




Кінематичний і динамічний аналіз механізму
Завдання на розрахунково-графічну роботу
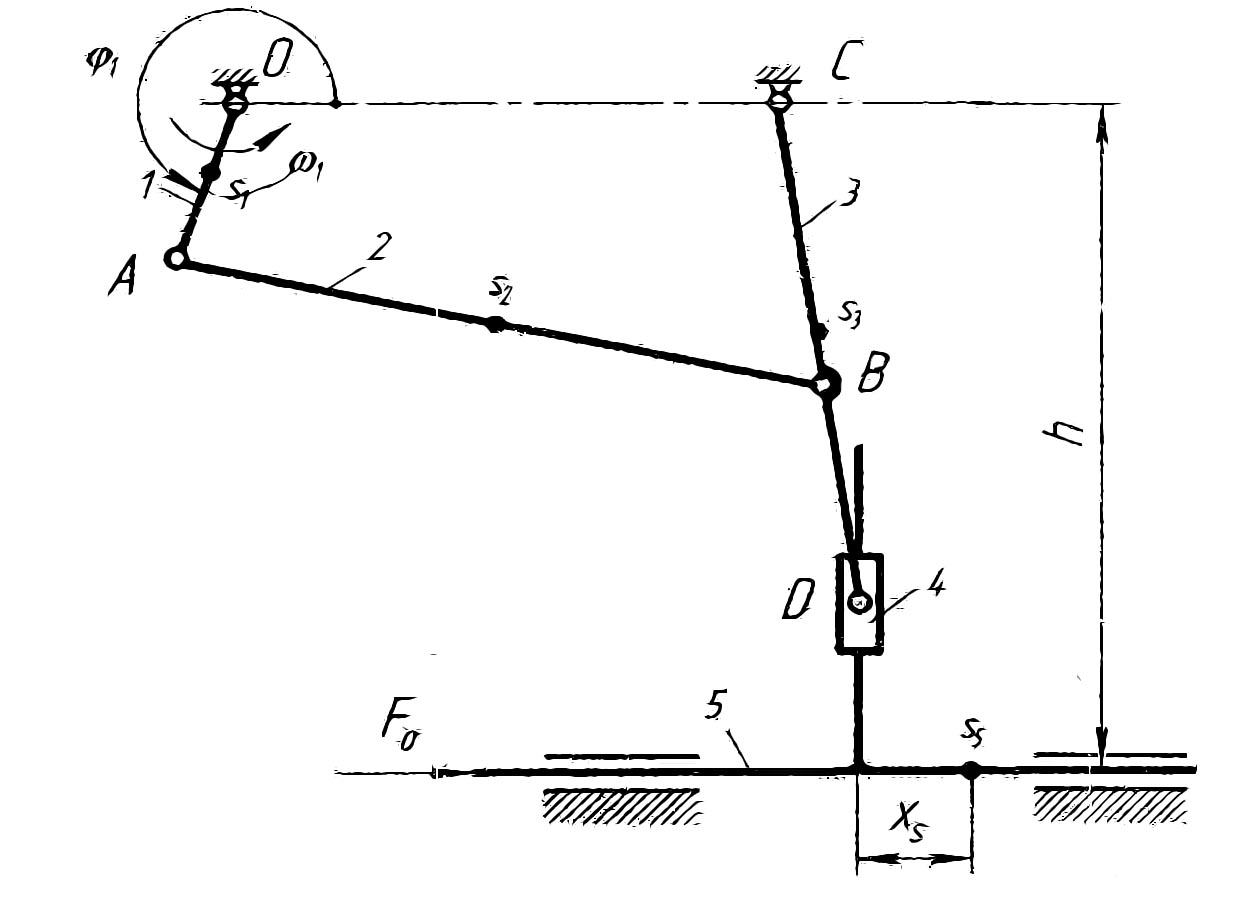
Рисунок 1.1 – Структурна схема виконавчого
важільного механізму
| № вар | lOA | lAB | lСВ | lCD | lОС | h | XS | w1 | j1 | F0 | |
| м | c-1 | град | кН | ||||||||
| 0,127 | 0,574 | 0,44 | 0.61 | 0,39 | 0.72 | 0.42 | 0.45 |
Короткий опис складових механізму, який проектується
Заданий виконавчий важільний механізм складається з кривошипа 1, шатуна 2, коромисла 3, повзуна 4 і куліси 5. Кривошип 1 і коромисло 3 здійснюють обертальний рух відносно нерухомих центрів відповідно О і С. Шатун 2 здійснює плоско-паралельний рух. Повзун 5 здійснює зворотно-поступальний рух паралельно напрямніх куліси. А куласі 5 здійснює зворотньо-поступальні рухи в горизонталі. Даний механізм служить для перетворення обертового руху кривошипа 1 в зворотно-поступальний рух куліси 5.
| Змн. |
| Арк. |
| № докум. |
| Підпис |
| Дата |
| Арк. |
| ПС-10-1 |
Структурний аналіз механізму
Виконаємо структурний аналіз механізму. Число степенів вільності механізму визначаємо за формулою Чебишева
W = 3n – 2p5– p4= 3·5 – 2·7 – 0 =1,
де n=5 – кількість рухомих ланок; p5=7 – кількість кінематичних пар 5 класу; p4=0 – кількість кінематичних пар 4 класу;
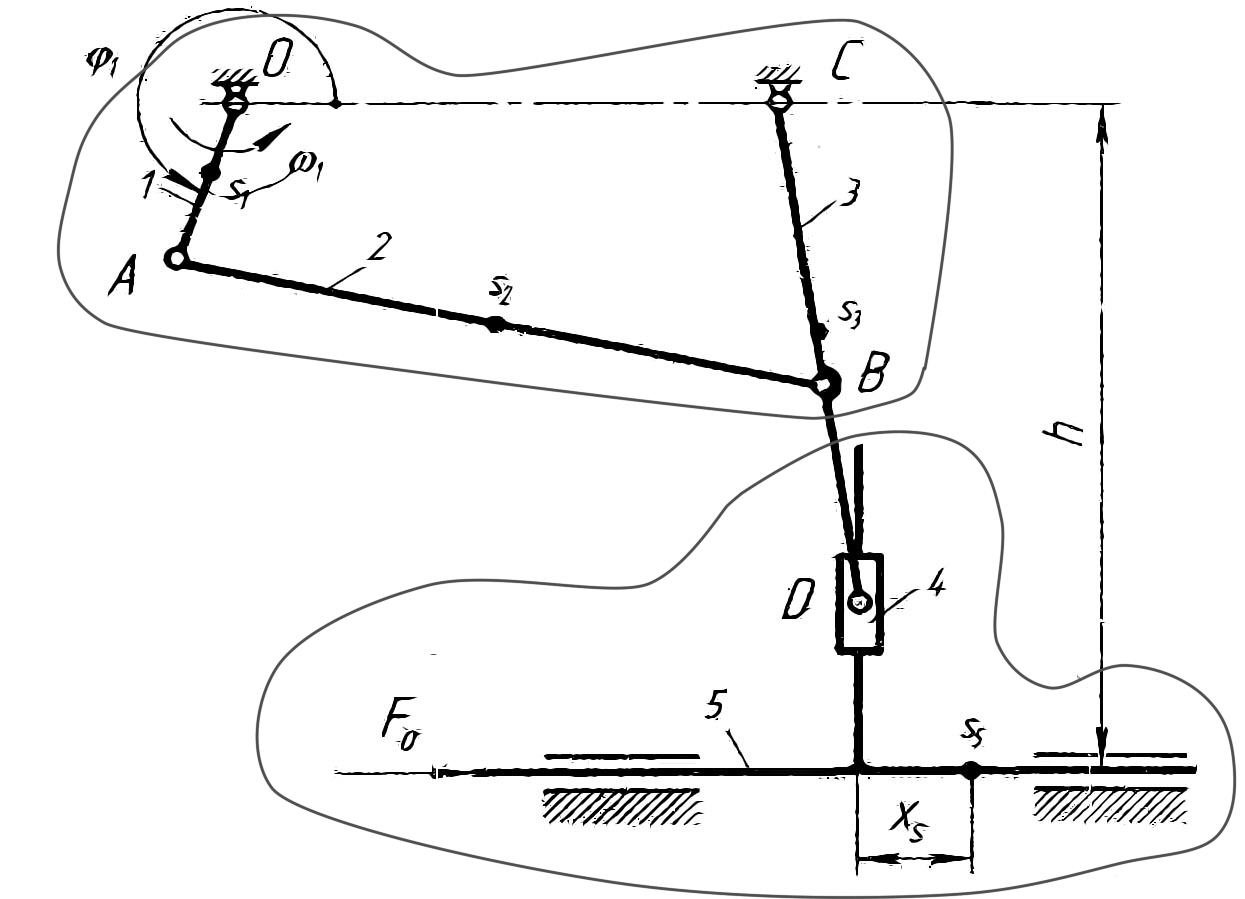
Рисунок 1.2 – Структурний аналіз важільного механізму
Оскільки W = 1, то це означає, що механізм має одну вхідну ланку – кривошип 1. Далі розбиваємо механізм на структурні групи. Першу структурну групу в порядку від’єднання утворюють ланки 4 і 5, другу ланки – 2 і 3. Обидві структурні групи відносяться до другого класу за класифікацією І. Артоболевського. Таким чином механізм складається із нерухомого стояка 0, вхідної ланки і двох структурних груп другого класу. А тому цей механізм відноситься до другого класу за класифікацією І.Артоболевського.
| Змн. |
| Арк. |
| № докум. |
| Підпис |
| Дата |
| Арк. |
| ПС-10-1 |
Побудова 12-ти положень механізму
Побудову 12-ти положень механізму виконуємо у такій послідовності:
- вибираємо масштабний коефіцієнт
- вибираємо положенняположення точки О і відкладаємо коло радіусом
- від положення точки О відкладаємо вертикально вниз відстань  , отримуємо горизонтальну напрямну куліси
, отримуємо горизонтальну напрямну куліси
- від положення точки О відкладаємо відстань 
отримуємо точку С.
- від положення точки С відкладаємо два радіуси


- знаходимо положення точки B. З'єднуємо АB=0,57/0,00508=112,2 мм кола радіусами R1 і R2, при положенні т. А зправа від т.О. З'днуємо В і С ВС=R2.
- знаходимо положення точки D. На відрізку СВ продовжуємо пряму, відстанню СD=R3=120.1 мм від т.С.
- з т.D проводимо вертикаль до напрямної, отримуємо миттєве положення куліси 5
- з’єднуючи відповідні положення точок А з B і C з В і D, будуємо кінематичну схему механізму для 12-ти положень вхідної ланки.
Визначення швидкостей ланок для 12-ти положень механізму
Контрольне положення механізму №0(12)’. Швидкості ланок механізму визначаємо методом планів. Будуємо план швидкостей для контрольного положення механізму
Ланка 1 здійснює обертальний рух, тому
 ;
;
Вибираємо масштабний коефіцієнт плану швидкостей  . З полюса плану швидкостей рv відкладаємо перпендикулярно до ОА відрізок
. З полюса плану швидкостей рv відкладаємо перпендикулярно до ОА відрізок  . Швидкість точки В, яка належить кулісі 3, рівна швидкості точки B, яка належить шатуну 2,
. Швидкість точки В, яка належить кулісі 3, рівна швидкості точки B, яка належить шатуну 2,  . Невідому швидкість точки B, яка належить кулісі 3, знаходимо із системи векторних рівнянь
. Невідому швидкість точки B, яка належить кулісі 3, знаходимо із системи векторних рівнянь
| Змн. |
| Арк. |
| № докум. |
| Підпис |
| Дата |
| Арк. |
| ПС-10-1 |
Тут 
Розв'язуємо дану систему графічним методом. З точки а, кінця вектора  , проводимо пряму перпендикулярну ланці AB, a з точки C, яка співпадає з полюсом рv проводимо пряму перпендикулярну до ланки CB і на перетині одержуємо точку b. Вектор
, проводимо пряму перпендикулярну ланці AB, a з точки C, яка співпадає з полюсом рv проводимо пряму перпендикулярну до ланки CB і на перетині одержуємо точку b. Вектор  зображує на плані швидкостей швидкість
зображує на плані швидкостей швидкість  . Величина цієї швидкості
. Величина цієї швидкості  м/с.
м/с.
Знаходимо швидкість точки D. Швидкість т.D і т.В звязані між собою геометричним співвідношенням: CD/CВ=1,64. Тому і швидкості будуть пропорціні:
 м/с
м/с
Швидкість т.D знаходиться за формулою: 
 ;
; 

На перетині отримаємо точку d.  = Pvd*
= Pvd*  =86*0.00508=0.44 м\с
=86*0.00508=0.44 м\с
Заміряємо відповідні довжини векторів:
Pva=35мм ab=72мм Pvb=2мм сd=1мм Pvс=1,6мм
Знаходимо швидкості ланок:
 м/с;
м/с;
 м/с;
м/с;
Кутові швидкості ланок
 .
. 
Для решти 11 – ти положень механізму побудову планів швидкостей виконуємо аналогічно. Результати розрахунків заносимо у табл.1.1.
Таблиця 1.1 – Результати побудови планів швидкостей
| № пол. | Кінематичні параметри | |||||
 ,
м/с ,
м/с
|  ,
м/с ,
м/с
|  ,
м/с ,
м/с
|  ,
м/с ,
м/с
|  ,
рад/с ,
рад/с
|  ,
рад/с ,
рад/с
| |
| 1,397 | 0,277 | 0,4495 | 0,44 | 0,63 | ||
| 1,397 | 0,3415 | 0,5015 | 0,4945 | 0,78 | ||
| 1,397 | 0,331 | 0,34 | 0,3325 | 0,75 | ||
| 1,397 | 0,0915 | 0,12 | 0,111 | 0,21 | ||
| 1,397 | ||||||
| 1,397 | -0,0825 | -0,1185 | 0,1055 | 0,19 | ||
| 1,397 | -0,138 | -0,218 | 0,2045 | 0,31 | ||
| 1,397 | -0,185 | -0,271 | 0,2575 | 0,42 | ||
| 1,397 | -0,2195 | -0,3005 | 0,3005 | 0,5 | ||
| 1,397 | -0,21 | -0,304 | 0,295 | 0,55 | ||
| 1,397 | -0,135 | -0,1985 | 0,2 | 0,31 | ||
| 1,397 | 0,0315 | 0,05 | 0,042 | 0,07024 |
| Змн. |
| Арк. |
| № докум. |
| Підпис |
| Дата |
| Арк. |
| ПС-10-1 |
| Змн. |
| Арк. |
| № докум. |
| Підпис |
| Дата |
| Арк. |
| Змн. |
| Арк. |
| № докум. |
| Підпис |
| Дата |
| Арк. |
| ПС-10-1 |
Визначаємо числові значення зведеного моменту сил опору за формулою
 .
.
Оскільки, сили ваги значно менші за величиною від сили опору F то першими нехтуємо. Тоді
 .
.
Результати обчислень заносимо у табл.1.3.
Таблиця 1.3 –Результати енергетичного розрахунку механізму
| № положення | VD5 (м/с) |  ,
мм ,
мм
| F, (Н) |  ,
(Н·м) ,
(Н·м)
|  ,
мм ,
мм
|  ,
Дж ,
Дж
|  ,
мм ,
мм
|
| 0,44 | -18 | -51,4 | |||||
| 0,4945 | 49,5 | -20,22 | -57,8 | -10,006 | -20 | ||
| 0,3325 | 33,2 | -13,6 | -38,9 | -18,86 | -37,7 | ||
| 0,111 | 11,1 | -4,54 | -13 | -23,61 | -47,2 | ||
| -24,78 | -49,4 | ||||||
| 0,1055 | -10,5 | -24,78 | -49,4 | ||||
| 0,2045 | -20,5 | -24,78 | -49,4 | ||||
| 0,2575 | -25,8 | -24,78 | -49,4 | ||||
| 0,3005 | -30 | -24,78 | -49,4 | ||||
| 0,295 | -29,5 | -24,78 | -49,4 | ||||
| 0,2 | -20 | -24,78 | -49,4 | ||||
| 0,042 | 4,2 | -1,7178 | -4,9 | -25,23 | -50,5 | ||
| 0,44 | -18 | -51,4 | -30,39 | -60,7 |
 .
.  =0.01
=0.01
| Змн. |
| Арк. |
| № докум. |
| Підпис |
| Дата |
| Арк. |
Для побудови графіка  задаємось масшабним коефіцієнтом
задаємось масшабним коефіцієнтом  Нм/мм. Обчислюємо ординати графіка
Нм/мм. Обчислюємо ординати графіка
 .
.
Значення ординат заносимо у табл.1.2. Через точки 0,1,2...12 осі абсцис проводимо вертикальні лінії і відкладаємо на них знайдені значення ординат.
Кінці проведених ординат з’єднуємо плавною кривою і отримаємо графік функції  (рис. 1.3)
(рис. 1.3)

