




3.2.1 Определение пропускной способности коммутационного поля
На рисунке 3.1 приведена структура системы коммутации каналов. На вход системы поступает простейший поток вызовов с параметрами λ. Для вызова, поступающего на вход системы, может потребоваться соединение с одним и только одним каналом, причем безразлично, с каким именно, и по какому пути. Длительность обслуживания для всех непотерянных вызовов предполагается независимой и распределена по одинаковому для всех вызовов экспоненциальному закону со средней длительностью обслуживания, равной μ-1 параметры коммутационного поля считается заданным.
Любой вызов обслуживается управляющим устройством, которое получает информацию о поступлении вызова, его требованиях и состоянии самого коммутационного поля.
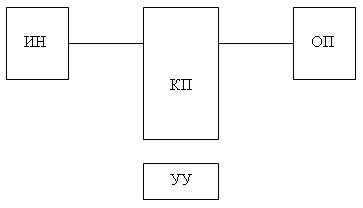
ИН – источник нагрузки; ОП – обслуживающий прибор; КП – коммутационное поле; УУ – управляющее устройство
Рисунок 3.1 – Структура системы коммутации
На основании такой информации управляющее устройство принимает и осуществляет решение об обслуживании данного вызова, если в момент поступления вызова имеется хотя бы один свободный обслуживающий прибор и соединительный путь к нему через коммутационное поле, или отказе в обслуживании в противном случае. Предполагается, что дисциплина обслуживания зависит только от трех факторов: номера, которому принадлежит данный вызов, номера выхода (обслуживающего прибора или канала связи), с которым требуется соединение, то есть от того, какие именно соединения установлены к моменту поступления рассматриваемого вызова и какими именно путями соединения проходят. Предположим также, что занимаемые пути соединения определяются случайно, а решение об обслуживании и установлении принимается управляющим устройством с интенсивностью Мс.
Влияние управляющего устройства сказывается только на этапе установления соединения, которое абонент ощущает в виде задержек зуммерных сигналов “Ответ станции” и “Контроль посылки вызова”.
В уже установленное соединение, управляющее устройство никаких задержек не вносит. Задержки зуммерных сигналов нормируется Рекомендацией МККТТ Q.514 и вычисляются согласно формуле:
F(t+)=1-e-(Mc-λ) t (3.16)
где F(t+) – значении функции распределения времени ожидания (ФРВО) конца обслуживания вызова системой в момент tдоп.
Для расчета производительности управляющего устройства исходными являются параметры F(t+), tдоп, λ. Подставляя их в (3.16), итеративным приближением находим минимальную производительность управляющего устройства Мс.
Пропускная способность коммутационного поля рассчитывается независимо от параметров (производительности, быстродействия) управляющего устройства и приведена ниже:
π = 
где А=λ/μ – интенсивность поступающей нагрузки;
[0]= 
Для полнодоступного пучка φХ=0, х=0, V-1, φv=1,
π=Ev(A)=  (3.17)
(3.17)
Исходными для расчета пропускной способности коммутационного поля являются, параметры π и А. Подставляя их в (3.17), итеративным приближением находим минимальную емкость пучка, обеспечивающую требуемую пропускную способность.
На проектируемую систему коммутации задан поступающий простейший поток вызовов с нагрузкой А=90 Эрл. Средняя продолжительность разговора μ-1=3 минуты (μ=20ч-1, минимальная производительность управляющего устройства Мс=5,5 с-1. Определим функцию распределения времени ожидания конца обслуживания вызова системой коммутации каналов F(t+) на уровне tдоп=0,6с и минимальной емкости V=10 каналов. Находим параметр поступающего потока вызова λ=Α*μ=1800 ч-1=0,5 с-1.
Решение произведем на языке программирования Pascsal.
program 3.l6;
uses crt;
const e=3.27;
var Ft,ly,t,mc:real;
begin
clrscr;
writeln('e=',e:4:2);
write('inter ly=');read(ly);
write('inter t=');read(t);
write('inter mc=');read(mc);
Ft:=1-exp((-(mc-ly)*t)*ln(e));
writeln('Ft=',Ft:4:4);
end.
inter ly=0.5
inter t=0.6
inter mc=3
Ft=0.9714
program 3.17;
uses crt;
const v=10;
var Pi,A,ly,u,sum,fi,fv:real;
z:array[1..v] of integer;i:integer;
begin
clrscr;
write('inter ly=');read(ly);
write('inter u=');read(u);
writeln('inter v=',v);
A:=ly/u;
writeln('A=',A:4:4);
sum:=0;
fi:=1;
fv:=1;
for i:=1 to v do
fi:=fi*i;
sum:=sum+exp(i*ln(A))/fi;
fv:=fv*i;
Pi:=exp(v*ln(A))/fv;
writeln('Pi=',Pi:4:10);
end.
inter ly=0.5 inter u=3
inter v=10 Pi:=0,0000000001.

Рисунок 3.2 - Структурная схема алгоритма программы 3.16

Рисунок 3.3 – Структурная схема алгоритма программы 3.17
3.2.2 Определение надежности систем коммутации с ненадежными элементами
Современные системы распределения информации представляют собой весьма сложный комплекс программно – аппаратных средств, и в связи с этим надежность всей системы зависит от надежности, как программного обеспечения, так и аппаратных средств.
Понятие надежности программного обеспечения связано с тем, что вычислительный процесс обслуживания вызовов, организуемый управляющим устройством, базируется в оперативном запоминающем устройстве, с информацией о текущем состоянии системы, хранящейся в оперативном запоминающем устройстве с информацией о текучем состоянии системы, хранящийся в периферийном управляющем устройстве. Разночтение между содержимым ОЗУ и ПУУ – вещь совершенно нормальная, ибо именно оно и служит для организации вычислительного процесса, в результате которого УУ «выравнивает» (проводит во взаимно однозначное соответствие) содержимое ОЗУ и ПУУ согласно алгоритму функционирования системы. Однако под действием случайных влияний (помех) содержимое ОЗУ и ПУУ может самопроизвольно (без ведома УУ) измениться и не вписаться в рамки разрешенных логических состояний, свойственных нормальному протеканию процесса обслуживания вызова. Поэтому УУ вынуждено тратить часть своей производительности на восстановление (регенерацию) истинного или, по крайней мере, разрешенного состояния системы. Регенерация производится автоматически операционной системой УУ без вмешательства оператора как в моменты спада нагрузки, так и на фоне обслуживания вызовов, и призвана удерживать пропускную способность системы от последствий помех. Способы и методы, с помощью которых достигается поставленная цель – построение надежного программного обеспечения, - есть сложная самостоятельная задача. Известные методы расчета пропускной способности систем распределения информации часто сводится к использованию одной из двух моделей, учитывающих только неисправность линий (под линией кроме самого комплекта соединительной линии принимается и соответствующие линейно – кабельные сооружения связи) как наименее надежного элемента системы.
В первой модели занятость линии определяется двумя потоками: собственно вызов (с интенсивностью λ, интенсивностью обслуживания μ, интенсивностью нагрузки A=λ/μ) и потоком моментов выхода из строя линий, образуемым конечным числом источников нагрузки – числом исправных линий. В состоянии с k исправными линиями интенсивность выхода одной из них из строя равна kω, интенсивность ее обслуживания θ, интенсивность нагрузки AL=ω/θ. Если предложить, что линии выходят из строя намного реже, чем поступают вызовы, имеем два независимых процесса: процесс обслуживания вызовов, который описывается формулой Эрланга с переменным числом исправных линий, и процесс выхода из строя и восстановления линий, где число исправных линий описывается распределением Энгсета. Следовательно, вероятность потери вызова на V-линейном пучке.
В= 
Во второй модели также имеются два потока: простейший поток вызовов с интенсивностью нагрузки A=λ/μ и простейший поток моментов выхода из строя линий, причем последний имеет абсолютный приоритет и интенсивность отказов AL=ω/θ. Вероятность потери источника вызова B=EV(A+AL), а полезная нагрузка A0= λ(1-B)tm, где tm- средняя длительность обслуживания источника вызова. Так как обслуживание вызова может быть прервано, то tm  μ-1, A0=A[1-EV(AL=a)]-A[EV(AL+A)-EV(A)].
μ-1, A0=A[1-EV(AL=a)]-A[EV(AL+A)-EV(A)].
Рассмотрим систему распределения информации, которая в общем виде (рисунок 3.4) состоит из абонентских комплектов, коммутационного поля, комплектов соединительной линии и управляющих устройств. К управляющим устройствам относятся центральное и периферийные управляющие устройства.

Рисунок 3.4 - Модель СМО с надежными элементами
Коммутационное поле имеет N входов, выходы КП разбиты на h направлений, пучок линий в j-м направлении содержит Vj линий (j=  ). Вызову, поступившему на вход системы, может потребоваться соединение с одной и только одной линией определенного для данного вызова направления, причем безразлично, с какой именно и по какому пути.
). Вызову, поступившему на вход системы, может потребоваться соединение с одной и только одной линией определенного для данного вызова направления, причем безразлично, с какой именно и по какому пути.
Поток вызовов, поступающий на вход системы, будем считать примитивным (пуассоновской нагрузкой второго рода), если число источников нагрузки N  100α/μ или простейшим (пуассоновской нагрузкой первого рода) при N>100α/μ. В первом случае параметр свободного источника вызовов α, интенсивность обслуживания вызова μ, интенсивность поступающей нагрузки a0=α/μ. Во втором случае параметр потока вызовов λ=Nα, интенсивность обслуживания μ, интенсивность нагрузки – А0=λ/μ. Вероятность того, что поступающий вызов i-го входа потребует соединения с j- м направлением может зависеть как от номера входа, так и от номера направления. Будем считать, что эта вероятность зависит только от j. В этих условиях характер потока вызовов в направлении сохранится, его интенсивность аj=kja0(Aj=kjA0). Структурные параметры КП предполагаются известными. Элементами системы обладают конечной надежностью.
100α/μ или простейшим (пуассоновской нагрузкой первого рода) при N>100α/μ. В первом случае параметр свободного источника вызовов α, интенсивность обслуживания вызова μ, интенсивность поступающей нагрузки a0=α/μ. Во втором случае параметр потока вызовов λ=Nα, интенсивность обслуживания μ, интенсивность нагрузки – А0=λ/μ. Вероятность того, что поступающий вызов i-го входа потребует соединения с j- м направлением может зависеть как от номера входа, так и от номера направления. Будем считать, что эта вероятность зависит только от j. В этих условиях характер потока вызовов в направлении сохранится, его интенсивность аj=kja0(Aj=kjA0). Структурные параметры КП предполагаются известными. Элементами системы обладают конечной надежностью.
Последнее означает, что на элементы системы воздействует поток неисправностей, который может быть примитивным или простейшим с интенсивность нагрузке АА.К. для абонентских комплектов, АК.Э для коммутационных элементов КП, АМ.С.для монтажных соединений АЛ для линейных (исходящих, входящих комплектов), АШ для шнуровых комплектов, АР для периферийных управляющих устройств, АС для центрального управляющего устройства. Поток неисправностей всегда примитивны, однако в тех случаях, когда параметр потока неисправностей одного элемента весьма мал, а число элементов велико, характер потока близок к простейшему. Интенсивности восстановления неисправных элементов системы соответственно равны ra.r.,…, rc.
Любой вызов обслуживается центральным управляющим устройством, имеющим Vс - кратный резерв, которое будучи в неисправном состоянии, через Vр периферийных управляющих устройств получает информацию о поступлении вызова, его требованиях (например, номере в направлении с которым нужно установить соединение или в номере входа по которому поступил вызовов), о состоянии сомой системы, то есть о том, какими путями в КП проходят установленные соединения и какие элементы системы исправны. Неисправные элементы системы обнаруживаются мгновенно.
На основании такой системы ЦУУ принимают и осуществляют решения об обслуживании данного вызова или отказе занятие соединительных путей КП происходит случайно. В случая неисправности ЦУУ всех поступающих системы вызова теряются. При неисправности АК теряются вызовы, поступающие на этот комплект. Восстановление неисправных элементов системы, работающей необслуживаемом режиме, начинается с момента прибытияре5монтно - восстановительной бригады.
За основу расчета примем факт что реальная способность системы определяется числом только исправных элементов. Образующих фактическую структуру системы. Таким образом, определение пропускной способности системы с ненадежными элементами, по сути, сводится нахождению фактической структуры (или нагрузки) и расчету пропускной способности известными методами для систем с абсолютно надежными элементами.
Коммутатор с ненадежными линиями.
Пусть N=n, j=h, Vj=V, s=1, где n – число входов в коммутатор; s – число звеньев коммутации. Надежность коммутационных элементов и монтажных соединений внутри коммутатора намного выше надежности выходов из коммутатора, то есть Ак.э.=Ам.с.=0, Ал>ю предположим, что линии (выходы из коммутатора) выходят из строя намного реже, чем поступают вызовы. Тогда имеем два независимых процесса: обслуживания вызовов с переменным числом dл обслуживающих (исправных) линий, а также выхода и восстановления линий, число неисправных линий в котором равно V-dл. следовательно, с учетом (3.16) вероятность потерь по времени
 , (3.18)
, (3.18)
где  - условные потери для вызовов первого потока в состоянии с y занятыми линиями второго потока и (V-y) занятыми первого потока.
- условные потери для вызовов первого потока в состоянии с y занятыми линиями второго потока и (V-y) занятыми первого потока.

где  – потери по формуле Энгсета на dл- линейном пучке;
– потери по формуле Энгсета на dл- линейном пучке;
 – потери по формуле Эрланга на dл линейном пучке.
– потери по формуле Эрланга на dл линейном пучке.
Далее приведена программа для расчета ненадежных линий в коммутаторе на языке BASIC. Программа вычисляет вероятность потерь p = Р в полнодоступном пучке с ненадежными линиями при известной емкости пучка V = 1, интенсивности нагрузки поступающего простейшего потока вызовов B = 25,56 на центральную станцию от оконечных станций, интенсивности нагрузки поступающего простейшего потока неисправностей А = 3.
10 INPUT A, B, V
20 V1 = V
30 A1 = B
40 GOSUB 220
50 D = 1
60 W = 1
70 Z = E1
80 IF V <= 0 GOTO 160
90 W = (W * A) / D
100 V1 = V - D
110 GOSUB 220
120 H = W * E1
130 Z = Z + H
140 D = D + 1
150 IF D <= V GOTO 90
160 V1 = V
170 A1 = A
180 GOSUB 220
190 P = Z / Z1
200 PRINT "P="; P
210 STOP
220 I1 = 1
230 W1 = 1
240 Z1 = 1
250 IF V1 <= 0 GOTO 280
260 W1 = (W1 * A1) / I1
270 Z1 = Z1 + W1
280 E1 = W1 / Z1
290 I1 = I1 + 1
300 IF I1 <= V1 GOTO 260
310 RETURN
320 END
? 2,5,1
Р = 0,879.
Выше была приведена программа расчета ненадежных линий в коммутаторе.
3.2.3 Оценка требуемого числа каналов и вероятности потери вызова методом динамики
Используемая формула Эрланга.
При технико – экономической оценке проектируемых канальных емкостей в функции числа абонентов и создаваемой ими нагрузки при заданных характеристиках качества обслуживания. Применительно к системам с коммутацией каналов основной характеристикой является вероятность потери первичного вызова, который для простейшего потока первичных вызовов совпадает с вероятностью занятости всех выходов в системе, или всех единичных каналов. В телефонных сетях требование к качеству по потерям вызовов обычно нормируется средним числом вызовов, приходящихся на один теряемый.
В классической теории телетрафика оценка вероятности Рn потери вызова традиционно базируется на модели многоканальной системы массового обслуживание с отказами. Размеченный граф состояние такой системы показан на рисунке 3.5. Здесь S0, S1, …,Sn - состояния, пронумерованные по числу занятых каналов (S0 – все каналы свободны; S1 – заняты один канал, остальные свободны; Sn – заняты все n каналов); интенсивность λ=1/Тз поступление заявок и интенсивность μ=1/tс обслуживания выражаются через средний интервал Tз (между поступлениями заявок) и среднее время tc обслуживания. Для оценки Pn используется формула В Эрланга, или первая формула Эрланга для системами с потерями:

S0 – все каналы свободны; S1 – заняты один канал, остальные свободны; Sn – заняты все n каналов
Рисунок 3.5 – Модель многоканальной системы
Pn=(Rn/n!)/  (3.19)
(3.19)
где R= λ/ μ – приведенная интенсивность поступление заявок на обслуживание. Если tc, Тз выражены в часах то R=tc/Тз может интерпретироваться как телефонная нагрузка в Эрлангах.
Определенные неудобства оперирования с факториалами (особенно при больших значениях n) заставляют для определения Рn или необходимого n при заданном числе N абонентов и фиксированном Рn пользоваться таблицами Еn(R) рекуррентной формулой Еn(R)=F[En-1(R),n,] либо приближением Стирлинга, практически приводящим к вычислению частного от деления близких табличных значений интеграла Лапласа.
Новая формула для числа каналов.
Метод динамики моментов базируется на тех же исходных линейных дифференциальных уравнениях теории непрерывных Марковских цепей, описывающих изменение вероятностей дискретных состояний в непрерывном времени, что и формула В Эрланга. Метод предусматривает агрегирование состояний однородных и независимых элементов системы на основании того, что среднее число Ei элементов, находящихся в i–м состоянии, есть произведение общего числа элементов n(ΣEi=N) на вероятность пребывания pi в состоянии I (рисунок 3.6).

1 – пассивное состояние элементов системы; 2 – состояние занятия каналов
Рисунок 3.6 – Состояние системы
В данном случае элементами системами являются абоненты, каждый из которых может находиться в одном из двух состояний: в пассивном 1 и в состоянии занятия канала 2 на время сеанса связи (рисунок 3.6).
Если λ и μ – интенсивности перехода одного абонента между состояниями 1,2, то уравнения динамики средних имеют вид:
dE1/dt=-λE1+ μE2;
dE2/dt=λE1+ μE2.;
отсюда для установившегося режима
dE1/dt=dE2/dt=0;
среднее число занятых каналов
Е2=Nρ+(1+ρ),
где ρ=λ/μ.
Пусть дискретная случайная величина на хij может принимать только два значения:
 |
хi = 1, если j-й элемент находится в состоянии i;
0,в противном случае.
Ряд распределения имеет для каждого j один и тот же вид:
| Значения хi | ||
| вероятности | 1-рi | pi |
Здесь pi – вероятность пребывания в состоянии i.
Поэтому дисперсия численности состояния i=2 есть сумма N одинаковых значений дисперсии величины xij=xi
D[x2]=(0-p2)2(1-p2)+ (1-p2)2,
то есть
D2=E2(1-E2/N)=Nρ(1+ρ)2.
В соответствии с “правилом трех сигм” практически возможное максимальное значение числа занятых каналов составляет Е2+3  (естественно, в предложении о нормального распределении числа занятых каналов). На этом основании требуемое число n каналов для обслуживания N абонентов, каждый из которых создают в ЧНН нагрузку ρ, выражается как:
(естественно, в предложении о нормального распределении числа занятых каналов). На этом основании требуемое число n каналов для обслуживания N абонентов, каждый из которых создают в ЧНН нагрузку ρ, выражается как:
n=(Nρ+K  ,; (3.20)
,; (3.20)
где
 2,2- при допустимости в среднем одного отказа на 70 вызовов;
2,2- при допустимости в среднем одного отказа на 70 вызовов;
К= 2,31 – для одного отказа в среднем на 100 вызовов.
K – коэффициент допустимости отказа, определяемый как значение аргумента (нормированного средним квадратическим отклонением) при подходящем значении функции нормального распределения. Заметим, что в (3.2) Nρ имеет тот же смысл, что R в (3.16).
Для оценки точности формулы (3.17) можно сравнить результаты вычислений по (3.17) с таблицами значений требуемого количества каналов n=n(N, Pn), вычисленных по En(R). Такое сопротивление для ρ=0,05 (то есть для нагрузки одного абонента 0,05 Эрл) показало, что даже для небольших значений n (порядка десятков) различие – менее 1%.
Вероятность потери вызова.
Для определенных выше (по методу динамики средних) математического ожидания E2 и дисперсии D2 и в соответствии с предположении о нормальном распределении случайной численности состояния (2) вероятность отказа Ротк можно выразить через интеграл Лапласа:
Ф(у)= 
то есть вероятность превышения такой случайной величиной значения n, или превышения отклонения от среднего Е2=Nρ/(1+ρ) величины n-E2:
Ротк  ; (3.21)
; (3.21)
Подстановка (3.17) в (3.18) дает Ротк  1-2F(K). Ошибка
1-2F(K). Ошибка
 Ротк=Ротк-Рn;
Ротк=Ротк-Рn;
где Рn соответствует (3.16) и определяется только ошибкой  по (3.17), а также ошибкой, связанной с предположением о нормальном распределении численности состояния.
по (3.17), а также ошибкой, связанной с предположением о нормальном распределении численности состояния.
Влияние ошибки на погрешность определения Ротк по формуле (3.18) можно оценить из сопоставления с вычислениями по (3.17) при К=2,2…2,31, (то есть для Ротк=0,1…0,014), N  20 и значениях 0,04
20 и значениях 0,04 
 0,01, характерных для нагрузки создаваемых для ЧНН средним абонентам квартирного телефона. В частности, Ротк<0,03Рn для n=(0.01…0,015)n и погрешность определения Ротк из-за ошибки оценки n порядка 1…1,5% составляет менее 3%или по абсолютному значению Ротк 0,0004. следовательно существенной может быть только погрешность, вносимая допущением о нормальном законе распределения.
0,01, характерных для нагрузки создаваемых для ЧНН средним абонентам квартирного телефона. В частности, Ротк<0,03Рn для n=(0.01…0,015)n и погрешность определения Ротк из-за ошибки оценки n порядка 1…1,5% составляет менее 3%или по абсолютному значению Ротк 0,0004. следовательно существенной может быть только погрешность, вносимая допущением о нормальном законе распределения.
Напишем программу на языке Pascal для расчета вероятности потери вызова, а на рисунке 3.7 приведем ее алгоритм.
program laura1;
uses crt;
const n=10;
var Pn,Rn,Rj,ly,nu,sum,R,f,f2:real;
a:array[1..n] of integer;j:integer;
begin
clrscr;
writeln('inter number of chanel n=',n:1);
write('inter ly =');readln(ly);
write('inter nu =');readln(nu);
R:=ly/nu;
writeln('result R=',R:4:10);
f:=1;
for j:=1 to n do
f:=f*j;
writeln('fa=',f:4:10);
Rn:=exp(n*ln(R))/f;
writeln('result Rn=',Rn:7:10);
sum:=0;
f2:=1;
for j:=1 to n do
begin
f2:=f2*j;
Rj:=exp(j*ln(R));
sum:=sum+(Rj/f2);
writeln('sum=',sum:7:10);
end;
Pn:=Rn/sum;
writeln('Pn=',Pn:7:10);
end.
n=10
Рn=0,0000151088

Рисунок 3.7 – Алгоритм расчета вероятности потери вызова

