




ГРУППА АТП-21
ПРЕПОДАВАТЕЛЬ: Резникова С.А.
Задания на курсовую работу
- Студенту предлагается выполнить курсовую работу на тему: «Расчет кинематических характеристик движущихся механизмов». В задачах данной работы определяются координаты, скорость, ускорение точки в любой назначенный момент времени при различных способах задания движения.
- Создать программу на языке Delphi. Результаты оформить в виде таблицы и графиков.
- Промоделировать движение системы путем графической анимации.
- Создать проект в среде MathCAD. Результаты оформить в виде таблицы и графиков.
- Сравнить результаты, полученные в пунктах 2 и 4.
Пояснения к поставленной задаче
Из всех способов задания движения точки наибольшее распространение получили координатный и естественный способы.
Рассмотрим вначале координатный способ задания движения точки. Положение в пространстве движущейся точки определяется тремя координатами в декартовой системе координат. Эти координаты задаются как функции времени:
 ;
;  ;
;  . (1)
. (1)
Зависимости (1) называются уравнениями движения точки в декартовых координатах.
Если движение точки происходит в плоскости ху, то задаются только два уравнения движения:
; .
При прямолинейном движении точки достаточно задать одно уравнение движения:
.
если принять, что ось х совпадает с прямой, по которой движется точка.
Скорость точки представляет собой вектор, характеризующий быстроту и направление движения точки в данный момент времени.
При задании движения точки уравнениями (1) проекции скорости на оси декартовых координат равны:
 ;
;  ;
;  .
.
Модуль скорости
 . (2)
. (2)
Направление скорости определяется направляющими косинусами:
Если движение точки задается в плоскости ху, то  ;
; 
 ;
;
При прямолинейном движении по оси х:
;  .
.
Характеристикой быстроты изменения скорости является ускорение а. Ускорение точки равно производной от вектора скорости по времени:
 .
.
При задании движения точки уравнениями (1) проекции ускорения на координатные оси равны:
 ;
;  ;
;  .
.
Модуль ускорения:
 . (3)
. (3)
Направление ускорения определяется направляющими косинусами
Если движение точки задается в плоскости ху, то  ;
;  ;
;
 ;
;
При прямолинейном движении по оси х
;  .
.
Далее рассмотрим естественный способ задания движения точки.
Считается, что движение точки задано естественным способом, если указаны ее траектория и закон изменения криволинейной координаты  . Уравнение называется законом движения точки по траектории. При этом на траектории указывается начало отсчета, а также положительное направление отсчета координаты s в виде стрелки
. Уравнение называется законом движения точки по траектории. При этом на траектории указывается начало отсчета, а также положительное направление отсчета координаты s в виде стрелки  .
.
Модуль скорости точки определяется по формуле
 . (4)
. (4)
Вектор скорости V направлен по касательной к траектории в сторону стрелки , если  , и в противоположную сторону, если
, и в противоположную сторону, если  .
.
Ускорение точки определяется как векторная сумма касательного и нормального ускорений точки:
 .
.
Модуль касательного ускорения определяется по формуле
 . (5)
. (5)
Вектор касательного ускорения  направлен по касательной к траектории в сторону стрелки , если
направлен по касательной к траектории в сторону стрелки , если  , и в противоположную, если
, и в противоположную, если  .
.
Модуль нормального ускорения определяется по формуле
 , (6)
, (6)
где  – радиус кривизны траектории в данной точке.
– радиус кривизны траектории в данной точке.
Вектор нормального ускорения  всегда направлен по главной нормали в сторону центра кривизны траектории.
всегда направлен по главной нормали в сторону центра кривизны траектории.
Модуль полного ускорения
 . (7)
. (7)
Если движение точки задано координатным способом, то можно определить параметры движения, характерные для естественного способа задания движения.
Так можно, например, по уравнениям движения точки (1) найти уравнение ее траектории в форме зависимости между координатами. Для этого надо из уравнений движения исключить время t. Затем можно найти закон движения точки по траектории , используя формулу (4). Из этой формулы следует, что  ; с учетом формулы (2) имеем
; с учетом формулы (2) имеем  и
и  . (8)
. (8)
В законе движения (8) за начало отсчета координаты s принимается начальное положение точки, когда  . Знак “плюс” или “минус” перед интегралом ставится в зависимости от выбора положительного направления отсчета координаты s: если движение точки начинается в сторону стрелки , то следует брать знак “плюс”, в противном случае – знак “минус”.
. Знак “плюс” или “минус” перед интегралом ставится в зависимости от выбора положительного направления отсчета координаты s: если движение точки начинается в сторону стрелки , то следует брать знак “плюс”, в противном случае – знак “минус”.
Рассмотрим случай, когда движение точки задается в полярных координатах. Пусть точка М движется все время в одной и той же плоскости. Тогда ее положение можно определить полярными координатами  и
и  (рис.1)
(рис.1)
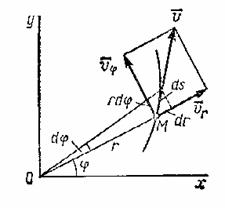
Рис.1
При движении точки  эти координаты с течением времени изменяются. Следовательно, закон движения точки в полярных координатах будет задаваться уравнениями
эти координаты с течением времени изменяются. Следовательно, закон движения точки в полярных координатах будет задаваться уравнениями
 ,
,  .
.
Скорость точки численно равна отношению элементарного перемещения  к промежутку времени
к промежутку времени  , то есть / . В данном случае перемещение геометрически слагается из радиального перемещения, численно равного
, то есть / . В данном случае перемещение геометрически слагается из радиального перемещения, численно равного  , и поперечного перемещения, перпендикулярного радиусу
, и поперечного перемещения, перпендикулярного радиусу  и численно равного
и численно равного  . Следовательно, сама скорость
. Следовательно, сама скорость  будет геометрически складываться из радиальной скорости
будет геометрически складываться из радиальной скорости  и поперечной (трансверсальной) скорости
и поперечной (трансверсальной) скорости  , численно равных
, численно равных
 ,
,  . (9)
. (9)
Так как и взаимно перпендикулярны, то модуль скорости точки определится по формуле
 . (10)
. (10)
Формулы (9) и (10) определяют скорость точки в полярных координатах при плоском движении.
Ниже приводятся (без вывода) формулы для определения проекций ускорения  на радиальное и трансверсальное направления, а также для определения его модуля
на радиальное и трансверсальное направления, а также для определения его модуля
 , (11)
, (11)
 .
.
Рассмотрим примеры решения задач.
Алгоритм решения задачи
1. Для получения уравнения траектория вида  исключить из уравнений движения время t:
исключить из уравнений движения время t:
2. Построить уравнение траектории
3. Для определения положения точки в начальный момент времени необходимо подставить значение в уравнения движения
4. Определить точки пересечения с осью х и с осью y.
5. Для определения закона движения точки по траектории воспользоваться формулой:
 , при
, при  ,
,
6. Определить направление (положительное либо отрицательное), найти S.
7. Чтобы найти уравнение траектории точки необходимо из уравнений движения исключить время. Для этого уравнения движения разрешить относительно функций и возвести полученные результаты в квадрат. Сложить эти уравнения.
Для определения положения точки в начальный момент времени необходимо подставить значение в уравнения движения.
Определить точки пересечения с осью х и с осью y.
Для определения закона движения точки по траектории воспользуемся формулой , при , найти S.
Определить время Т прохождения точкой полной окружности, Т – время, по истечении которого s станет равным длине окружности:
2pR=(3p/2)*T
8. Чтобы найти уравнение траектории точки вывести из уравнения  время t и возвести полученные результаты в квадрат.
время t и возвести полученные результаты в квадрат.
Уравнение траектории получается суммированием полученных уравнений.
Модуль скорости точки определяется по формуле 
.
При t=0: Vx=… и Vy=…., тогда V=….
При t=1c: Vx=… и Vy=…, тогда V=…..
Модуль ускорения точки определяется по формуле 
При t=0: ax=… ay=…,тогда a0=….,
При t=1c: ax=… ay=…,тогда a0=….

