




Общие сведения
Приборы и датчики давления. Назначение
Приборы и датчики давления используются на ЛА для измерения давлений воздуха, газов и жидкостей в элементах авиадвигателя и в различных бортовых системах (система тормозов, выпуска шасси, закрылков).
Приборы, предназначенные для измерения положительного избыточного давления, называют манометрами, приборы для измерения отрицательного давления – вакуумметрами, а приборы для измерения абсолютного давления – барометрами. Манометры входят в состав широко применяемых на ЛА манометрических пилотажно-навигационных приборов.
Наряду с приборами, информация которых воспринимается и обрабатывается человеком, на ЛА широко применяются датчики, преобразующие давление в электрический сигнал, используемый в САУ и в вычислительных устройствах.
1.2 Методы измерения давления
1.2.1 Пружинный метод
Основан на зависимости деформации упругого чувствительного элемента от приложенного давления. В манометрах деформация передается на отсчетное устройство, а в датчиках – преобразуется в электрическую величину, которая и служит выходным сигналом (рисунки 1.1, 1.2).
1.2.2 Силовой метод
Основан на зависимости силы или момента сил, развиваемых упругим или неупругим чувствительным элементом, от приложенного давления. По этому методу строятся две разновидности приборов и датчиков давления:
а) силовые датчики прямого преобразования, в которых развиваемая чувствительным элементом сила преобразуется с помощью электрического преобразователя в электрическую величину. В качестве электрических преобразователей могут быть использованы угольные, полупроводниковые, пьезоэлектрические, магнитоупругие элементы;
б) приборы и датчики с силовой компенсацией, в которых сила, развиваемая чувствительным элементом, уравновешивается силой, создаваемой компенсирующим элементом. В зависимости от типа компенсирующего устройства выходным сигналом может служить сила тока, линейное или угловое перемещение. Силовой метод применим для измерения давления в весьма широких пределах.
1.2.3 Частотный метод
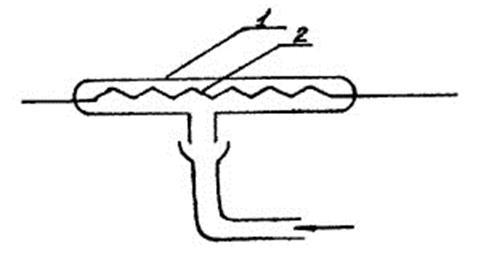
Метод основан на зависимости частоты собственных колебаний тонкостенного цилиндрического резонатора от разности давлений, действующих на его внутреннюю и внешнюю поверхности. Датчики, построенные по этому методу, называются вибрационными датчиками давления (ВДД). Выходным сигналом ВДД может служить частота электрических импульсов, что позволяет использовать ВДД в системах с ЦВМ (рисунок 1.3).
1.2.4 Пьезорезисторный метод
Основан на зависимости электрического сопротивления проводника или полупроводника от величины воздействующего на него давления (рисунок 1.4).
1.2.5 Термокондуктивный метод
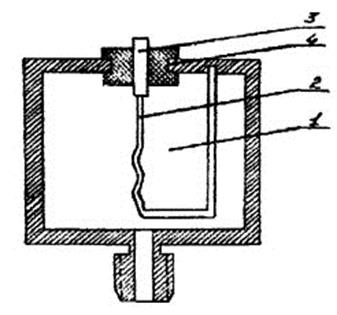
Основан на зависимости теплопроводности газа от его абсолютного давления (при малых абсолютных давлениях). При протекании по проволоке электрического тока, сила которого поддерживается постоянной, температура нагрева проволоки будет зависеть от теплопроводности окружающего газа, которая линейно изменяется в зависимости от давления в области малых давлений. Температуру проволоки можно измерять с помощью приваренной к ней термопары. Чувствительность термокондуктивных датчиков зависит от состава газа (рисунок 1.5).
1.2.6 Ионизационный метод
Основан на зависимости степени ионизации газа от давления. В зависимости от типа датчиков ионизация создается за счет электронной эмиссии или радиоактивным излучением. Электронный датчик представляет собой трехэлектродную электронную лампу с накаливаемым катодом, внутрь которой подается измеряемое давление. При наличии разности потенциалов между анодом и катодом, превышающей ионизационный потенциал газа, молекулы газа ионизируются электронами, летящими от катода к аноду. При этом на отрицательно заряженной сетке образуются положительные ионы и создается сеточный ионизационный ток, величина которого при Р=10-3мм.рт.ст. пропорциональна абсолютному давлению, если анодный ток постоянен. Выходной величиной служит ионизационный ток (рисунок 1.6).
1.2.7 Электрокинетический метод
Основан на возникновении электрокинетического потенциала полярной жидкости при ее перетекании через пористую диафрагму. Построенный по этому методу датчик давления содержит диафрагму из керамики, помещенную внутрь цилиндрического объема, ограниченного двумя мембранами и заполненного полярной жидкостью (раствор йодистого калия). При воздействии на мембраны разности давлений часть жидкости перетекает через диафрагму, за счет этого образуется разность потенциалов, снимаемая двумя платиновыми электродами, помещенными по обе стороны диафрагмы. Электрокинетические датчики применимы для измерения только переменных давлений, т.к. при постоянном давление перетекание жидкости через диафрагму с течением времени прекращается.
Частотный диапазон измеряемого давления может быть от десятых долей до нескольких сотен Гц, диапазон измеряемых давлений – от тысячных долей до десятков атмосфер. Недостатком электрокинетических датчиков является большая температурная погрешность (рисунок 1.7).
1.3 Электрические дистанционные манометры
ЭДМ предназначены для выдачи визуальной информации об измеряемом давлении на некотором расстоянии от места, где производится замер. В комплект обычно входят датчик и указатель, соединенные между собой электропроводкой, подключенной к источнику питания.
Датчик может быть построен по одному из методов, рассмотренных ранее.
Схемы ЭДМ могут быть трех типов: гальванометрические, логометрические и компенсационные.
1.3.1 Гальванометрические схемы ЭДМ
Это схемы, в которых выходной параметр датчика сопротивление, индуктивность или емкость преобразуется в силу тока J, измеряемую c помощью гальванометра.
Недостатком схемы, типа приведенного на рисунке 1.8, является зависимость измеряемой гальванометром силы тока J от напряжения U0 источника питания, а для схем, питаемых переменным током – и от частоты f переменного тока. Подобные схемы могут применяться при наличии источника питания с высокой точностью стабилизации.
Влияние изменений напряжения и частоты источника питания на результаты измерения практически исключается в логометрических и компенсационных схемах.
1.3.2 Логометрические схемы ЭДМ
Это схемы, в которых выходной параметр датчика сопротивление, индуктивность или емкость преобразуется в два тока J1 и J2; отношение этих токов измеряется с помощью логометра.
На рисунке 1.10 представлена схема ЭДМ с потенциометрическим датчиком давления и двухрамочным магнитоэлектрическим логометром. Характеристика схемы определяется уравнением:
 ,
,
где  - переменные сопротивления (Ом);
- переменные сопротивления (Ом);
 ,
,  ,
,  - постоянные сопротивления плеч моста;
- постоянные сопротивления плеч моста;
 ,
,  - сопротивления рамок логометра (Ом);
- сопротивления рамок логометра (Ом);
 - добавочное сопротивление (Ом).
- добавочное сопротивление (Ом).
1.3.2.1 Логометры
Многие электрические величины, например, сопротивление, емкость, индуктивность, частота и т.п. (пассивные величины) сами по себе не являются носителями электроэнергии и для измерения они должны быть предварительно преобразованы в какую – либо электрическую величину, обычно в ток. Такое преобразование осуществляется с помощью специальных схем (измерительной цепи, питаемой от внешнего источника.)
Для того чтобы показания измерительного устройства, измеряющего пассивную величину, зависели бы только от этой величины и не зависели от напряжения источника питания, в таких измерительных схемах применяются логометры – механизмы, измеряющие отношение двух величин, обычно токов. Иными словами показания логометра определяются не абсолютным значением подведенных к нему электрических величин, а только их отношением, что позволяет сделать показания независимыми в известных пределах от напряжения источника питания.
Поскольку логометр измеряет отношение двух величин, его механизм состоит из двух элементов, на каждый из которых действует одна из электрических величин, образующих измеряемое соотношение. Подвижные части элементов жестко соединены между собой и снабжены одним указателем. Вращающие моменты, создаваемые обоими элементами, направлены навстречу друг другу, причем по мере поворота подвижной части оба момента меняются, например, один из моментов уменьшается, а другой увеличивается (или остается постоянным). Равновесие наступает при равенстве обоих моментов.
По аналогии с обычными механизмами, момент, стремящийся повернуть подвижную часть в положительном направлении (по часовой стрелке), будем называть вращающим, тогда другой момент, создаваемый такой же электрической величиной, будет противодействующим. При отсутствии токов на подвижную часть не действуют никакие моменты, и она занимает любое случайное положение.
В качестве примера на рисунке 1.11 показано устройство одной из конструкций логометра магнитоэлектрической системы. В магнитном поле постоянного магнита вокруг сердечника 1 из магнитомягкого материала может поворачиваться подвижная часть из двух жестко скрепленных рамок 2 и 3 по которым проходят токи J1 и J2. В рамках возникают направленные навстречу вращающие моменты M1 и M2 и подвижная часть занимает положение равновесия, соответствующее условию M1=M2.
Для устройства логометра могут быть использованы механизмы любой из систем, входящих в электромеханическую группу, однако наибольшее распространение получили логометры: магнитоэлектрические, электродинамические, ферродинамические.
В логометре вращающие моменты создаются действующими величинами токов J1 и J2 и могут быть выражены:
При равновесии  ,
,  , откуда
, откуда
или
 .
.
Как было показано выше, логометры в сочетании с измерительной целью находят применение для измерения многих электрических и неэлектрических величин. Шкала логометра обычно градуируется непосредственно в единицах измеряемой величины.
Магнитоэлектрические логометры находят широкое применение для измерения сопротивления – омметрах и мегомметрах, в выпрямительных частотомерах и в устройствах для измерения неэлектрических величин (температуры, давления, уровня жидкости и др.), в которых находят применение преобразователи измеряемой величины в сопротивление.
1.3.3 Компенсационные схемы ЭДМ
Это схемы, в которых измерение параметра сопротивления, индуктивности или емкости осуществляется с помощью самобалансирующегося моста (рисунок 1.9).
Компенсационные схемы в большинстве своем являются самобалансирующимися мостовыми схемами, в одно или два плеча которых включены переменные сопротивления, индуктивность или емкость, а напряжение снимаемое с диагонали моста, подается через усилитель на малоинерционный электродвигатель, поддерживающий мост в состоянии равновесия путем вращения через редуктор компенсирующего электрического преобразователя (потенциометрического, индуктивного, емкостного), также включенного в одно или два плеча моста.
1.4 Указатели электрических дистанционных манометров
В зависимости от типа выбранной электроизмерительной схемы УДМ может представлять собой гальванометр, логометр или следящий привод (электропривод).
На ЛА наибольшее применение нашли логометрические дистанционные манометры. Рассмотрим более подробно работу такого манометра на примере прибора типа ЭДМУ.
ЭДМУ (электрический дистанционный манометр унифицированного типа) предназначен для измерения давления жидкостей и газов в авиационных двигателях различных типов и выпускается с диапазонами измерения: от 0-1 кг/см2 и до 0-100 кг/см2. В комплект манометра входят: датчик, указатель и соединительные провода.
В качестве чувствительного элемента в манометрах с диапазоном измерения до 3 кг/см2 применяются манометрические коробки, а в манометрах с диапазоном свыше 3 кг/см2 гофрированные мембраны.
Структурную схему ЭДМУ можно представить в виде рисунка 1.12, где
1 - упругий чувствительный элемент;
2 – передаточно – множительный механизм;
3 – потенциометр;
4 – электроизмерительная схема логометра;
5 – электроизмерительный прибор (логометр);
α – угол поворота стрелки указателя;
Р – давление (кг/см2);
S1, S2 – перемещение чувствительного элемента;
r1, r2 – сопротивление потенциометра;
J1, J2 – токи в рамках логометра.
При включении в диагональ мостика источника питания в рамках логометра протекают электрические токи, соотношение которых зависит от измеряемого давления. При отсутствии давления Р=0 ток J 1 в рамке I имеет наибольшее значение, а ток в рамке II отсутствует J 1I =0 (рисунок 1.8). В этом случае магнитное поле создается только рамкой I, и магнит располагается вдоль оси рамки I, а стрелка указывает, что давление отсутствует.
С увеличением давления ток в рамке I уменьшается, а в рамке II увеличивается. Соответственно уменьшается магнитный поток рамки I и увеличивается поток рамки II, при этом ось результирующего магнитного поля поворачивается. В этом же направлении поворачивается магнит со стрелкой. Когда давление достигает значения Р=0,5Рmax, мостовая схема становится симметричной, и токи, протекающие в рамках, равны между собой. В этом случае ось результирующего магнитного поля расположена симметрично (под равными углами к осям рамок I и II).
При максимальном значении Р=Рmax ток в рамке I уменьшается до 0 и стрелка показывает наибольшее давление (рисунок 1.13).
При отключении питания стрелка возвращается к нулю при помощи дополнительного неподвижного магнита m, взаимодействующего с основным магнитом М (рисунок 1.10). Датчик Д 10 содержит упругий чувствительный элемент, внутрь которого подается давление Р (на лабораторной установке измеряемое давление имитируется перемещением стрелки вручную). С увеличением давления центр чувствительного элемента перемещается и передвигает через передаточно - множительный механизм, щетку G, скользящую по потенциометру АВ.
Логометр с подвижным магнитом М и неподвижными рамками I и II помещается в указателе. Там же расположены остальные элементы мостовой схемы (добавочные сопротивления).
Дистанционная передача работает следующим образом (рисунок 1.10): участки потенциометра АВ и СВ образуют два переменных плеча мостовой схемы. Два других плеча постоянны (R1 и R2). Сопротивление R5 дополняет сопротивление рамки I до величины, равной сопротивлению рамки II (рамки имеют равное количество витков, но сопротивления их различны за счет того, что габариты рамок неодинаковы, т.к. конструктивно одна пара рамок расположена внутри другой пары).
1.5 Погрешности ЭДМ
1 Погрешности, вносимые датчиком:
а) погрешности характеристики (шкаловые погрешности), вызываемые неполной взаимной компенсацией нелинейности характеристик чувствительного элемента и передаточно – множительного механизма (или электрического преобразователя). Эти погрешности минимизируют путем индивидуальной регулировки механизма;
б) погрешности, обусловленные влиянием вредных сил, к числу которых относятся, прежде всего, силы трения в передаточно – множительном механизме и электрическом преобразователе, силы от неуравновешенности подвижных частей; электромагнитные или электростатические силы от взаимного притяжения или отталкивания подвижных и неподвижных частей электрического преобразователя. Уменьшение этих погрешностей возможно следующими путями:
- снижением вредных сил за счет улучшения качества опор;
- увеличением эффективной площади чувствительного элемента;
- применением дифференциальных электрических преобразователей, у которых в начальном положении силы притяжения взаимно скомпенсированы;
- применением следящих систем, разгружающих чувствительный элемент от трения;
в) температурные погрешности манометров, вызываемые влиянием температуры окружающей среды на физические параметры материалов и геометрические размеры деталей. Наиболее существенно температура влияет на модуль упругости чувствительного элемента. Уменьшение температурных погрешностей достигается следующими способами:
- изготовлением чувствительного элемента из сплавов, обладающих малым температурным коэффициентом модуля упругости;
- введением в конструкцию прибора специальных биметаллических компенсаторов, которые вызывают в зависимости от температуры приращение показаний прибора, равное по величине и противоположное по знаку температурной погрешности;
- применением дифференциальных электрических преобразователей, включенных по схеме делителя напряжений и выдающих два переменных параметра z1 и z2. Величина снимаемого напряжения зависит от соотношения z1/z2 и важно обеспечить лишь равенство температурных коэффициентов параметров z1 и z2;
г) погрешности от гистерезиса упругого последействия. Снижение этих погрешностей достигается выбором материалов с хорошими упругими свойствами.
2 Погрешности, вносимые электрической схемой, возникают при изменении температуры окружающей среды. Оценка величины этих погрешностей ведется путем анализа уравнения электрической схемы. Температурные погрешности могут быть уменьшены введением в схему термокомпенсаторов.
3 Погрешности, вносимые указателем, в основном следующие:
а) погрешности, обусловленные действием на подвижную систему моментов вредных сил – сил трения и небаланса. В логометрах с подвижным магнитом вредные моменты могут создаваться также вследствие взаимодействия между подвижным магнитом и экраном при эксцентриситете, эллиптичности и других дефектах экрана;
б) погрешности от люфтов в опорах указателя;
в) погрешность от магнитного гистерезиса в материале экрана логометра с подвижным магнитом. Эта погрешность уменьшается при использовании для экранов пермаллоя (железо – никелевый сплав) с большим содержанием никеля.
2 Описание лабораторной установки
2.1 Лабораторное оборудование
Лабораторное оборудование состоит из:
1. Панель, на которой смонтированы контрольные приборы (миллиамперметры) для замера токов J1 и J2 в рамках логометра указателя ЭДМУ-6; датчика манометра Д-10 со шкалой, проградуированной в кг/см2; вольтметра контроля напряжения питания Uпит=27±2,7В;
а) схема собрана по принципу логометрического моста;
б) давление имитируется вручную перемещением стрелки датчика по шкале.
2. Магазинов сопротивлений – 3 шт.
2.2 Основные технические данные
1. Диапазон изменения давления 0-6 кг/см2.
2. Рабочий участок шкалы измерителя 1-5 кг/см2.
3. Манометр работает в диапазоне температур внешней среды от +50˚С до -60˚С.
4. Допустимые погрешности и вариация манометра, измерителя и датчиков при раздельных проверках при нормальной температуре приведены в таблице 2.1.
Таблица 2.1
| Проверяемые отметки шкал измерителя в кг/см2 | Допустимые погрешности показаний в кг/см2 | Вариация показаний в кг/см2 | ||
| измеритель | датчик | измеритель | датчик | |
| 1-3 4-5 | ±0,1 ±0,2 | ±0,17 ±0,25 | 0,1 - | 0,17 - |
5. Манометр рассчитан на питание постоянным током напряжением 27±2,7В.
Таблица 2.2 Значение сопротивлений в (Ом) и материал
| Элементы схемы макета | R Ом | Материал |
| Потенциометр АВ Рамка 1 Рамка 2 R1 R2 R3 R4 R5 | RАВ=225 R01=280 R02=220 R1=700 R2=700 R3=170 R4=2280 R5=60 | Константан Медь Медь Константан Константан Константан Медь |
3 Порядок проведения работы
3.1 Определение погрешности указателя и определение токов в рамках I и II при нормальной температуре (+15˚С)
1. Переключатель П1 поставить в положение I.
2. Включить установку в сеть ~ 220В. Установить по вольтметру напряжение питания 27В.
3. Осторожно перемещая стрелку датчика по направлению часовой стрелки через каждое деление соответствующее 1 кг/см2 от 0 до 5 кг/см2 имитируют изменение давления Рд кг/см2, одновременно снимают показания стрелки указателя Ру кг/см2 и величины токов J1 и J2 по миллиамперметрам. Результаты заносят в таблицы 3.1, 3.3, 3.5.
Таблица 3.1
| Рд, кг/см2 | Ру, кг/см2 | J1, мА | J2, мА | J1 / J2 | ΔР=Рд-Ру, кг/см2 |
4. Отключить питание 27В.
3.2 Определение инструментальной температурной погрешности. Исследование температурной компенсации
1. Температуру окружающей среды принять +15˚С.
2. Испытание прибора на температурную погрешность производить при одном из значений температур +40˚С, +50˚С, +60˚С (по заданию преподавателя), без помещения прибора в термостат.
3. Рассчитать изменение сопротивления полудиагоналей  ,
,  ,
,  , зависящих от изменения температуры окружающей среды по формуле:
, зависящих от изменения температуры окружающей среды по формуле:
 ,
,
где  - сопротивление рамок при
- сопротивление рамок при  ˚= +15˚С;
˚= +15˚С;
α – температурный коэффициент электрического сопротивления;
α=0,004 град-1 – для меди;
α=1,4·10-5 град-1 – для константана;
Δt – разность между температурой окружающей среды и задаваемой температурой.
 ,
,
 ,
,
 ,
,
где  - сопротивление полудиагонали:
- сопротивление полудиагонали:
Значения  ,
,  ,
,  и
и  выбираются из таблицы 2.2.
выбираются из таблицы 2.2.
3 Переключатель П1 поставить в положение II.
4 На магазине сопротивлений набрать полученные величины сопротивлений  и
и  (имитируется изменение сопротивлений рамок логометра) и подключить их соответственно к клеммам 1 и 3; к клеммам 2 подключить третий магазин сопротивлений с набранной величиной сопротивления полудиагонали
(имитируется изменение сопротивлений рамок логометра) и подключить их соответственно к клеммам 1 и 3; к клеммам 2 подключить третий магазин сопротивлений с набранной величиной сопротивления полудиагонали  .
.
5 Включить питание 27В.
6 Снять показания указателя при введенной температурной компенсации при изменении давления от 0 до 5 кг/см2. Ключ П1 в верхнем положении показывает значения Ру без компенсации, а в нижнем – с компенсацией. Результаты заносят в таблицу 3.2.
Таблица 3.2
| Рд, кг/см2 | Ру', кг/см2 без компенсации | Ру'', кг/см2 с компенсацией |  без компенсации без компенсации
|  с компенсации с компенсации
|
7 Отключить питание 27В.
3.3 Обработка результатов исследования
По данным таблиц 3.1 и 3.2 построить следующие графики:  ;
;  ;
;  ;
; 
3.4 Определение зависимости угла поворота подвижной системы от изменения токов в рамках логометра
1. Рассчитать характеристику магнитной системы указателя:  . Угол поворота при синусоидальном распределении магнитной индукции вдоль зазора и при одинаковых параметрах рамок определяется по формуле:
. Угол поворота при синусоидальном распределении магнитной индукции вдоль зазора и при одинаковых параметрах рамок определяется по формуле:
 ,
,
где  .
.
Величины токов  и
и  берутся из таблицы 3.1. Результаты расчетов сводятся в таблицы 3.3; 3.5.
берутся из таблицы 3.1. Результаты расчетов сводятся в таблицы 3.3; 3.5.
Таблица 3.3
/ 
| ||||||
| А | ||||||
| Α |
2. Рассчитать характеристику датчика  :
:
Перемещение щетки потенциометра в зависимости от давления Р вычисляется по формуле:  ,
,
где  - перемещение центра мембраны в зависимости от изменяемого давления Р. Для упрощения будем считать прямолинейной зависимостью с началом в точке 0, а величина Рmax равна максимальной величине отклонения стрелки указателя;
- перемещение центра мембраны в зависимости от изменяемого давления Р. Для упрощения будем считать прямолинейной зависимостью с началом в точке 0, а величина Рmax равна максимальной величине отклонения стрелки указателя;
 - передаточное число (от мембраны к потенциометру);
- передаточное число (от мембраны к потенциометру);
 - длина намоточной части потенциометра ( =16мм);
- длина намоточной части потенциометра ( =16мм);
 - максимальное перемещение мембраны, которое при любом диапазоне измерения должно быть одним и тем же (от 1 до 1,2мм).
- максимальное перемещение мембраны, которое при любом диапазоне измерения должно быть одним и тем же (от 1 до 1,2мм).
Результаты расчетов свести в таблицы 3.4 и 3.5.
Таблица 3.4
| Р | ||||||

|
Таблица 3.5
| Х, мм | Ру, кг/см2 | J1, мА | J2, мА | у, мм | А | α˚ |
| 0,2 0,4 0,6 0,8 1,0 1,2 |
3. Характеристику электрической схемы прибора  определяем по данным таблицы 3.5. Для упрощения считаем ее прямолинейной.
определяем по данным таблицы 3.5. Для упрощения считаем ее прямолинейной.
4. Методом графического сложения (методом четырех квадрантов) найти искомую зависимость  . Примерное построение показано на рисунке 3.1.
. Примерное построение показано на рисунке 3.1.
По данным таблицы 3.5 характеристика магнитной системы указателя строится в четвертом квадранте; характеристика датчика строится во втором квадранте ; характеристика электрической схемы прибора строится в третьем квадранте; в первом квадранте ищется характеристика шкалы указателя .
В каждом графике сдвинуть начало отсчета от нуля, чтобы он находился только в одном квадранте.
Сделать вывод по работе.
Оформить отчет.
Варианты заданий
Таблица 3.1
| Рд, кг/см2 | Ру, кг/см2 | J1, мА | J2, мА | J1 / J2 | ΔР=Рд-Ру, кг/см2 |
| 0,5 1,23 2,11 3,02 3,92 5,0 |
Таблица 3.2
| Рд, кг/см2 | Ру', кг/см2 без компенсации | Ру'', кг/см2 с компенсацией | без компенсации
| с компенсации
|
| 0,48 1,27 1,89 2,88 3,81 4,87 | 0,485 1,25 1,9 2,85 3,85 4,85 |
Таблица 3.1
| Рд, кг/см2 | Ру, кг/см2 | J1, мА | J2, мА | J1 / J2 | ΔР=Рд-Ру, кг/см2 |
| 0,5 1,29 2,2 3,1 3,8 5,0 |
Таблица 3.2
| Рд, кг/см2 | Ру', кг/см2 без компенсации | Ру'', кг/см2 с компенсацией | без компенсации
| с компенсации
|
| 0,47 1,2 1,7 2,9 3,86 4,9 | 0,473 1,12 1,77 2,92 3,91 4,96 |
Таблица 3.1
| Рд, кг/см2 | Ру, кг/см2 | J1, мА | J2, мА | J1 / J2 | ΔР=Рд-Ру, кг/см2 |
| 0,5 1,25 2,1 3,0 3,9 5,0 |
Таблица 3.2
| Рд, кг/см2 | Ру', кг/см2 без компенсации | Ру'', кг/см2 с компенсацией | без компенсации
| с компенсации
|
| 0,47 1,2 1,7 2,9 3,86 4,9 | 0,478 1,15 1,79 2,91 3,89 4,96 |
Таблица 3.1
| Рд, кг/см2 | Ру, кг/см2 | J1, мА | J2, мА | J1 / J2 | ΔР=Рд-Ру, кг/см2 |
| 0,4 1,1 2,1 3,3 4,2 5,0 |
Таблица 3.2
| Рд, кг/см2 | Ру', кг/см2 без компенсации | Ру'', кг/см2 с компенсацией | без компенсации
| с компенсации
|
| 0,35 1,2 1,8 2,5 3,6 4,6 | 0,335 1,13 1,73 2,62 3,77 4,89 |
Таблица 3.1
| Рд, кг/см2 | Ру, кг/см2 | J1, мА | J2, мА | J1 / J2 | ΔР=Рд-Ру, кг/см2 |
| 0,5 1,4 2,4 3,2 4,05 5,0 |
Таблица 3.2
| Рд, кг/см2 | Ру', кг/см2 без компенсации | Ру'', кг/см2 с компенсацией | без компенсации
| с компенсации
|
| 0,48 1,3 1,8 2,8 3,8 4,83 | 0,485 1,25 1,9 2,85 3,85 4,85 |
Требования к отчету
Отчет должен содержать:
1. цель работы;
2. схему установки;
3. основные расчетные формулы;
4. таблицы исходных данных и результатов эксперимента;
5. график зависимости , построенный с помощью метода графического сложения (метод четырех квадрантов);
6. вывод.
Список использованных источников
1. Браславский Н.А. Приборы и датчики ЛА. 1970г.
2. Боднер Л.А. Приборы первичной информации. 1981г.
Приложение А
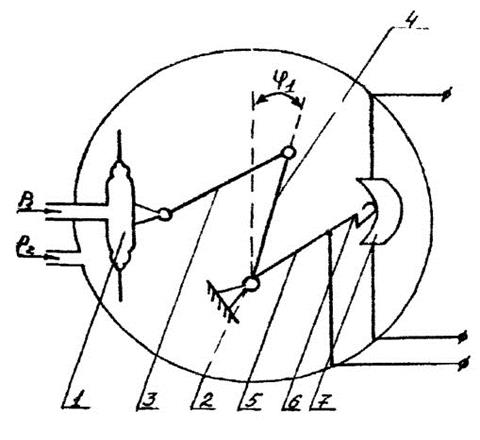
1 – упругий ч.э.; 2 – герметичный корпус;
3 – шатун; 4 – кривошип; 5 – рычаг
6 – щетка; 7 - потенциометр
Рисунок П.А.1.1 – Пружинный датчик давления
Продолжение приложения А
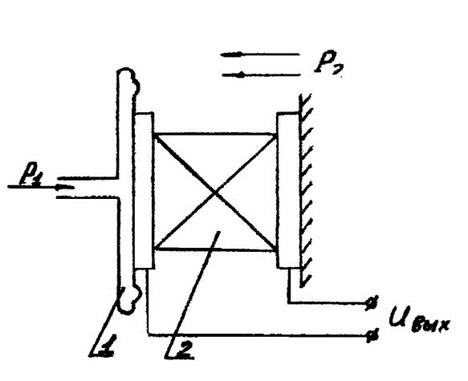
1 – чувствительный элемент (мембрана)
2 – электрический преобразователь
Рисунок П.А.1.2 – Силовой датчик давления
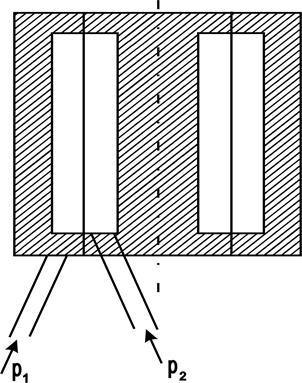
Рисунок П.А.1.3 – Вибрационный датчик давления
Продолжение приложения А
1 – герметичный корпус; 2 – манганиновый резистор
3 – вывод; 4 – изоляционная трубка
Рисунок П.А.1.4 – Пьезорезисторный датчик давления
1 – стеклянный баллон;
2 – платиновая спираль
Рисунок П.А.1.5 – Термокондуктивный датчик давления
Продолжение приложения А
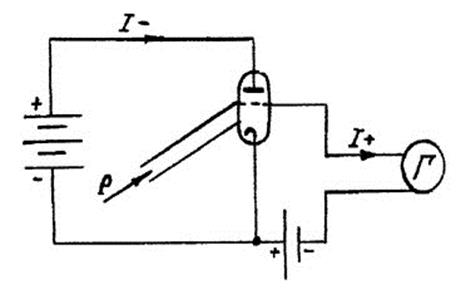
Рисунок П.А.1.6 – Электронный датчик давления
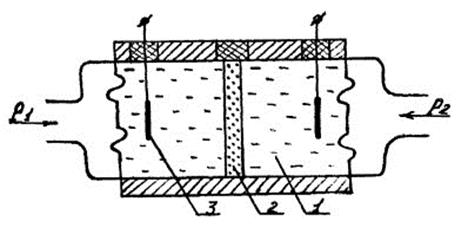
1 – электролит; 2 – пористая диафрагма;
3 – платиновые электроды
Рисунок П.А.1.7 – Электрокинетический датчик давления
Продолжение приложения А
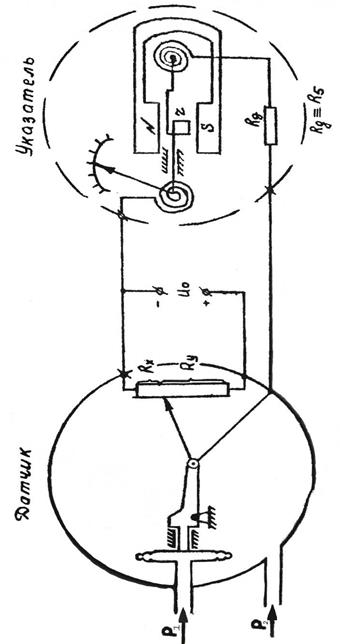
Рисунок П.А.1.8 – Гальванометрическая схема ЭДМ
Продолжение приложения А
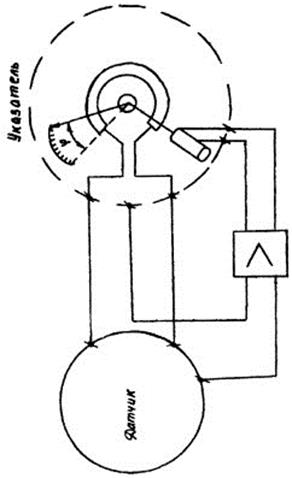
Рисунок П.А.1.9 – Компенсационная схема ЭДМ
Продолжение приложения А
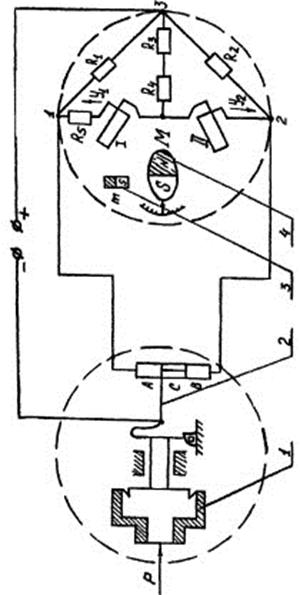
1 – чувствительный элемент; 2 – щетка
3 – магнит неподвижный; 4 – магнит подвижный
Рисунок П.А.1.10 – Принципиальная схема манометра
продолжение приложения А
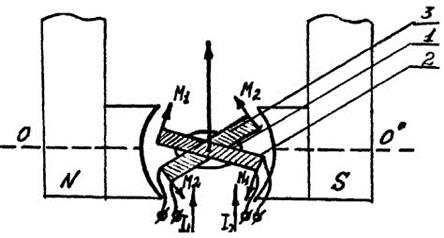
Рисунок П.А.1.11 – Магнитоэлектрический логометр с миндалевидным сердечником
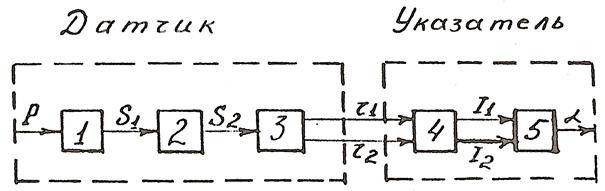
Рисунок П.А.1.12 – Структурная схема ЭДМУ
Продолжение приложения А
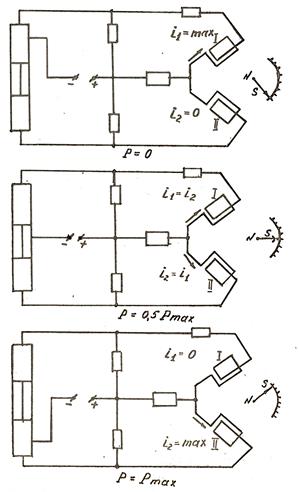
Рисунок П.А.1.13 – Схемы работы ЭДМУ
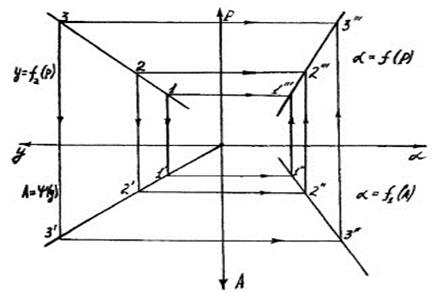
Рисунок П.А.3.1 – Пример графического построения характеристики шкалы указателя

