




Задача 1.1
1.Номинальный ток Iн= Рн/ (Uн  н);
н);
2. Номинальное сопротивление ЭД Rн = Uн/Iн;
3. Сопротивление якоря Rя =0.5 Rн(1- н );
4. Падение напряжения в цепи якоря  Uян = Uн- Eн= IнRя;
Uян = Uн- Eн= IнRя;
5.Номинальная эдс якорной обмотки Eн= Сн  н = Uн - IнRя= Uн - Uян ;
н = Uн - IнRя= Uн - Uян ;
6. Номинальная скорость якоря  н =
н =  nн /30; н [рад/с]= nн [об/мин]/30[мин/с];
nн /30; н [рад/с]= nн [об/мин]/30[мин/с];
7. Номинальный вращающий момент Мн=Рн/ н ;
8. Потребляемая номинальная электрическая мощность Рэ.н=Рн/ н;
9. Полные номинальные потери в ЭД  Рн=Рн (1- н)/ н;
Рн=Рн (1- н)/ н;
10.Скорость идеального холостого хода 0=Uя / Сн= Uя н/Ен;
11.Коэффициент пропорциональности (потокосцепление) Сн= Ен/ н;
12.Электромагнитный номинальный момент Мэн=Сн Iн;
13.Относительная номинальная скорость якоря *н= н / 0 ;
14. Перепад скорости  = н / 0=( 0- н)/ 0;
= н / 0=( 0- н)/ 0;
15. Жесткость естественной механической характеристики
 =(М*0-М*н )/( *0- *н); М*0=0;М*н=1; *0=1;
=(М*0-М*н )/( *0- *н); М*0=0;М*н=1; *0=1;
16. Момент холостого хода Мхх= Мэн- Мн;
17.Скорость реального холостого хода  хх=Uя / Сн -Мхх Rя/Сн2;
хх=Uя / Сн -Мхх Rя/Сн2;
По полученным данным строим механическую характеристику МПТ НВ.
18.Добавочный резистор в режиме пуска Rд.п.т = Uс/Iп - Rя
19. Iп =2 Iн
20. Добавочный резистор в режиме рекуперативного торможения
21. Rд.р.т = (Ея-Uс )/Iт - Rя
22. Iд.р.тп =2 Iн
23. Добавочный резистор в режиме динамического торможения
Rд.д.т = Ея/Iт - Rя
24.Добавочный резистор в режиме торможения противовключением
Rд.т.п = (Ея+Uс )/Iт - Rя
25. Iт=2 Iн
1.2. Основные величины, характеризующие работу ДПТ НВ. Расчет и построение механической характеристики по каталожным данным
Задача 1.1. Для ДПТ НВ, используя следующие его паспортные (номинальные) данные: Рн = 2,5 кВт; Uн = 110 В; nн = 1000 мин-1;
η= 72 %, определить величины, характеризующие его работу в номинальном режиме, и построить естественную характеристику.
Решение.
Рассматриваемые величины определяются из формул, приведенных в п. 1.1.
1.Номинальный ток Iн= Рн/ (Uн н) = 2500/ (110 •0.72)= 31,6А;
2. Номинальное сопротивление двигателя Rн = Uн/Iн=110/31,6А =3,48 Ом.
3. Сопротивление якоря
Rя =0.5 Rн(1- н )= = 0,5 • 3,48(1 - 0,72) = 0,487 Ом.
4. Падение напряжения в цепи якоря
Uян = Uн- Eн= IнRя=31,6 •0,487= 15,4В.
5.Номинальная эдс якорной обмотки
Eн= Сн н = Uн - IнRя= Uн - Uян = 110 - 15,4 = 94,6 В.
6. Номинальная скорость якоря
н = nн /30; н [рад/с]= nн [об/мин]/30[мин/с]=0,105.1000=105 рад/с.
7. Номинальный вращающий момент
Мн=Рн/ н = 2.5•103 /105=23,8 Н•м.
10.Скорость идеального холостого хода
0=Uя / Сн= Uя н/Ен=110•105/94,6=122 рад/с.
Для построения искомой характеристики, которая представляет собой прямую линию, достаточно определить координаты двух точек: номинального режима и идеального холостого хода.
Для точки номинального режима определяют номинальную угловую скорость
н = 105 рад/с и номинальный момент (М = 23,8 Н-м).
Далее по приближенной формуле (1.2) (см. п. 3) находят сопротивление цепи якоря
Rя = 0,487 Ом.
Используя данные п. 11, определяют по формуле (1.10) скорость идеального холостого хода. По координатам точек идеального холостого хода
0=Uя / Сн= Uя н/Ен=110•105/94,6=122 рад/с.
( 0= 122 рад/с, М=0) и номинального режима ( н=105 рад/с., Мн=23,8 Н•м) на рисунке 1 строят естественную механическую характеристику ДПТ НВ. Естественная механическая характеристика также может быть представлена в относительных единицах, т. е. соответственно (1; 0) и ( н/ 0==105/122=0,86; Мн/ Мн= 1).
Примем кратность пускового тока Кi=2.1.

1.4. Расчет сопротивлений пусковых и тормозных резисторов, Построение искусственных механических и электромеханических характеристик ДПТ НВ
Задача 1.4. Для ДПТ НВ, рассмотренного в задаче 1.1, определить:
а) сопротивление пускового резистора, включаемого последовательно в цепь якоря для снижения начального пускового тока до величины Iп = 2Iн;
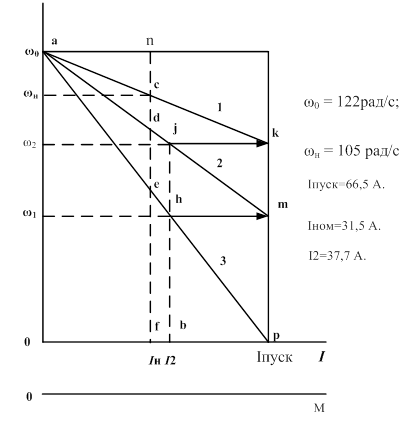
Для ДПТ НВ, рассмотренной в задаче 1.1, построить пусковую диаграмму при использовании двух ступеней пускового резистора и определить их сопротивление. Допустимый ток при пуске Iпуск= Кi •Iном= 2.1•31.5=66,5 А.
Ток холостого хода Iхх примем равным нулю.
Решение.
Пусковую диаграмму строят следующим образом.
1. Через точки a и k проводят естественную характеристику 1 двигателя.
2. Проводят вертикальную линию pmk, соответствующую Iпуск= 66.5 А.
3. Через точку а холостого хода с координатами (ω0 = 122рад/с; Iхх= 0) и точку p с координатами (ω = 0; Iпуск=66,5) проводят искусственную характеристику 3. Характеристика 3 соответствует двигателю с включеными в цепь якоря обеих секций пускового реостата Rд1 и Rд1.
4. Выбирают ток переключения I2 = (1,1... 1,2)Iн. Пусть I2= 37,7 А. Проводят вертикальную линию jhb, соответствующую I2 = 37,7 А.
5. Таким образом при пуске двигателя его рабочая точка перемещается из точки p по прямой 3 до точки h. При этом ток якоря уменьшается от Iпуск до I2, а частота вращения увеличивается от 0 до ω1.
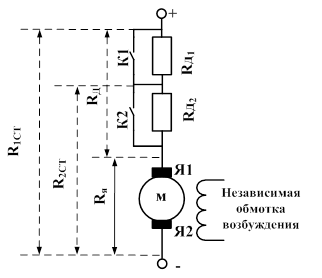
Рис. 4. Пусковая диаграмма (а) и схема включения пусковых резисторов в цепь якоря (ДПТ НВ)
6. Откладывают точку h на пересечения этой линии I2 с характеристикой 3 проводят линию hmω0. Находят частоту ω0 на которой происходит отключение первой секции реостата и новое увеличение тока якоря до значения пускового тока I1 в точке m.
7. Через точки а и m проводят искусственную характеристику 2, а через точку j отрезок kjω2 до пересечения с естественной характеристикой I.
Таким образом на отрезке mj прямой 2 привод разгоняется с частоты ω1 до частоты ω2, в которой происходит выключение последней второй секции реостата. Выключение второй секции сопровождается увеличением тока якоря до значения I1= Iпуск=65.5А с переходом в рабочую точку k на прямой 1 естественной характеристики привода.
8. Из точки k на прямой 1 естественной характеристики привода, происходит окончательный разгон привода с частоты ω2 до точки c, которой соответствует устойчивая номинальная частота ωн.
9.Для точного совпадения точек j, h, k, m на вертикали с абсциссами I1 и I2 проводят подбор величины тока I2.
В рассматриваемом случае для графического построения, выполненного на рисунке 4, а, имеются две секции пускового резистора R1ст и R2ст и две ступени сопротивлений при пуске R1ст и R2ст.
Сумма сопротивлений секций равна общему сопротивлению пускового резистора.
Определяют масштаб сопротивления Rн = 3,48 Ом, соответствующий отрезку nf= 63 мм, тогда mR = Rн/(nf) = 3,48/63 = 0.055 Ом/мм.
Сопротивлению R1ст соответствует отрезок ne = 30 мм:
R1ст = mR ne=0.055 • 30 = 1,65 Ом.
Сопротивлению R2ст соответствует отрезок nd= 17 мм
R1ст = mR nd=0.055 • 17= 0,935 Ом.
Определяют сопротивление первой секции пускового резистора, которому соответствует отрезок ne = 13 мм:
Rд1 = mR de=0.055 • 13= 0,715 Ом.
Определяют сопротивление второй секции пускового резистора, которому соответствует отрезок nd= 8 мм:
Rд2 = mR cd = 0,055 • 8 = 0,44 Ом.
Определяют сопротивление якоря
Rя= mR nc == 0.055 • 9 = 0,49 Ом.
Сумма сопротивлений секций пускового резистора может быть определена на основании (1.11):
Rд=Uн/Iдоп –Rя=110/66.5-0.49=1.16 Ом
Или
Rд == Rд1 + Rд2 =0.715 + 0.44 = 1,16 Ом.
Сопротивление пусковых резисторов можно определить аналитическим методом, который заключается в следующем. Составляют выражение для скорости ω1, исходя из второй и третьей реостатных характеристик (рис. 4, а):
ω1 =(Uн/Iдоп –Rя)/Cн =Uн/Cн= (I1R2ст)/Cн
Отсюда
I2R1ст = I1R2ст
Таким же способом записывают выражение для скорости ω 2 и находят соотношение I2R2ст = I1Rя или I2Rmст = I1Rя.
Отсюда находят выражение для определения сопротивления каждой ступени пускового резистора:
R1ст = (I1 / I2) mст Rя = λ mст Rя = 1.762 ·0.49 = 1,52 Ом;
R2ст = λ mст-1 Rя = R1ст λ =1,52 /1,76 ==0,86 Ом.
Сопротивление первой и второй секций пускового резистора:
Rд1 = R1ст -R2ст = Rя λ mст(λ -1) = 0,49 •1,761 (1,76-1) = 0,66 Ом;
Rд2 = R2ст-Rя = Rя λ mст-1(λ -1) = 0,49-1,76°(1,76-1) = 0,37 Ом.
Анализ результатов расчета показывает, что графический метод расчета пусковых резисторов ДПТ НВ более прост и нагляден, но менее точен, чем аналитический.
Задача 1.4. Для ДПТ НВ, рассмотренного в задаче 1.1, определить:
б) сопротивление цепи якоря аналитическим и графическим методами в абсолютных и относительных единицах при тормозном спуске груза для:
рекуперативного торможения с током Iт =Iн и скоростью ω = 1,3ω0,
в) динамического торможения двигателя с независимым возбуждением, начиная от значений тока Iт =Iн и скорости ωдт = ωн,
г) торможения противовключением Iт =Iн и ω*тп = ωтп / ωн = - 0,5, торможения противовключением при Iт =Iн когда двигатель работал в номинальном режиме с ωтп / ωн;
в) сопротивление ступеней пускового резистора графическим методом в абсолютных и относительных единицах, считая, что ток возбуждения в двигательном и тормозных режимах имеет номинальное значение.
Решение. Аналитический метод.
1. Сопротивление пускового резистора в абсолютных единицах определяют по (1.11), а в относительных — по (1.21):
Rд.п =Uя/Iп -Rя = Uн/(2·Iн) - Rя=110/(2·31.6)- 0.483=1.25 0м;
или в относительных (безразмерных) величинах
R*д.п = Rд.п /Iп = 1.25/3.48=0.36.
2. Сопротивление добавочного резистора при рекуперативном торможении (ω= 1.3·ω0 ) в абсолютных единицах (Rд.р.т) определяют по (1.12), а в относительных (R*д.р.т) –
по (1.21):
Rд.р.т =(Сн·1.3·ω0 –Uя)/Iт -Rя = =(0.9·1.3·122 –110)/31.6 – 0.487=0.55 Ом
или в относительных (безразмерных величинах- R*д.р.т):
R*д.р.т= Rд.р.т /Rн=0.55/3.48=0,16.
3. Сопротивление добавочного резистора при динамическом торможении в абсолютных единицах определяют по (1.13):
Rд.д.т =Ен/Iт -Rя = 94.6/31.6 -0.487=2.51 Ом.
R*д.д.т= Rд.д.т /Rн=2.51/3,48=0,72
4. Сопротивление добавочного резистора при тормозном спуске груза на половине от номинальной скорости (торможение противовключением при скорости 0.5·ω0) в абсолютных единицах определяют по (1.14):
Rд.д.т=(Uн+Е)/Iт-Rя=(Uн+Сн·0.5·ω0)/Iт-Rя = (110+0.9·0.5·122)·/31.6-0.487 =
=(110+94.6)/31.6 -0.487=4.73 Ом.
R*д.т.п= Rд.т.пRн= 4,73/3,48 =1,36.
5. Сопротивление добавочного резистора при торможении противовключением в абсолютных единицах определяют
Rд.д.т=(Uн+Е)/Iт-Rя=(Uн+ Е н)/Iт-Rя = (110+94.6)·/31.6-0.487 =
=(110+94.6)·/31.6 -0.487=5.99 Ом
R*д.т.п= Rд.т.пRн= 5.99/3,48 =1.72.
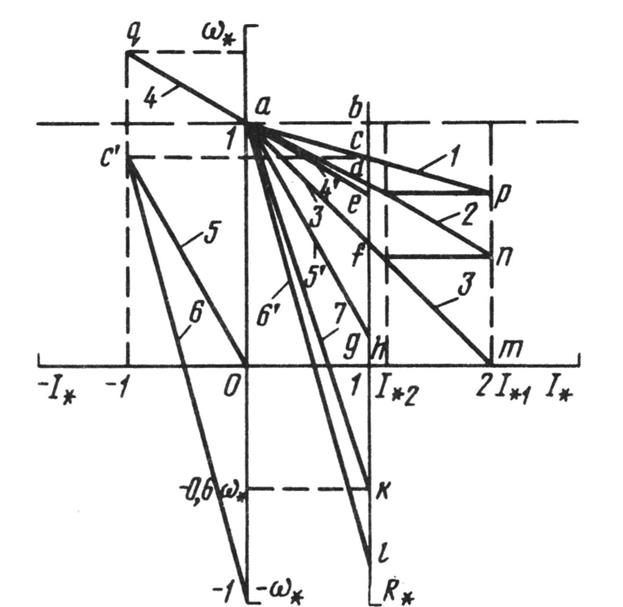
Графический метод. На рисунке 5 построены в относительных единицах следующие электромеханические характеристики:
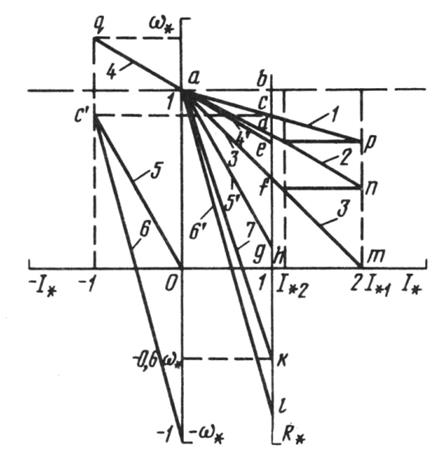
Рис. 5. Электромеханические характеристики ДПТ НВ для двигательного и тормозных режимов работы в относительных единицах.
1 — естественная характеристика двигателя с координатами точка a(ω/ω0 =1; М/Мн= 0) и точка c (ωc/ω0 =0.86; М/Мн =1);
2 — искусственная характеристика, соответствующая работе ДПТ НВ на 2-й пусковой ступени добавочного резистора, проведенная через точки а и n; с координатами точек a (ω/ω0 =1; М/Мн =0) и n (ω = ωn; М/Мн=2);
3 — искусственная характеристика, соответствующая пуску двигателя на 1-й ступени добавочного резистора с координатами точек a (ω/ω0 =1; М/Мн =0) и m (ω =0; М/Мн=2); проведенная через точки а и m
4 — искусственная характеристика при рекуперативном торможении с координатами точек q (ω/ω0 =1,3; М/Мн =-1) и a (ω/ω0 =1; М/Мн =0);
 Графический метод. На рисунке 5 построены в относительных единицах следующие электромеханические характеристики'
Графический метод. На рисунке 5 построены в относительных единицах следующие электромеханические характеристики'
1 — естественная характеристика двигателя с координатами точек (1; 0) и (0,86; 1);
2 — искусственная характеристика, соответствующая работе ДПТ НВ на 2-й пусковой ступени добавочного резистора, проведенная через точки а и А;
3 — искусственная характеристика, соответствующая пуску двигателя на 1-й ступени добавочного резистора с координатами точек 0;0)и(0; 1);
4 — искусственная характеристика при рекуперативном торможении с координатами точек (1,3;-1) и (1; 0);
4' — продолжение характеристики 4 до пересечения с вертикалью в точке е, проведенной через точку, соответствующую номинальному току на оси абсцисс;
5 — искусственная характеристика при динамическом торможении с координатами точек (0,86; -1);
5'— характеристика, проведенная параллельно характеристике 5 через точку (1; 0) до пересечения с вертикалью в точке д\
6 — искусственная характеристика двигателя в режиме торможения противовключением с координатами (0,86; -1) и (-1; 0);
6— характеристика, проведенная параллельно характеристике 6 через точку (1; 0) до пересечения с вертикалью в точке /;
7— искусственная характеристика двигателя при тормозном спуске груза с координатами (о» = 7; /» = 0) и (со* = - 0,5; Л = 1).
На рисунке 5 вертикальная линия Ы представляет собой ось сопротивлений, выраженных в относительных единицах /?, с началом отсчета в точке Ь.
Отрезок ЬН = 50 мм представляет собой номинальное сопротивление двигателя в относительных единицах К^ = ЬН/Ыг = 1, что соответствует К^ = 3,48 Ом.
Отрезок Ьс = 7 мм представляет собой сопротивление якоря в относительных единицах К^ = Ьс/Ыг =0,14 или К = К^ К = 0,14-3,48 = =0.49 Ом. я я я н
Отрезки электромеханических характеристик ДПТ НВ в двигательном и тормозных режимах (см. рис. 5), соответствующие сопротивлениям в относительных единицах и в омах пусковых и тормозных резисторов, приведены в таблице 2.
Таблица 2
| Сопротивления | ||
| Отрезки, мм | ||
| о.е. | Ом | |
| ^=13 К^=0,26 | ^=0,9 | |
| <^=6 /?^=°.12 | ^2 =0,42 | |
| У= 25 ^„,. = 0.5 | К^= 1,74 | |
| ^/=12 ^д1=0,24 | К^ = 0,84 | |
| с. =7,5 ^д.р.т=0^ | ^р.,=0.52 | |
| ^=85 ^...п,-^ | ^д,.„1 = 5.92 | |
| ^=^ ^д..п2=^ | ^,„.2=4.87 | |
| ^=37 ^д.д..=0,74 | ^..,=2,58 |
Задача 1.5. Для ДПТ НВ, рассмотренного в задаче 1.1, построить искусственные механические характеристики при: напряжении на якоре и = 0,5Е/ц; сопротивлении цепи якоря К = 5К^ магнитном потоке Ф = 0,8Ф^; действуют одновременно все условия.
Решение. Для построения искусственных характеристик, учитывая их прямолинейность, необходимо знать координаты двух точек. Этими точками могут быть: точка идеального холостого хода (со^ = со^; М = 0) и точка номинального режима нагрузки (со^ = со^ и М = Мц). ^
1. Скорость вращения идеального холостого хода якоря при и = =0,5^
0^1 = 0,5(/„/ С^ = 0,5 • 110/0,9 = 61 рад/с. Скорость вращения при М :=Л^ и Ј7= 0,5(7^
^.и! = ^ои! - ^Л ^н = 61 - 23'8 • ОЛ87/0.92 = 46,7 рад/с.
На рисунке 1 построена искусственная характеристика 2 при ^=0.5^/
2. При построении на рисунке 1 реостатной характеристики 3 координаты 1-й точки известны (122; 0), так как Од не зависит от сопротивления добавочных резисторов. Скорость вращения при М = М„ и К = 5^
со„ ^ = й)о - (м» • 5К»)' ^н = 122 ~ (23,8 • 5. 0,487)/ 0,92 = 50,4 рад/с.
3. Скорость вращения идеального холостого хода якоря при ослабленном магнитном потоке Ф = 0,8Ф
н
С0д„з = [/„ / 0.8С„ = 110/0,8 • 0,9 = 153 рад/с. Скорость вращения при М = А^д и Ф = 0,8Ф„
(/„ Мн-Л, 110 23,8.0,487,„,,
"••"'-о^-еу^-о^-р^^-130'6 рад/с-
На рисунке 1 для этого случая построена искусственная характеристика 4.
4. Скорость вращения идеального холостого хода якоря при 1/=0,5(/„,Ф=0,8Ф„
0,5(Л. 0,5-110,,,
^оЙ-о^оГ76'41"1^-
Скорость вращения при Мд = М„, V = 0,5 С/„, К = 5К^, Ф = 0,8Ф„
^н-5^ ^. 23,8 •5-0,487 „, о)ни4=(оои4-———-=76,4-——————=-35,4 рад/с.
(0,8 С„)2 (0,8.0,9)2
На рисунке 1 для этого режима построена искусственная характеристика 5.
1.5. Расчет сопротивлений пусковых и тормозных резисторов. Построение искусственных механических и электромеханических характеристик ДПТ ПВ
Задача 1.6. Используя данные задачи 1.2, построить реостатные характеристики для ДПТ ПВ при К = ЗК^.
Решение Аналитический метод. Имея расчетные данные естественной электромеханической характеристики (см. табл. 1), по формуле (1.36) определяют необходимые значения скорости для построения искусственной электромеханической характеристики
С/„~/,(^^д)
^-/д.
В результате расчета получают следующие значения: со^ = 228;
122; 66,5; 35,3; 22 рад/с.
На рисунке 3, а и б построены реостатные электромеханическая и механическая характеристики двигателя.
Графический метод. На рисунке 6 строят электромеханическую естественную характеристику (кривая 7). Влево от начала координат по оси абсцисс откладывают в масштабе значение внутреннего сопротивления цепи якоря К^ = 0,04 Ом и через полученную точку вверх параллельно оси ординат проводят линию К^.
Задавшись произвольным значением тока 7, = 80 А, проводят соответствующую вертикаль до пересечения ее с естественной характеристикой (точка со^). Из этой точки проводят горизонталь до пересечения с линией 2?д (точка <^). Определяют величину сопротивления, которое необходимо включить в цепь якоря двигателя, чтобы при неподвижном якоре ток был равен заданному значению ^ = = 80 А, К^ = и^11^ = 40/80 = 0,5 Ом. Отложив на оси сопротивлений значение 7?р через полученную точку б^ и точку а^ проводят наклонную прямую до пересечения с осью ординат в точке вр для которой К^ = 0. Наклонная прямая а^б^ характеризует изменение сопротивления цепи якоря в зависимости от скорости при неизменном токе /р
Аналогично определяют К^ = [7ц/1^ = 40/100 = 0,4 Ом при токе /з = 100 А, /?з = 0,2 Ом при токе /з = 200 А и т. д. и проводят соответствующие наклонные линии.
Реостатную характеристику строят в следующей последовательности. Задаются любым значением сопротивления цепи якоря К^ и проводят вертикаль, соответствующую этому сопротивлению (на-
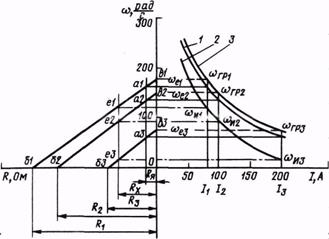
Рис. 6. Электромеханические характеристики ДПТ ПВ:
7 — естественная; 2 — искусственная; 3 — граничная
пример, К^ = 0,15 Ом). Из точки е^ к линии у(проводят горизонталь, получая при этом точку со^ искусственной электромеханической характеристики двигателя при К^ и токе 7р Аналогичные построения для токов 7^, 7^ и т. д. дают ряд точек искомой искусственной электромеханической характеристики (кривая 2). Пользуясь универсальными каталожными кривыми, по электромеханической характеристике строят механическую.
Для построения граничной электромеханической характеристики из точки в^ проводят горизонталь до линии 7р Точка пересечения со ^ соответствует граничной электромеханической характеристике двигателя. Аналогично получают и другие точки граничной характеристики (кривая 3) со ^, о з и т. д.
Задача 1.7. Для ДПТ ПВ, рассмотренного в задаче 1.2, рассчитать и построить пусковую диаграмму при пуске в две ступени при моменте сопротивления М^ = М^. Определить сопротивление цепи якоря в режиме торможения противовключением опускающего груза при угловой скорости вращения со = - 0,15 и токе 7^ = 7^.
Решение. 1. По данным расчета строят электромеханическую характеристику (рис. 7).
2. Задаются максимальным током при пуске 7^ = 1,677^ =1,67-96 = = 160 А и током переключения 7^ = 1,157„= 1,15 • 96 = 110 А.
3. Проводят вертикальные линии, соответствующие токам 7, и 7^, до пересечения с естественной характеристикой в точках 7 и 2.
4. Определяют внутреннее сопротивление двигателя 7?д = 0,04 Ом. Во втором квадранте в масштабе сопротивления по оси абсцисс откладывают отрезок ОН, равный 7?д = 0,04 Ом, и через точку Н проводят вертикаль.
5. Проводят через точки 7 и 2 горизонтальные прямые до пересечения с линией НРъ точках Е и Р.
6. Откладывают от начала координат отрезки О А = 7^ = 40/160 = = 0,25 Ом и 00, = 7^ = 40/110 = 0,36 Ом.
7. Соединяют точки А и Е, 0 и Р и получают прямые, которые отражают линейную зависимость между скоростью ДПТ и сопротивлением якорной цепи при неизменном токе якоря.
8. Через точку А проводят вертикальную линию до пересечения с прямой ОР в точке 5, затем через точку В проводят горизонтальную линию до пересечения с прямой АЕ в точке С.
Аналогично строят отрезки С^ и ^Е. Из построения следует, что отрезок ВС соответствует первой секции пускового резистора К р а отрезок ОЕ — второй секции К ^.
Из пусковой диаграммы (см. рис. 7) видно, что в момент пуска (со = 0) ток в якоре 7^ = 160 А, а сопротивление всей якорной цепи ^1ст = ^н ^ ^и1 = 40/160 = 0,25 Ом. При разгоне ДПТ до угловой скорости вращения о^ ток в якоре снижается до 7,. Происходит шунти-
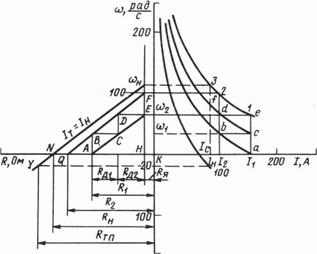
Рис. 7. Пусковая диаграмма ДПТ ПВ
рование первой секции пускового резистора 2?др Ток вновь возрастает до значения /р но ДПТ продолжает разбег по другой реостатной характеристике. При угловой скорости вощения со^ шунтируется вторая секция К^ и ДПТ выходит на естественную характеристику. Построение диаграммы считается правильным в том случае, когда отрезок ^Е будет находиться на горизонтальной линии, проходящей через точку 7. Если этого не произойдет, то построение следует повторить, варьируя /^ и /з. Для определения сопротивления тормозного резистора /?^, включаемого последовательно в цепь якоря, когда осуществляется торможение противовключением при токе /^ = /„ = 96 А и скорости опускания груза со = - 0,15 • со„ = - 0,15 • 130,9 = = - 20 рад/с, необходимо построить на рисунке 7 прямую со(^) и продолжить ее в область отрицательных скоростей вращения (прямая ЕА У).
| тает до значения 7р |
По оси ординат в область отрицательных скоростей откладывают значение со = - 20 рад/с и через полученную точку К проводят горизонталь до пересечения в точке У с прямой ЕА У. Отрезок УК в масштабе сопротивлений дает значение полного сопротивления цепи якоря К^ = 0,48 Ом.
Сопротивление добавочного резистора
УХ - ОН = 0,48 - 0,04 = 0,44 Ом.23

