




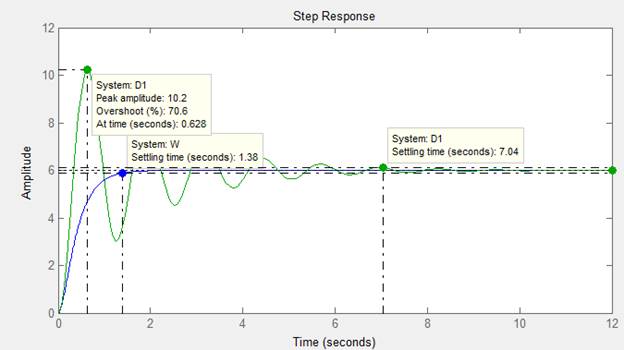
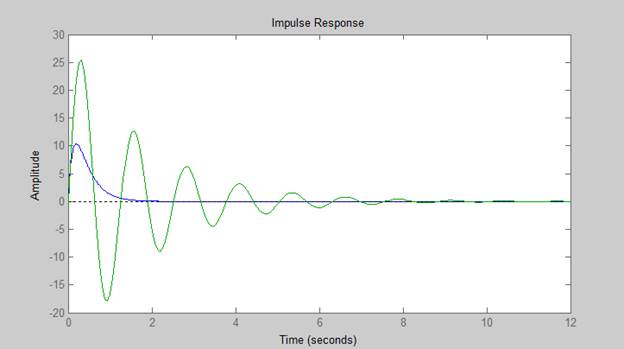
При 10% исходного z
время переходного процесса 0.628 c
перерегулирование = 70,6%
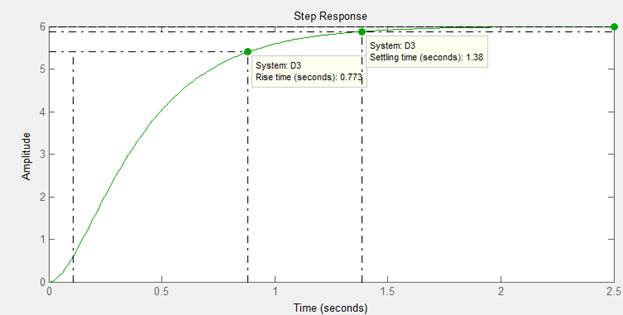
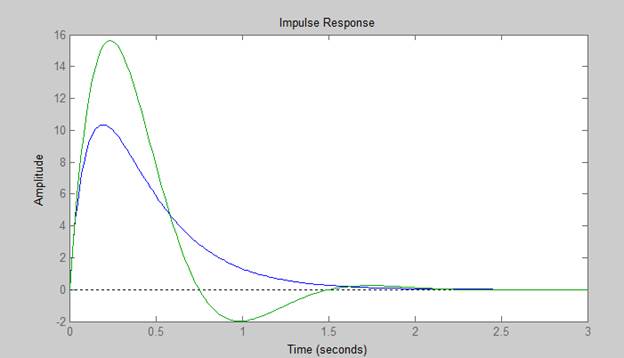
При 50% исходного z
время переходного процесса 0.754 c
перерегулирование = 12,6%

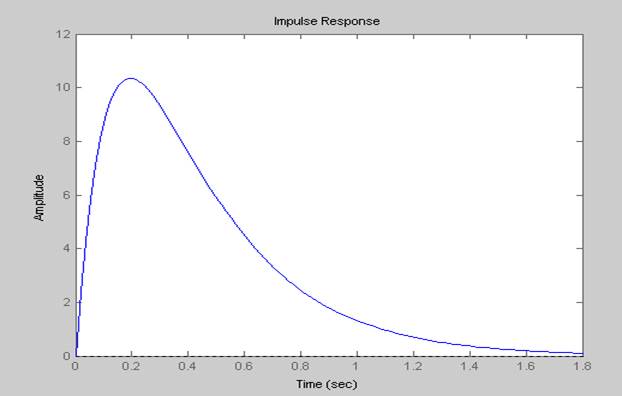
При 100% исходного z
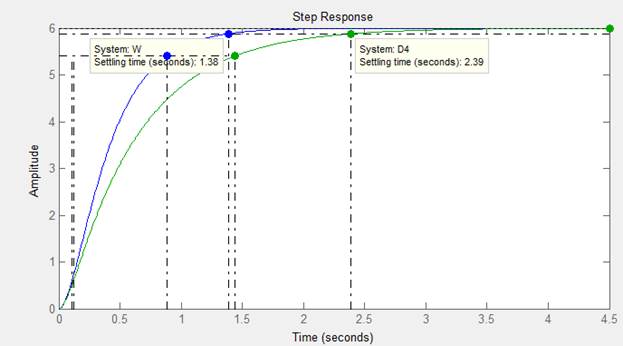
время переходного процесса 1.38 c
перерегулирование = 0%
При 150% исходного z
время переходного процесса 2.39 c
перерегулирование = 0%
При 200% исходного z
время переходного процесса 3.3 c
перерегулирование = 0%

При 1000% исходного z
время переходного процесса 17.2 c
перерегулирование = 0%
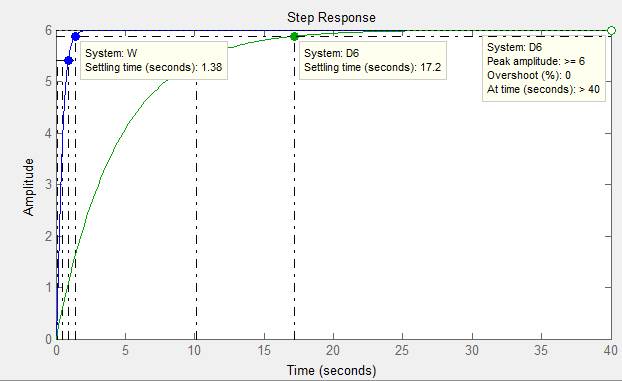
Видно, что при увеличении значение исходного (z) то время переходный процесс увеличивается и перерегулирование уменьшается.
2.5. Построить весовую функцию звена:
– с использованием Simulink (без использования Control System Toolbox);
– с использованием Control System Toolbox (без использования Simulink).
>> impulse(W)
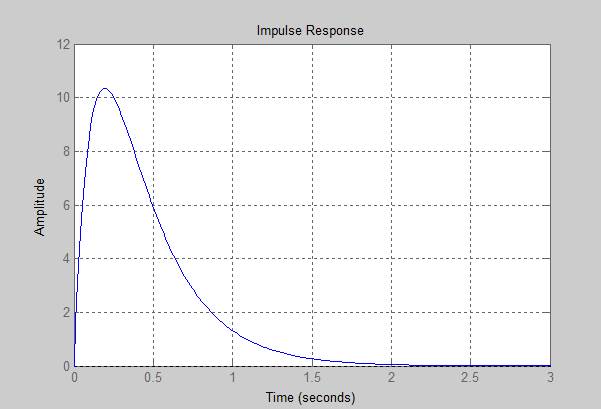
2.6. Исследовать влияние заданного параметра (K, T или z) на вид весовой функции, рассмотреть следующие значения параметра: 10% от исходного, 50% от исходного, 100% от исходного, 150% от исходного, 200% от исходного, 1000% от исходного.
>> W=tf([6],[0.04 0.44 1]);
>> D1=tf([6],[0.04 0.044 1]);
>> impulse(W,D1)
>> D2=tf([6],[0.04 0.22 1]);
>> impulse(W,D2)
>> D3=tf([6],[0.04 0.44 1]);
>> impulse(W,D3)
>> D4=tf([6],[0.04 0.66 1]);
>> impulse(W,D4)

>> D5=tf([6],[0.04 0.88 1]);
>> impulse(W,D5)

>> D6=tf([6],[0.04 4.4 1]);
>> impulse(W,D6)

Моделирование частотных характеристик звена
Построить частотные характеристики (АЧХ и ФЧХ)
– с использованием Control System Toolbox.
>> num=[6]
num =
>> den=[0.04 0.44 1]
den =
0.0400 0.4400 1.0000
>> sys=tf(num,den)
Transfer function:
---------------------
0.04 s^2 + 0.44 s + 1
>> freqs(num,den)
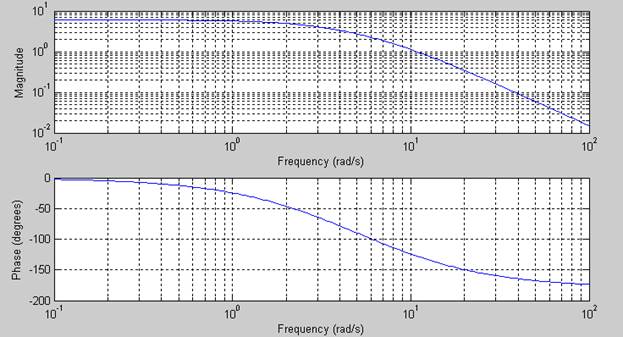
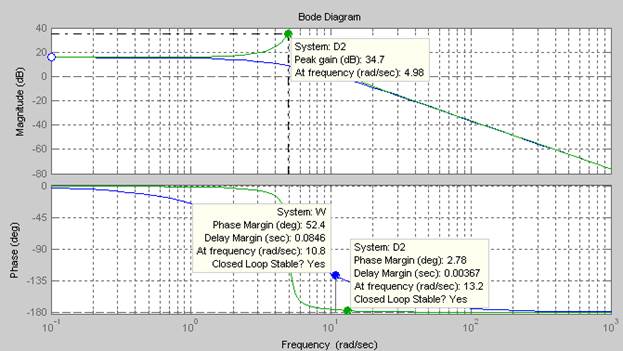
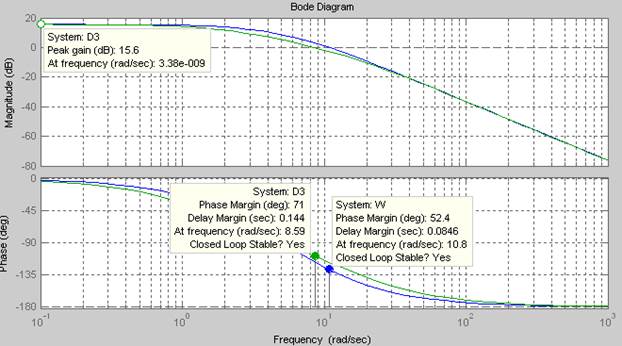
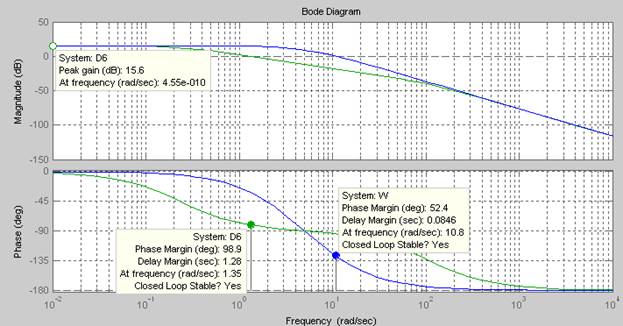
3.2. Исследовать влияние заданного параметра (K, T или z) на вид частотных характеристик, рассмотреть следующие значения параметра: 10% от исходного, 50% от исходного, 100% от исходного, 150% от исходного, 200% от исходного, 1000% от исходного.
>> ltiview(W,D1)

ltiview(W,D2)
>> ltiview(W,D3)
>> ltiview(W,D4)

>> ltiview(W,D5)

>> ltiview(W,D6)
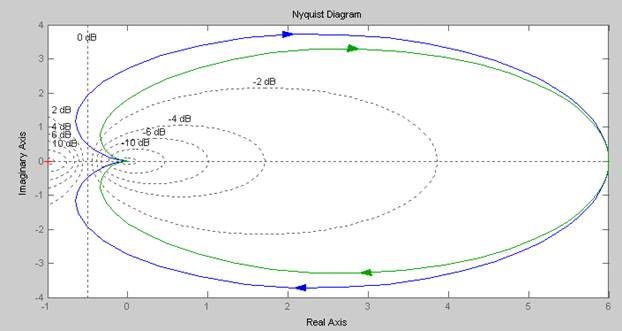
Построить АФЧХ
– с использованием Control System Toolbox.
3.4. Исследовать влияние заданного параметра (K, T или z) на вид АФЧХ, рассмотреть следующие значения параметра: 10% от исходного, 50% от исходного, 100% от исходного, 150% от исходного, 200% от исходного, 1000% от исходного.
>>ltiview(W,D1)

>>ltiview(W,D2)

>>ltiview(W,D3)
>>ltiview(W,D4)

>>ltiview(W,D5)

>>ltiview(W,D6)

Моделирование замкнутой системы с ООС
Построить переходную функцию замкнутой системы с ООС, определить показатели качества, выяснить, как влияет замыкание системы на показатели качества.