




Для построения механической характеристики электродвигателя  необходимо определить ее характерные точки. В начале определяются синхронная ω 0 и номинальная ω ном угловая скорость электродвигателя по следующим выражениям:
необходимо определить ее характерные точки. В начале определяются синхронная ω 0 и номинальная ω ном угловая скорость электродвигателя по следующим выражениям:

 ,
,
где n 0 и n ном – синхронная и номинальная частота вращения двигателя, об/мин.
Затем определяют номинальную величину скольжения:

Для определения критического скольжения используют формулу Клосса:
 ,
,
где 
В некоторых случаях при построении механической характеристики используют приближенные формулы. Упрощение может быть получено, если пренебречь активным сопротивлением статора, т.е. считать R 1 = 0. В этом случае выражение принимает следующий вид:
Если вместо текущих значений момента и скольжения подставить их номинальные значения М ном и s ном и обозначить кратность максимального момента М кр /М ном через l м, то критический момент может быть найден по следующему выражению:
Угловая скорость двигателя при критическом моменте находится по следующему выражению:
Далее с учетом пускового момента двигателя М п, определяющегося по справочным данным (при s = 0), производят построение механической характеристики электродвигателя.
Как указывалось ранее, частота вращения асинхронного двигателя может быть определена по следующему выражению:

Наиболее перспективным и широко используемым в настоящее время способом регулирования скорости АД является частотное регулирование. Принцип его заключается в том, что, изменяя частоту f 1 питающего АД напряжения, можно изменять его синхронную скорость w 0, получая тем самым различные искусственные характеристики. Этот способ обеспечивает плавное регулирование в широком диапазоне, получаемые характеристики обладают высокой жесткостью. Частотный способ к тому же отличается и еще одним весьма важным свойством при регулировании скорости АД не происходит увеличения его скольжения, поэтому при этом способе регулирования потери скольжения оказываются небольшими, в связи с чем частотный способ является наиболее экономичным.
Для лучшего использования АД и получения высоких энергетических показателей его работы – коэффициентов мощности, полезного действия, перегрузочной способности следует также учесть, что с изменением частоты напряжения питания изменяется и поток двигателя Ф 1:

Поэтому в большинстве случаев одновременно с изменением частоты напряжения питания необходимо регулировать и его амплитуду. Регулирование напряжения при уменьшении частоты ниже номинальной частоты необходимо потому, что из-за уменьшения индуктивного сопротивления обмоток двигателя ток намагничивания будет возрастать, что приведет к насыщению магнитопровода двигателя и его перегреву. Регулирование напряжения следует проводить таким образом, чтобы скольжение двигателя было минимальным.
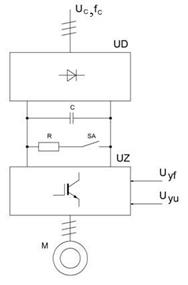
Для реализации способа частотного регулирования асинхронный короткозамкнутый двигатель включают в сеть с параметрами U c = const и f с = const через преобразователь частоты UZ. Современные серийно выпускаемые преобразователи частоты, как правило, выполнены на базе транзисторного инвертора, а в качестве силовых ключей используются биполярные транзисторы с изолированным затвором (IGBT).
|
| Рис.7. Структурная схема |
Рассмотрим наиболее распространенные законы управления, применяемые при частотном регулировании.
Закон Костенко — характеристики асинхронного двигателя при частотах питающего напряжения, отличных от номинальной, зависят от соотношения между напряжением сети U 1 и частотой f 1. При выборе соотношения между частотой и напряжением, подводимым к статору АД, часто исходят на условия сохранения его перегрузочной способности, которая определяется отношением критического момента двигателя М к к моменту нагрузки М с,

Как известно из теории электрических машин максимальный момент электродвигателя описывается следующим выражением:

Если пренебречь активным сопротивлением статора и учесть, что xк ~ f 1 и w0 ~ f 1, то выражение для перегрузочной способности можно записать как:
где A – постоянная, не зависящая от f 1.
Из последнего выражения следует, что для любых двух значений частоты f 1 i и f 1к должно соблюдаться следующее соотношение:

где M c i , M cк – моменты нагрузки при скоростях АД, соответствующих частотам f 1 i и f 1к.
Отсюда следует основной закон изменения напряжения при частотном способе регулирования скорости АД:

С помощью последнего выражения могут быть получены частные законы изменения напряжения и частоты при различных зависимостях момента нагрузки М с от скорости. При постоянном моменте нагрузки М с = const уравнение принимает вид:

т.е. напряжение на статоре должно изменяться пропорционально его частоте.
Для вентиляторного характера момента нагрузки соотношение уравнение имеет вид

а при моменте нагрузки, обратно пропорциональном скорости, соотношение запишется в виде

Важно отметить, что приведенные выше выражения получены при пренебрежении активным сопротивлением статора. Это допущение мало сказывается при большой (близкой или выше номинальной) частоте, в то время как при малых частотах оно заметно отражается на характеристиках электропривода, что приводит к снижению критического момента АД. Причина этого заключается в уменьшении магнитного потока АД при низких частотах вследствие влияния активного сопротивления статора, вызывающего из-за падения напряжения на R 1 уменьшение ЭДС АД. Для компенсации этого влияния следует с уменьшением частоты снижать напряжение в меньшей степени. В этом случае используют закон IR – компенсации.
Закон IR – компенсации.
Регулирование скорости двигателя при сохранении постоянства максимального момента двигателя должно осуществляться путем уменьшения напряжения в меньшей степени, чем частоты, тем самым компенсируя падение напряжения на активном сопротивлении статора:
 ,
,
где  – относительная частота напряжения питания,
– относительная частота напряжения питания,
 – относительная величина напряжения.
– относительная величина напряжения.
Следует иметь в виду, что величина IR зависит от  , которая для двигателей мощностью более 100 кВт незначительна, и ею, как правило, можно пренебрегать; для двигателей мощностью до 15 кВт учет обязателен.
, которая для двигателей мощностью более 100 кВт незначительна, и ею, как правило, можно пренебрегать; для двигателей мощностью до 15 кВт учет обязателен.
Номинальный момент двигателя:

Номинальное скольжение двигателя:

Формула для расчета механических характеристик при переменных значении и частоте напряжения питания:
 |
где  – регулируемые скорость поля и скольжения;
– регулируемые скорость поля и скольжения;
 – номинальные сопротивления короткого замыкания и контура намагничивания;
– номинальные сопротивления короткого замыкания и контура намагничивания;
 – сопротивление статора и приведенное сопротивление ротора.
– сопротивление статора и приведенное сопротивление ротора.
Максимальный момент двигателя:
Критическое скольжение:
 ,
,
где знак «+» соответствует двигательному режиму, знак «–» – режиму рекуперативного торможения.
ЧАСТЬ 2
Исходные данные
Тип исполнительного механизма выбирается по сумме двух последних цифр зачетной книжки. Данные для расчетов берутся из таблиц по последней и предпоследней цифре зачетной книжки.
0 – 6) электропривод насоса:
| Исходные данные | Номер соответствует последней цифре зачетной книжки | ||||||||||
| Параметр | Размерность | ||||||||||
| Q факт | м3/ч | ||||||||||
| Н стат | м | ||||||||||
| Н н | |||||||||||
| k | 0,012 | 0,016 | 0,006 | 0,008 | 0,006 | 0,006 | 0,008 | 0,002 | 0,013 | 0,002 | |
| Перекачиваемая жидкость | Вода пресная | Вода морская | Масло | Нефть | Бензин |
Выбор электродвигателя
На основанииполученных исходных данных строятся характеристики трубопровода и насоса по следующим выражениям:
 - для характеристики трубопровода;
- для характеристики трубопровода;
 - для характеристики насоса,
- для характеристики насоса,
где  и
и  - статическая высота напора, м;
- статическая высота напора, м;
Q – производительность насоса, м3/ч;
Н – полный напор жидкости, м.
Задаваясь различными значениями Q, строятся характеристики трубопровода и насоса. Место пересечения характеристик позволяет определить фактическую подачу насоса Q факт и номинальный напор жидкости  .
.
Мощность электродвигателя, необходимая для вращения насоса определяется следующим выражением:
 ,
,
где  - ускорение свободного падения (
- ускорение свободного падения ( );
);
 - плотность перекачиваемой жидкости, кг/м3;
- плотность перекачиваемой жидкости, кг/м3;
 - коэффициент, учитывающий потери через неплотности
- коэффициент, учитывающий потери через неплотности
( ;
;
 - КПД насоса (
- КПД насоса ( ).
).
Из каталога выбирается двигатель ближайшей большей мощности и скорости, имеющий конструктивное исполнение, соответствующее условиям работы данной рабочей машины.
7 – 12) электропривод грузоподъемного механизма:
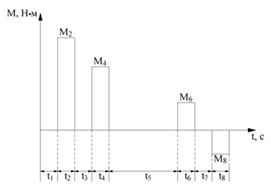
|
| Рис. 8. Диаграмма работы грузоподъемного механизма |
| Исходные данные | Номер соответствует первой цифре зачетной книжки | ||||||||||
| Параметр | Размерность | ||||||||||
| ω уст | рад/с | ||||||||||
| M 2 | Н·м | ||||||||||
| M 4 | |||||||||||
| М 6 | |||||||||||
| М 8, | |||||||||||
| Номер соответствует второй цифре зачетной книжки | |||||||||||
| Параметр | Размерность | ||||||||||
| t 1 | с | ||||||||||
| t 2 | |||||||||||
| t 3 | |||||||||||
| t4 | |||||||||||
| t 5 | |||||||||||
| t 6 | |||||||||||
| t 7 | |||||||||||
| t 8 |
Выбор электродвигателя
1) На основаниинагрузочной диаграммы работыэлектропривода грузоподъемного механизма определяется эквивалентный момент по следующему выражению:
 ,
,
где  - момент и длительность i-гo участка нагрузочной диаграммы.
- момент и длительность i-гo участка нагрузочной диаграммы.
2) Определяется продолжительность включения электродвигателя расчетная ПВ р, %:

3) Определяется момент электродвигателя:
 ,
,
где ПВ к — продолжительность включения электродвигателя каталожная, %.
4) Определяется номинальная скорость двигателя.

5) Определяется номинальная расчетная мощность электродвигателя:
 ,
,
где  - коэффициент запаса, учитывающий динамические режимы
- коэффициент запаса, учитывающий динамические режимы
электродвигателя, когда он работает с повышенными моментами.
Из каталога выбирается двигатель ближайшей большей мощности и скорости, имеющий конструктивное исполнение, соответствующее условиям работы данной рабочей машины.
13 – 18) электропривод механизма перемещения:

| ||||||||||||
| Рис. 9. Диаграмма и тахограмма работы механизма перемещения | ||||||||||||
| Исходные данные | Номер соответствует первой цифре зачетной книжки | |||||||||||
| Параметр | Размерность | |||||||||||
| M 2 | Н·м | |||||||||||
| М 3 | ||||||||||||
| М 4 | ||||||||||||
| М 6 | ||||||||||||
| M 7 | ||||||||||||
| М 8 | ||||||||||||
| Номер соответствует второй цифре зачетной книжки | ||||||||||||
| Параметр | Размерность | |||||||||||
| t 1 | с | |||||||||||
| t 2 | ||||||||||||
| t 3 | ||||||||||||
| t 4 | ||||||||||||
| t 5 | ||||||||||||
| t 6 | ||||||||||||
| t 7 | ||||||||||||
| t 8 | ||||||||||||
| ω уст1 | рад/с | |||||||||||
| ω уст2 |
Выбор электродвигателя
1) На основаниинагрузочной диаграммы работыэлектропривода грузоподъемного механизма определяется эквивалентный момент по следующему выражению:
где  - момент и длительность i-гo участка нагрузочной диаграммы.
- момент и длительность i-гo участка нагрузочной диаграммы.
2) Определяется продолжительность включения электродвигателя расчетная ПВ р, %:
3) Определяется момент электродвигателя:
,
где ПВ к — продолжительность включения электродвигателя каталожная, %.
4) Определяется номинальная скорость двигателя.
5) Определяется номинальная расчетная мощность электродвигателя:
,
где - коэффициент запаса, учитывающий динамические режимы электродвигателя, когда он работает с повышенными моментами.

