендикулярны и горизонтальны. Ось ротора гироскопа Г 1, задающего также и азимутальную ориентацию платформы, направлена по оси Оу.
Невыбиваемость гироцентрали обеспечивается следящей рамой крена, управляемой по сигналам вращающегося трансформатора  , установленного на оси рамы внутреннего крена.
, установленного на оси рамы внутреннего крена.
При воздействии на ГЦ внешних возмущений она отклоняется от первоначального положения на некоторый угол, в результате чего к гироскопам прикладываются внешние возмущающие моменты. Под действием этих моментов гироскопы начнут прецессировать. Углы поворота осей роторов гироскопов Г1 и Г2 в результате прецессионного движения воспринимаются датчиками углов ДУx, ДУy, ДУZ1 или ДУZ2. Каждый датчик управляет в соответствии с электрокинематической схемой ИНС работой одного из двигателей: Мψ, Мν, МγВН, МγВНЕШ, которые реализуют известный принцип силовой гиростабилизации.
Управление положением гироцентрали в пространстве осуществляется а помощью моментных датчиков МДx, МДy и МДz, обеспечивающих прецессию гироскопа в заданном направлении.
Специфика управления состоит в необходимости учета (при формировании моментов коррекции) вращения Земли  и движения летательного аппарата над ее поверхностью с угловой скоростью
и движения летательного аппарата над ее поверхностью с угловой скоростью  .
.
Если за равновесное положение оси Оz принять истинную вертикаль и пренебречь несферичностью Земли, то составляющие полной угловой скорости связанного с платформой навигационного трехгранника x y z, определяются следующим образом:
Составляющие Wx и Wy путевой скорости и координаты μ и δ, необходимые для формирования сигналов коррекции гироскопов, рассчитываются в вычислительно-усилительном блоке. Значения Wx и Wy находятся интегрированием составляющих относительных ускорений  и
и  , определяемых в навигационной системе координат следующими выражениями:
, определяемых в навигационной системе координат следующими выражениями:
где aКХ и aКУ - сигналы составляющих ускорения Кориолиса и центростремительного ускорения из-за движения летательного аппарата.
Таким образом, для получения сигналов  и
и  к показаниям акселерометров необходимо добавить сигналы компенсации. Вторым интегрированием получают координаты μ и δ по формулам
к показаниям акселерометров необходимо добавить сигналы компенсации. Вторым интегрированием получают координаты μ и δ по формулам
Начальные координаты μ0 и δ0 вводятся с пульта выставки следует подчеркнуть, что сигналы μ и δ необходимы только для функционирования каналов ИНС. В полете эта информация экипажем не используется. Навигационная информация, необходимая для самолетовождения, рассчитывается по сигналам Wx, Wy и ψОРТ либо в ЦВМ бортового комплекса, либо в аналоговых вычислителях других навигационных систем, входящих вместе с ИНС в комплекс. При отказе ИНС по скорости она работает как обычная курсовертикаль, выдавая сигналы как углов крена и тангажа, так и ортодромического курса. Эти сигналы снимаются непосредственно с сельсинов-датчиков или синусно-косинусных трансформаторов, закрепленных на осях подвеса гироплатформы.
Вывод: качество решения задач воздушной навигации при использовании инерциальных навигационных систем полностью зависит от начальной выставки системы по горизонту.

