




Классификация методов векторного управления
Начиная с семидесятых годов двадцатого века было предложено множество способов управления моментом. Не все из них нашли широкое применение в промышленности. Поэтому, в данной статье рассматриваются только самые популярные методы управления. Обсуждаемые методы контроля момента представлены для систем управления асинхронными двигателями и синхронными двигателями с постоянными магнитами с синусоидальной обратной ЭДС.
Существующие методы управления моментом могут быть классифицированы различным способом.
Чаще всего методы управления моментом разделяют на следующие группы:
линейные (ПИ, ПИД) регуляторы;
нелинейные (гистерезисные) регуляторы.
Среди векторного управления наиболее широко используются полеориентированное управление(FOC - field oriented control) и прямое управление моментом (DTC - direct torque control).
Линейные регуляторы момента
Линейные регуляторы момента работают вместе с широтно-импульсной модуляцией (ШИМ) напряжения. Регуляторы определяют требуемый вектор напряжения статора усредненный за период дискретизации. Вектор напряжения окончательно синтезируется методом ШИМ, в большинстве случаев используется пространственно векторная модуляция (ПВМ). В отличие от нелинейных схем управления моментом, где сигналы обрабатываются по мгновенным значениям, в линейных схемах контроля момента, линейный регулятор (ПИ) работает с значениями усредненными за период дискретизации. Поэтому частота выборки может быть уменьшена с 40 кГц у нелинейных регуляторов момента до 2-5 кГц в схемах линейных регуляторов момента.
К группе линейных регуляторов относят следующие методы управления моментом:
· полеориентированное управление (ПОУ, англ. field oriented control, FOC);
· прямое управление моментом с пространственно векторной модуляцией напряжения (ПУМ-ПВМ, англ. direct torque control with voltage space vector modulation, DTC-SVM);
· прямое управление моментом с пространственно векторной модуляцией потока (ПУМ-ПВМП, англ. direct torque control with flux vector modulation, DTC-FVM).
Полеориентированное управление
Полеориентированное управление (ПОУ, англ. field oriented control, FOC) - метод регулирования, который управляет бесщеточным электродвигателем переменного тока (СДПМ, АДКР), как машиной постоянного тока с независимым возбуждением, подразумевая, что поле и момент могут контролироваться отдельно.
Полеориентированное управление, предложенное в 1970 году Блашке [ и Хассе основано на аналогии с механически коммутируемым коллекторным двигателем постоянного тока с независимым возбуждением. В этом двигателе разделены обмотки возбуждения и якоря, потокосцепление контролируется током возбуждения индуктора, а момент независимо управляется регулировкой тока якоря. Таким образом, токи потокосцепления и момента электрически и магнитно разделены.
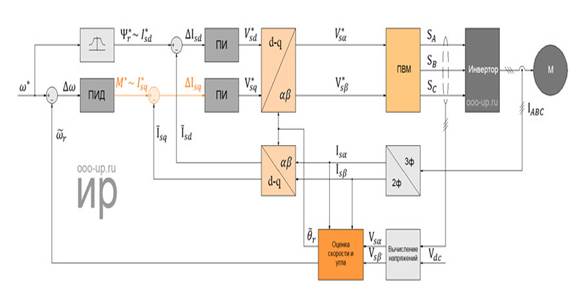
Общая функциональная схема бездатчикового полеориентированного управления1
Примечание: Схема приведена в упрощенном виде. Подробная схема бездатчикового полеориентированного управления СДПМ с ротором с явно выраженными полюсами.
С другой стороны бесщеточные электродвигатели переменного тока (АДКР, СДПМ) чаще всего имеют трехфазную обмотку статора, и вектор тока статора Is используется для контроля и потокосцепления и момента. Таким образом, ток возбуждения и ток якоря объединены в вектор тока статора и не могут контролироваться раздельно. Разъединение может быть достигнуто математически - разложением мгновенного значения вектора тока статора Is на две компоненты: продольную составляющую тока статора Isd (создающую поле) и поперечную составляющую тока статора Isq (создающую момент) во вращающейся dq системе координат ориентированной по полю ротора (R-FOC – rotor flux-oriented control) - рисунок выше. Таким образом, управление бесщеточным двигателем переменного тока становится идентичным управлению КДПТ с независимым возбуждением и может быть осуществлено используя инвертер ШИМ с линейным ПИ регулятором и пространственно-векторной модуляцией напряжения.
В полеориентированном управлении момент и поле контролируются косвенно посредством управления составляющими вектора тока статора.
Мгновенные значения токов статора преобразовываются к dq вращающейся системе координат с помощью преобразования Парка αβ/dq, для выполнения которого также требуется информации о положении ротора. Поле контролируется через продольную составляющую тока Isd, в то время как момент контролируется через поперечную составляющую тока Isq. Обратное преобразование Парка (dq/αβ), математический модуль преобразования координат, позволяет вычислить опорные составляющие вектора напряжения Vsα* и Vsβ*.
Для определения положения ротора используется либо датчик положения ротора установленный в электродвигателе либо реализованный в системе управления бездатчиковый алгоритм управления, который вычисляет информацию о положении ротора в режиме реального времени на основании тех данных, которые имеются в системе управления.

