




При вращении вала тахометра 10 (рис. 29 а) через конические шестерни 9 получает вращение магнитный узел 2. Образуется вращающееся магнитное поле, которое индуцирует в чувствительном элементе 8 вихревые токи.
В результате взаимодействия магнитного поля вращающихся магнитов с индукционными токами чувствительного элемента возникает вращающий момент. Вращающему моменту чувствительного элемента 8 противодействует момент спиральной пружины 7, укрепленной на оси этого элемента. Так как момент спиральной пружины пропорционален углу ее закручивания, то угол поворота чувствительного элемента пропорционален частотам вращения магнитного узла и соответственно частотам вращения вала двигателя. На другом конце оси чувствительного элемента укреплена стрелка 5, показывающая по равномерной шкале 4 частоту вращения вала.
Для повышения устойчивости стрелки и получения отсчета показаний прибора применено демпфирование подвижной системы тахометра. При движении подвижной системы магнитный поток магнитов 6 наводит в алюминиевом диске демпфера 3 вихревые токи, в результате взаимодействия которых с магнитным потоком магнитов подвижная система получает тормозящий момент.
Тахометр типа 8ТМ отличается от тахометра типа ТМ тем, что у первого приводной валик расположен перпендикулярно циферблату. Элементы поз. 9 и 10 в принципиальной схеме на 8ТМ отсутствуют.

Что представляет собой механический тахометр типа ТМи?
Тахометр типа ТМи представляет собой комплект, состоящий из датчика-генератора трехфазного тока и магнитно-индукционного измерителя. Тахометр предназначен для дистанционного измерения частоты вращения диска двигателя.
Дистанционное измерение частоты вращения основано на принципе электрической дистанционной передачи вращения вала двигателя валу магнитно-индукционного измерительного узла измерителя и преобразования частоты вращения вала в угловые перемещения стрелки измерителя. Электрическая дистанционная передача частоты вращения в тахометре основана на ее преобразовании датчиком-генератором в ЭДС с частотой, пропорциональной частоте вращения вала, и на свойстве системы трехфазных токов создавать магнитное поле.
Преобразование частоты вращения вала в угловое перемещение стрелки магнитноиндукционным измерительным узлом основано на взаимодействии магнитного поля вращающихся постоянных магнитов с индукционными токами, наведенными этим полем в металлическом диске. В результате этого взаимодействия возникает вращающий момент диска (связанного со стрелкой), уравновешиваемый пружиной. Момент пружины пропорционален углу его закручивания.
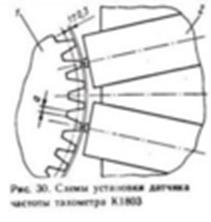

Что представляет собой тахометр типа К1803?
Тахометр К1803 - дистанционный, унифицированный, электронный, показывающей, аналоговый, с шкальным отсчетом, с выходным сигналом постоянного тока 0 - 10 В. Он имеет два класса точности:
1,0 - при работе с реверсивным валом; 1,5 - при работе с нереверсивным валом. Тахометр может быть использован для определения частоты вращения вала диаметром 30 - 1125 мм; диапазон измерения 0 - 4000 об/мин. Тахометр обеспечивает безотказную работу 5000 ч без непосредственного обслуживания и контроля.
Датчики для измерения усилий и крутящего момента.
Какие типы датчиков используются для измерения усилий, крутящего момента и мощности?
В судовых условиях часто возникает задача определения усилий, крутящего момента на валу и мощности. Для этой цели используются приборы, называемые торсиометрами. В качестве измерителей момента в них применяют фотоэлектрические, индуктивные и тензометрические датчики.
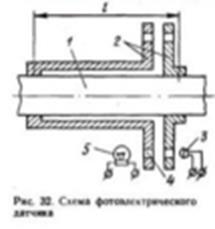
В чем заключается принцип действия фотоэлектрических датчиков?
Принцип действия фотоэлектрических датчиков основан на измерении интенсивности светового потока, идущего от источника (рис. 32) к фотоэлементу. Интенсивность пучка света, попадающего на приемник 3, зависит от утла скручивания вала и крутящего момента. Происходит это следующим образом: на валу на расстоянии насажаны два диска 2, отверстия 4 в которых совпадают, если вал не испытывает скручивания. В противном случае соосность отверстий нарушается, и поток света, идущий от лампы 5 к фотоэлементу 3, уменьшается. Вследствие чего изменяется сила тока на выходе фотоэлемента. Выходной сигнал с элемента 3 поступает в усилитель.
Что представляют собой тензодатчики?
Работа тензодатчика основана на свойстве металлической проволоки или фольги при растяжении или сжатии изменять свое электрическое сопротивление, он наклеивается на деталь машины и воспринимает ее деформацию. Отдельный тензодатчик измеряет растяжение только в одном направлении.
Для измерения четыре тензодатчика включаются по схеме моста таким образом, чтобы было сложение электрических сопротивлений.
Какие тензорезисторы находят применение в настоящее время?
Для увеличения чувствительности тензорезисторов выбирают материалы с высоким коэффициентом тензочувствительности, большим удельным сопротивлением и малым поперечным сечением. Наиболее часто в тензорезисторах применяют константан. Он имеет незначительный температурный коэффициент сопротивления, что уменьшает погрешность, вызванную колебаниями температуры. В тензорезисторах, изготовленных из константана. в широком диапазоне сохраняется линейная зависимость между относительной деформацией и изменением сопротивления. Для работы при повышенных температурах рекомендуется изготовлять тензорезисторы из нихрома.
Тензорезисторы могут быть выполнены из проволоки и фольги. Конструктивно проволочный тензорезистор (рис. 33) представляет собой решетку из проволоки диаметром 0,01 - 0,05 мм, уложенную зигзагообразно на длине S2 и ширине si между двумя электроизоляционными подложками. К концам проволоки присоединены выводные концы. Электроизоляционные подложки выполняют из папиросной бумаги, лаковой пленки или цемента, скрепляемых между собой клеем, лаком или цементом. Зигзагообразную часть тензорезистора называют решеткой. Проволочные тензорезисторы выполняют сопротивлением 10 - 100 Ом. Они имеют размеры 2 - 100 мм.
На чем основано действие датчиков крутящего момента и мощности?
Все способы измерения крутящего момента основаны на измерении вызываемой им упругой деформации. Угол скручивания у цилиндра зависит от крутящего момента М, модуля упругости G и полярного момента инерции 1р:

Магнитный поток в этой области почти не изменяется. Элемент датчика, состоящий из железных пластин, имеет то преимущество, что обмотки пронизываются магнитным потоком по всей своей длине, и выходное напряжение не зависит от неравномерного распределения нагрузки. Первичная и вторичная 2 (рис. 38 б) обмотки выполнены таким образом, что при отсутствии действующих сил противоположно направленные магнитные поля компенсируют друг друга и на выходе получается нуль. При наличии сил магнитные линии изменяют свою форму, так как в горизонтальной области между отверстиями уменьшается относительная магнитопроницаемость. При наиболее высоких нагрузках поток, пересекающий вторичную обмотку, достигает почти 20 % общего потока. Напряжение V во вторичной обмотке пропорционально действующей силе. У границы же диапазона измерений линейность этой зависимости нарушается. Напряжение достигает таких значений, что показывающие приборы могут не иметь усилителей.
Какие требования предъявляются к датчикам крутящего момента?
К датчикам предъявляют следующие требования: 1) область измерения должна соответствовать рабочему диапазону значений крутящего момента, 2) изменение частоты вращения не должно влиять на измерения, 3) должно быть исключено влияние дополнительных напряжений сжатия, изгиба и центробежных сил.




На рис. 38 а показано сечение магнитно-эластичного датчика по одной из пластин железа. Между отверстиями 2, через которые проходят витки обмоток, в направлении действия силы F образуется разгруженная зона.


Принципиальная схема включения датчика приведена на рис. 38,6.
Как устроены индуктивные датчики крутящего момента?
В индуктивных датчиках изменение сопротивления катушек в зависимости от утла скручивания является выходным сигналом прибора.
На рис. 39 показана схема такого устройства. Вместе с валом вращаются закрепленные на нем магнитопроводы 2, 5, 6. Индуктивные катушки 4 уложены в неподвижном сердечнике 3. Если вал не испытывает скручивания, то индуктивности 1 и La катушек, питающиеся переменным током, одинаковы. При передаче валом 1 крутящего момента зазоры между магнитопроводами 6 и 2 с одной стороны и магнитопроводами 6 и 5 с другой становятся неодинаковыми, вследствие чего появляется разность индуктивностей 1 - La, что и является выходным сигналом.
Датчики для измерения перемещений.
Для чего применяют потенциометрические преобразователи?
Потенциометрические преобразователи служат для преобразования углового или линейного перемещений в электрический сигнал. Наиболее часто применяют проволочные Потенциометрические преобразователи с непрерывной намоткой.
Как действуют индуктивные датчики перемещения?
Магнитный поток катушки проходит через железный сердечник, сердечник 3 и воздушный зазор 6. При перемещении сердечника изменяется воздушный зазор 6, а следовательно, и самоиндукция L катушки 2 (рис. 41). Преимущество индуктивных датчиков - они не изнашиваются и имеют большую чувствительность. Основной недостаток - пропорциональная зависимость между изменением индуктивности L и перемещением сохраняется только в определенных небольших пределах. В большинстве случаев применяют два индуктивных датчика с одним общим якорем. Датчики включены в мостовую цепь таким образом, что при увеличении самоиндукции одного датчика самоиндукция другого уменьшается (рис.42 а). Для измерения больших перемещений применяют цилиндрические реверсивные индуктивные преобразователи (рис. 42 б). Магнитопровод преобразователя 2 изготовлен в виде цилиндрической трубки, которая вместе с двумя крышками 4 является ярмом. Якорь 3 имеет цилиндрическую форму. Диск из ферромагнитного материала предназначен для увеличения магнитной проводимости. По обе стороны от диска установлены две катушки 5.




Как устроены трансформаторные преобразователи?
Цилиндрический дифференциально-трансформаторный преобразователь (рис. 43) имеет три обмотки — первичную Wn и две вторичные W1 + W2, которые установлены на общем изоляционном каркасе.
Первичная обмотка, состоящая из двух последовательно включенных обмоток, уложена по всей длине преобразователя. Вторичные обмотки расположены одна в верхней, а другая в нижней части преобразователя и соединены между собой последовательно встречно. Такое расположение обмоток обеспечивает более равномерное распределение электромагнитного поля. Преобразователь имеет якорь 2 и магнитопровод 3 из листовой электротехнической стали. Обе детали имеют цилиндрическую форму.

В нейтральном положении якоря магнитные потоки, пронизывающие вторичные обмотки, равны. При этом выходное напряжение равно нулю. Перемещение якоря приводит к изменению магнитных потоков и наведению во вторичных обмотках трансформаторных ЭДС, не равных друг другу, а следовательно, к появлению выходного напряжения. С изменением направления перемещения якоря меняется фаза выходного напряжения на 180°.
Датчики и приборы для измерения уровня жидкости.
В каких емкостях на судне необходимо контролировать уровень жидкости? Объектами измерения (контроля, сигнализации) уровня являются цистерны, танки, баки с топливом, водой и маслом, находящиеся под атмосферным давлением, и емкости под давлением при значительных температурах.
Какие датчики и приборы применяют для контроля за уровнем жидкости?
Для контроля за уровнем применяют водоуказательные стекла, устроенные в виде колонок, действующих по принципу сообщающихся сосудов.
Сниженные указатели уровня действуют по принципу измерения гидростатического давления столбов воды в конденсационном сосуде или в барабане котла с помощью V-образной трубки (дифференциальный манометр), заполненной цветной жидкостью, плотность которой больше плотности воды. Такой указатель уровня может быть установлен на значительном расстоянии от котла, что позволяет обеспечить дистанционное наблюдение за уровнем.
Регуляторы различают по способу измерения уровня и усиления.
Для измерения уровня применяют поплавковые, мембранные термогидравлические и другие преобразователи с электрическим выходным сигналом.
Какова область применения поплавковых датчиков уровня?
Поплавковый датчик уровня в условиях качки может давать ложные сигналы, поэтому его применение - системы сигнализации, регуляторы прямого действия.
Это связано с тем, что качество регуляторов уровня с чувствительными поплавковыми элементами (они бывают шарообразной или цилиндрической формы) невысоко из-за трения в сочленениях рычажной системы. Неточности в измерении уровня увеличиваются во время качки судна, условиях вибрации.

На рис. 45 а показана схема поплавкового датчика уровня. Выходным сигналом являются перемещение рычага 6 и усилие Q, развиваемое на конце рычага. Величины 6 и Q пропорциональны уровню в емкости.
Место выхода рычага из емкости обычно уплотняют с помощью сильфона.
Как действуют мембранные датчики уровня и каковы их особенности?
Для измерения уровня часто используют мембранные датчики (рис. 45 б). С помощью мембраны 5 измеряется высота столба жидкости в трубах 3 и 4. В трубе 3 высота столба воды постоянная. Она зависит от среза трубы в конденсационном сосуде. В трубе 4 согласно принципу сообщающихся сосудов устанавливается уровень, одинаковый с уровнем в барабане котла. Таким образом, мембрана 5 находится под действием разности столбов, пропорциональной изменению уровня в барабане 2. Эти измерители уровня сконструированы так, что примерно 80 % усилия, развиваемого мембраной, уравновешивается грузом 6, а оставшиеся 20 % -пружиной. Кроме того, что груз уравновешивает значительную часть усилия, он компенсирует изменение столбов жидкости при качке.
Как действуют мембранные датчики уровня с электрическим выходным сигналом? Для измерения уровня на судах широко используются мембранные датчики, в которых линейное перемещение преобразуется в электрический сигнал. Рассмотрим пневмоэлектрический датчик уровня (рис. 46). Датчик имеет две мембранные коробки 2, состоящие из двух одинаковых мембран, соединенных по диаметру. Мембранные коробки сообщаются между собой с помощью капиллярной трубки 3. Под действием давления столба жидкости нижняя мембранная коробка сжимается, вследствие чего происходит выдавливание воздуха через капиллярную трубку в верхнюю мембранную коробку. Давление в этой коробке повышается, и она расширяется. Деформация мембранной коробки происходит до тех пор, пока давление воздуха не уравновесится силой упругости мембран.
К верхней мембранной коробке прикреплен якорь дифференциального трансформаторного преобразователя. При деформации коробки якорь перемещается, поэтому выходное напряжение преобразователя будет определяться уровнем контролируемой жидкости.

Какие датчики уровня распространены на судах с автоматизированным управлением?
На суднах с автоматизированным управлением, особенно без постоянной вахты в машинном отделении, применяют автоматическое поддержание уровня во многих емкостях, например в расходных цистернах топлива. При этом обычно используют поплавковые реле. Большое распространение на судах иностранной постройки нашли поплавковые реле уровня фирм "Мобрей" и "Беста", а также типа CPM-2S.
Что представляет собой реле уровня фирм "Мобрей" и "Беста"?
Реле уровня "Мобрей" (рис. 47 а) состоит из следующих основных частей: 1 -поплавка, изготовленного из металла монель; 2 - магнита подвижного 4 и неподвижного, 6 контактов. В корпусе 3 на керамическом основании 5 выполнен механизм переключения. Крышка 7 изготовлена из алюминиевого сплава.
Основным преимуществом данного реле является то, что поплавковая часть отделена от контактной. Эти части механически не связаны. Постоянные магниты в поплавковой и контактной частях находятся в кожухах из немагнитного материала. Магниты установлены так, что одинаковые полюсы находятся один против другого, и потому отталкиваются. В положении, показанном на рис. 47 а, поплавок находится внизу, правый конец магнита 2 поднят, левый конец магнита в контактной части опущен, и верхние контакты замкнуты. Когда шток поплавка проходит среднюю линию, подвижной контакт размыкает один неподвижный контакт и замыкает другой.

Какое назначение поплавкового реле типа CPM-2S?
Датчик поплавково-магнитный с удлиненным ходом типа CPM-2S (рис. 49) служит для сигнализации уровня жидкостей, в том числе топлива и масла, в открытых и напорных резервуарах, а также в паровых котлах во взрывобезопасной атмосфере (относится к окружающей среде резервуара).

Датчик поплавково-магнитный CPM-2S состоит из следующих основных узлов: поплавка, контактного триггера, корпуса. Поплавок в виде плотного сосуда круглого сечения соединен шарнирно при помощи рычага с кронштейном, в котором установлены плотно постоянные магниты. Этот узел крепится при помощи оси в той части корпуса, которая находится внутри резервуара. Штифты, установленные в кронштейне, позволяют четырех ступенчато изменять ход поплавка.
Рычаг является сменным элементом. Удлиняя рычаг, увеличивают ход поплавка, сокращая - уменьшают. Наружная часть корпуса представляет собой камеру, отделенную тонкой стенкой от резервуарной части. В камере находится в изоляционной колодке узел контактного триггера.
Что представляет собой уровнемер ATM?
Уровнемер ATM предназначен для дистанционного замера уровня в судовых танках. Принцип действия - гидростатический. Прибор можно использовать для следующих жидкостей: морской и пресной воды, дизельного и тяжелого топлива, смазочного масла.
Как действует индуктивный поплавковый датчик уровня?
Схема датчика рассматриваемого типа показана на рис. 50. Датчик имеет поплавковую камеру 2, выполненную из немагнитной стали. Камера соединяется с резервуаром, уровень жидкости в котором контролируется. Снаружи поплавковой камеры расположены две катушки, имеющие коническую форму. Внутри нее находится, сферический поплавок 3 из магнитной стали, который перемещается в зависимости от уровня жидкости в камере. Перемещение поплавка приводит к изменению индуктивностей L и La катушек. Благодаря пружинным кольцам 4 поплавок не может выйти из зоны катушек. Коническая форма катушек позволяет получить линейный закон изменения их индуктивностей при перемещениях поплавка.

Рассмотренный датчик представляет собой реверсивный индуктивный преобразователь. Индуктивные поплавковые датчики нашли применение в автоматических системах измерения и поддержания уровня жидких хладагентов судовых холодильных установок. Диапазон измерения уровня жидкости равен 0,4 метра.

Что представляет собой поплавковое реле ПРУ-5М?
Принцип работы реле основан на получении сигнала небаланса моста переменного тока при изменении индуктивного сопротивления катушек датчика, включенных в плечи моста преобразователя 4 (рис. 51).

Как действует система индикации уровня СУМ-21?
Система индикации СУМ-21 предназначена для измерения уровня в грузовых танках судна и емкостях на берегу, в которых могут быть помещены такие жидкости, как сырая нефть, нефтепродукты, вода и другие, радиолокационным методом. С помощью СУМ-21 данные показываются на стрелочном приборе и передаются на другие блоки. Систему можно устанавливать на палубе, поэтому ее техническое обслуживание не вызывает трудностей.
Система индикации уровня СУМ-21 не должна иметь контакта с измеряемым веществом. Ультразвуковой метод дает ограниченную точность, потому что скорость звука меняется в зависимости от температуры среды и смеси газов в среде. Для оптического метода требуется прозрачная среда, что не всегда можно обеспечить. Радиолокационный метод не зависит от температуры, состава, давления среды. Отражение происходит на самой поверхности независимо от состава жидкости и плотности.
Из каких компонентов состоит система СУМ-21?
Система СУМ-21 состоит из 38 датчиков и центрального устройства. Датчики монтируются на фланце крышки танка и соединяются с центральным устройством кабелем. Каждый датчик подсоединен своим кабелем. Электроника датчиков собирается в заменяемых прочных кассетах. В датчике радиолокационный передатчик направляет луч на поверхность жидкости, от которой он отражается и улавливается системой. Расстояние измеряется методом частотно-модулированной непрерывной волны, который часто используется в радиолокаторе. Радиолокационный передатчик дает выходной сигнал с постоянной амплитудой, но переменной частотой.
Как используется свойство электропроводимости жидкости для измерения уровня? Свойство электропроводимости жидкости используется только в сигнализаторах предельных значении уровня.

Ограниченная область применения объясняется тем, что в судовых условиях трудно избежать загрязнения зонда, что значительно изменяет сопротивление между чувствительным элементом и стенкой резервуара.
Применяются ли емкостные датчики для измерения уровня?
Емкостные датчики нашли широкое распространение для измерения уровня жидкости в танках. Датчик может иметь один или два электрода, в последнем случае роль одного электрода играет стенка танка. Второй электрод должен быть изолирован от токопроводящей жидкости. Принцип действия датчика основан на изменении емкости пластинчатого конденсатора в зависимости от расстояния (в данном случае уровня) между электродами.
Подключение датчиков.
На одном клемнике, в данном случае Х4 могут подключаться, как дискретные датчики с нормально замкнутыми или разомкнутыми контактами, так и аналоговые датчики с выходным током от 4-20 мА. Поэтому, при проверке, каких либо датчиков, нужно четко уяснить к какому типу датчиков относится выбранный для проверки датчик. Если это дискретный датчик, то он проверяется на сопротивлении. Если это аналоговый датчик, то он проверяется на ток в миллиамперах.

Конструктивно системы дистанционного автоматического управления (ДАУ) состоят из следующих элементов:
1. Выносные посты управления
2. Компьютер
3. Модули контроля и управления.
4. Периферийные устройства.
Выносные посты управления устанавливаются в ЦПУ и на мостике, также могут устанавливаться на крыльях мостика (опционально). На них, как правило, устанавливаются пампы контроля и сигнализации, а также некоторые кнопки, такие как кветирование звукового и светового сигнала, блокировка сброса оборотов главного двигателя, блокировка аварийной остановки и т.д. Все кнопки и световая сигнализация имеют подсветку. В подсветке используется по две лампочки или два светодиода. Это делается затем, чтобы при выходе из строя одной пампы или светодиода, вторая работала и обеспечивала визуальный контроль за индикацией. Ползунковый механизм телеграфа переключает контакты или изменяет сопротивление потенциометра задатчика числа оборотов. Задатчик формирует сигнал, который идет на компьютер и отображает информацию о положении рукоятки телеграфа.
Компьютер предназначен для обработки информации, поступающей от выносных постов управления, от датчиков и выдает команды на органы управления соответственно заданной программы. Дисплей компьютера отображает текущую информацию о работе главного двигателя. Также, зайдя в сервисное меню, можно отследить, как изменяются параметры и работа отдельных элементов ДАУ, например, какое давление воздуха подается на регулятор оборотов при изменении положения рукоятки телеграфа. Зная из инструкции по эксплуатации данного типа двигателя данные по давлению воздуха управления, можно четко отрегулировать работу ДАУ.
Модули контроля и управления служат для приема информации от периферийных устройств и передачи её на компьютер в цифровом коде, а также для преобразования цифрового кода в управляющий сигнал. Модули могут работать только в одну или только в другую сторону, но могут быть и комбинированные, т.е., модуль может иметь шесть аналоговых входа, четыре контактных входа и десять релейных выхода. Также модули могут иметь и цифровые входы и выходы.
К периферийным устройствам относятся датчики, преобразователи одного вида сигнала в другой (электрический сигнал в давление воздуха управления), электромагнитные клапана. Проверка и отстройка датчиков рассматривается в главе «Датчики».
Неисправности и методы устранения.
К характерным неисправностям относятся:
1. Отказ одного или группы датчиков.
2. Двигатель сбрасывает обороты.
3. ДАУ не включается.
4. После длительной остановки с отключением систем смазки и управляющего воздуха не удается запустить двигатель.
5. Сбой в исполнении команд.
Методы устранения неисправностей.
о При отказе одного или группы датчиков осматривают сам датчик, кабель, подходящий к нему на предмет отсутствия контакта. Снимают разъем с датчика и проверяют его выход, если он контактный. Проверяется соединительная коробка на предмет обтяжки клеммных соединений. Затем проверяют клеммные соединения на модуле контроля и управления. проводники кабеля на должны касаться корпуса судна. Замена и отстройка датчиков см. главу «Датчики»,
о Осмотреть датчик оборотов, возможно, его загрязнение или отказ (поломка),
о Проверить, приходит ли питание на ДАУ, передано пи управление с локального поста на дистанционный
о Проверить пошагово алгоритм запуска систем главного двигателя, возможна блокировка из-за неправильной операции запуска систем,
о Проверить систему охлаждения компьютера. Возможно фильтр (если он стоит) засорен пылью. Проверить вентилятор. Температура в ЦПУ должна соответствовать температурному режиму работы ДАУ.
Судовые автоматизированные холодильные установки.
* Смотрите описание схемы автоматики для установок в приложении.
Судовые автоматизированные холодильные установки предназначены для обеспечения длительного хранения скоропортящихся продуктов и грузов на судне. Следовательно, одной из главных задач является поддержание температуры в охлаждаемых помещениях в заданных пределах.
Для этой цели применяются следующие автоматические приборы:
1. Термостаты.
2. Прессостаты (реле низкого давления).
3. Пропорциональные регуляторы давления. Рассмотрим работу и эксплуатацию этих приборов.
Регулирование температуры при помощи термостатов.
В холодильных камерах морских судов наиболее распространенным способом является двухпозиционное регулирование температуры, то есть открытие и закрытие соленоидного вентиля на жидкостной линии холодильного агента перед регуляторами перегрева (ТРВ), или пуск и остановка компрессора.
В подавляющем большинстве случаев температуру регулируют двухпозиционными регуляторами непрямого действия. Они состоят из двухпозиционного датчика температуры - термостата и соленоидного вентиля.

